Download as pdf or txt
You might also like
- COBIT 2019 - RACI by Role - April 2020Document295 pagesCOBIT 2019 - RACI by Role - April 2020gaston6711100% (1)
- LAB3Document4 pagesLAB3Juan Camilo Guarnizo Bermudez100% (1)
- Signals Systems Lab 2Document5 pagesSignals Systems Lab 2ahmad.a.touseefNo ratings yet
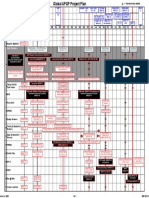
- GM 1927 01 Project PlanDocument1 pageGM 1927 01 Project Planmark100% (2)
- A Robust Extended Filter Design For SDINS Inflight AlignmentDocument7 pagesA Robust Extended Filter Design For SDINS Inflight AlignmentSalman MajeedNo ratings yet
- Conference 071817Document6 pagesConference 071817ghassen marouaniNo ratings yet
- Costate Prediction Based Optimal Control For Non-Linear Hybrid SystemsDocument6 pagesCostate Prediction Based Optimal Control For Non-Linear Hybrid Systemsapi-19660864No ratings yet
- LS102: Linear Time-Invariant SystemsDocument8 pagesLS102: Linear Time-Invariant SystemsBayar JargalNo ratings yet
- 202 End Term Solutions 2013Document17 pages202 End Term Solutions 2013Vikash ManidharNo ratings yet
- Mathematics 07 00428 PDFDocument15 pagesMathematics 07 00428 PDFAchraf El aouameNo ratings yet
- ICSENT12 ProceedingsDocument18 pagesICSENT12 ProceedingsmezianeNo ratings yet
- TPWL IeeeDocument6 pagesTPWL Ieeezhi.han1091No ratings yet
- 2014 22 Khamis Naidu NonlinearOptimalTracking Proceedingsofthe2014ACCPortlandOregonpp.2420 2425june2014Document7 pages2014 22 Khamis Naidu NonlinearOptimalTracking Proceedingsofthe2014ACCPortlandOregonpp.2420 2425june2014Nesibe Nur ÇamNo ratings yet
- DCT Presentation1Document39 pagesDCT Presentation1party0703No ratings yet
- Signals Analysis - Assignment # 2: Fourier Transform: Universidad de La SalleDocument6 pagesSignals Analysis - Assignment # 2: Fourier Transform: Universidad de La SalleWilliam Steven Triana GarciaNo ratings yet
- Electrical and Computer Engineering Department Drexel University, Philadelphia, PA 19104 Tel. (215) 895-2358 Fax. (215) 895-1695 Pozidis@cbis - Ece.drexel - Edu, Athina@artemis - Ece.drexel - EduDocument4 pagesElectrical and Computer Engineering Department Drexel University, Philadelphia, PA 19104 Tel. (215) 895-2358 Fax. (215) 895-1695 Pozidis@cbis - Ece.drexel - Edu, Athina@artemis - Ece.drexel - EduArindam BanerjeeNo ratings yet
- Robust Fault Detection and Isolation of Linear Systems - 2009 - IFAC ProceedingsDocument6 pagesRobust Fault Detection and Isolation of Linear Systems - 2009 - IFAC ProceedingsJauilson CrisostomoNo ratings yet
- Channel Equalization For Side Channel AttacksDocument16 pagesChannel Equalization For Side Channel Attackstechshow722No ratings yet
- Anomaly Detection Preprocessor For SNORT IDS SystemDocument2 pagesAnomaly Detection Preprocessor For SNORT IDS Systemdont4getNo ratings yet
- The Hong Kong Polytechnic University Department of Electronic and Information EngineeringDocument4 pagesThe Hong Kong Polytechnic University Department of Electronic and Information EngineeringNiaz ManikNo ratings yet
- Data Filtering Based Multi-Innovation Gradient Identification Methods For Feedback Nonlinear SystemsDocument2 pagesData Filtering Based Multi-Innovation Gradient Identification Methods For Feedback Nonlinear SystemsYasmine YasmineNo ratings yet
- ECE438 - Laboratory 2: Discrete-Time SystemsDocument6 pagesECE438 - Laboratory 2: Discrete-Time SystemsMusie WeldayNo ratings yet
- Cce330 (B) L: Matlab Applications in Signals and (Bio) Systems: American University of Science & TechnologyDocument7 pagesCce330 (B) L: Matlab Applications in Signals and (Bio) Systems: American University of Science & TechnologyDani Hajj Ali SleimanNo ratings yet
- Solution of The Developed Homogenous &Non-Homogenous Wave Equation Using MathematicaDocument11 pagesSolution of The Developed Homogenous &Non-Homogenous Wave Equation Using MathematicaAhmed HussainNo ratings yet
- Analog Signal Processing Tutorial 2: Sampling and ReconstructionDocument12 pagesAnalog Signal Processing Tutorial 2: Sampling and ReconstructionDuy Ngô Phạm ĐìnhNo ratings yet
- Lab Experiment-5 Discrete Cosine Transform/discrete Fourier Transform AimDocument29 pagesLab Experiment-5 Discrete Cosine Transform/discrete Fourier Transform AimVineeth KumarNo ratings yet
- Linear Estimation For Random Delay SystemsDocument10 pagesLinear Estimation For Random Delay SystemsPraneeth BobbaNo ratings yet
- Digital Signal Processing Important 2 Two Mark Question and Answer IT 1252Document14 pagesDigital Signal Processing Important 2 Two Mark Question and Answer IT 1252startedforfunNo ratings yet
- Adaptive Pinning Control: A Review of The Fully Decentralized Strategy and Its ExtensionsDocument16 pagesAdaptive Pinning Control: A Review of The Fully Decentralized Strategy and Its ExtensionsnataliaNo ratings yet
- Chapter - 5 - Part2 - DT Signals & SystemsDocument51 pagesChapter - 5 - Part2 - DT Signals & SystemsReddy BabuNo ratings yet
- Lai Sysid Time Series HankelDocument10 pagesLai Sysid Time Series HankelJules JoeNo ratings yet
- Adaptive MIMO Channel Estimation Using Sparse Variable Step-Size NLMS AlgorithmsDocument5 pagesAdaptive MIMO Channel Estimation Using Sparse Variable Step-Size NLMS AlgorithmsManohar ReddyNo ratings yet
- Particle Swarm Optimization-Based Functional Link Artificial Neural Network For Medical Image DenoisingDocument7 pagesParticle Swarm Optimization-Based Functional Link Artificial Neural Network For Medical Image DenoisingjenithNo ratings yet
- Filtering in Digital CommunicationsDocument23 pagesFiltering in Digital CommunicationsJessi HannaNo ratings yet
- Gabrys Bargiela 1996 Int SE CL Water Systems PDFDocument5 pagesGabrys Bargiela 1996 Int SE CL Water Systems PDFmaheshnagarkarNo ratings yet
- Maquin STA 09Document28 pagesMaquin STA 09p26q8p8xvrNo ratings yet
- LTI System: Digital Signal ProcessingDocument29 pagesLTI System: Digital Signal ProcessingIrum Nausheen Lecturer - FETNo ratings yet
- Digital Signal Processing (DSP) LAB Lab Report#03: SubjectDocument12 pagesDigital Signal Processing (DSP) LAB Lab Report#03: SubjectUprising RivalsNo ratings yet
- On Observer Design For Nonlinear Takagi-Sugeno Systems With Unmeasurable Premise VariableDocument6 pagesOn Observer Design For Nonlinear Takagi-Sugeno Systems With Unmeasurable Premise VariableaimalNo ratings yet
- MapReduce Algorithms For K-Means ClusteringDocument11 pagesMapReduce Algorithms For K-Means ClusteringfahmynadhifNo ratings yet
- State Estimation For Nonlinear System Diagnosis UsDocument9 pagesState Estimation For Nonlinear System Diagnosis UsFatiha HAMDINo ratings yet
- Recursive Least Squares Algorithm For Nonlinear Dual-Rate Systems Using Missing-Output Estimation ModelDocument20 pagesRecursive Least Squares Algorithm For Nonlinear Dual-Rate Systems Using Missing-Output Estimation ModelTín Trần TrungNo ratings yet
- Project 1Document11 pagesProject 1Ahmed AbdelhalimNo ratings yet
- Linear Prediction-Based DOA Estimator in Non-Uniform Noise: Circuits Systems and Signal Processing May 2021Document14 pagesLinear Prediction-Based DOA Estimator in Non-Uniform Noise: Circuits Systems and Signal Processing May 2021RahulMondolNo ratings yet
- On Transmission of A Continuous Signal Via A Noiseless Binary ChannelDocument11 pagesOn Transmission of A Continuous Signal Via A Noiseless Binary ChannelndokuchNo ratings yet
- RiceX - Discrete Time Signals and Systems, Part 1 Time DomainDocument5 pagesRiceX - Discrete Time Signals and Systems, Part 1 Time DomainCassia LmtNo ratings yet
- Hamiltonian Quantized Gossip: Mauro Franceschelli, Alessandro Giua, Carla SeatzuDocument15 pagesHamiltonian Quantized Gossip: Mauro Franceschelli, Alessandro Giua, Carla SeatzuEvariste OuattaraNo ratings yet
- A Multimodal Approach For Frequency Domain Independent Component Analysis With Geometrically-Based InitializationDocument5 pagesA Multimodal Approach For Frequency Domain Independent Component Analysis With Geometrically-Based InitializationcoolhemakumarNo ratings yet
- A Novel Architecture of RNS Based Lifting Integer Wavelet Transform (Iwt) and Comparative Study With Other Binary and Non-Binary DWTDocument9 pagesA Novel Architecture of RNS Based Lifting Integer Wavelet Transform (Iwt) and Comparative Study With Other Binary and Non-Binary DWTAnonymous e4UpOQEPNo ratings yet
- Fifth Problem Assignment: EE603 - DSP and Its ApplicationsDocument5 pagesFifth Problem Assignment: EE603 - DSP and Its Applicationschandan choudharyNo ratings yet
- 2008 - Multiple Local ARX Modeling For System Identification Using The Self-Organizing MapDocument10 pages2008 - Multiple Local ARX Modeling For System Identification Using The Self-Organizing MapAdamo OliveiraNo ratings yet
- International Refereed Journal of Engineering and Science (IRJES)Document8 pagesInternational Refereed Journal of Engineering and Science (IRJES)www.irjes.comNo ratings yet
- Systems & Control Letters: Srdjan S. Stanković, Dragoslav D. ŠiljakDocument5 pagesSystems & Control Letters: Srdjan S. Stanković, Dragoslav D. Šiljakfalcon_vamNo ratings yet
- First Problem Assignment: EE603 - DSP and Its ApplicationsDocument3 pagesFirst Problem Assignment: EE603 - DSP and Its ApplicationsRahul CPNo ratings yet
- Optimal MTM Spectral Estimation Based Detection For Cognitive Radio in HDTVDocument5 pagesOptimal MTM Spectral Estimation Based Detection For Cognitive Radio in HDTVAbdul RahimNo ratings yet
- BeielsteinPV04a APPL NUM ANAL COMP MATH 1 pp413-433 2004Document21 pagesBeielsteinPV04a APPL NUM ANAL COMP MATH 1 pp413-433 2004Joezerk CarpioNo ratings yet
- Finite-Time Event-Triggered Extended Dissipative Control For Discrete Time Switched Linear Systems - DiscreteDocument17 pagesFinite-Time Event-Triggered Extended Dissipative Control For Discrete Time Switched Linear Systems - DiscreteBharathNo ratings yet
- Global Exponential Stabilization For A Class of Uncertain Nonlinear Control Systems Via Linear Static ControlDocument4 pagesGlobal Exponential Stabilization For A Class of Uncertain Nonlinear Control Systems Via Linear Static ControlEditor IJTSRDNo ratings yet
- Journal of Computational and Applied Mathematics: M. Reza Peyghami, S. Fathi Hafshejani, L. ShirvaniDocument12 pagesJournal of Computational and Applied Mathematics: M. Reza Peyghami, S. Fathi Hafshejani, L. ShirvaniSebastian David Ariza CollNo ratings yet
- Time Domain Analysis of SignalsDocument19 pagesTime Domain Analysis of SignalsshashankifNo ratings yet
- DSP Lab Project #2Document9 pagesDSP Lab Project #2stephenchukwuemeka12No ratings yet
- Amis Sutrima2020Document9 pagesAmis Sutrima2020sutrimaNo ratings yet
- Line Drawing Algorithm: Mastering Techniques for Precision Image RenderingFrom EverandLine Drawing Algorithm: Mastering Techniques for Precision Image RenderingNo ratings yet
- An Adaptive Unscented Kalman Filter For Tracki - 2014 - Mechanical Systems and SDocument15 pagesAn Adaptive Unscented Kalman Filter For Tracki - 2014 - Mechanical Systems and S彭力No ratings yet
- A Markovian System Approach To Distributed H Filteri - 2014 - Journal of The FRDocument17 pagesA Markovian System Approach To Distributed H Filteri - 2014 - Journal of The FR彭力No ratings yet
- A New Filtering Approach For Continuous Time Linear Sys - 2014 - IFAC ProceedingDocument6 pagesA New Filtering Approach For Continuous Time Linear Sys - 2014 - IFAC Proceeding彭力No ratings yet
- A Distributed Particle Filter For Nonlinear Tracking in Wi - 2014 - Signal ProceDocument14 pagesA Distributed Particle Filter For Nonlinear Tracking in Wi - 2014 - Signal Proce彭力No ratings yet
- H Filtering For Nonlinear Stochastic Systems With Sensor Saturation, Quantization and Random Packet LossesDocument10 pagesH Filtering For Nonlinear Stochastic Systems With Sensor Saturation, Quantization and Random Packet Losses彭力No ratings yet
- An Event Triggered Approach To Distributed H State Esti - 2018 - Journal of TheDocument18 pagesAn Event Triggered Approach To Distributed H State Esti - 2018 - Journal of The彭力No ratings yet
- 催稿信Document1 page催稿信彭力No ratings yet
- Network Based Event Triggered H Filtering For Discrete Time - 2018 - Signal ProDocument10 pagesNetwork Based Event Triggered H Filtering For Discrete Time - 2018 - Signal Pro彭力No ratings yet
- 撤稿信Document1 page撤稿信彭力No ratings yet
- Robust H Filtering For Continuous Time Nonhomogeneous Markov - 2018 - Signal PDocument10 pagesRobust H Filtering For Continuous Time Nonhomogeneous Markov - 2018 - Signal P彭力No ratings yet
- Change Order - Rev2 - 44873036-001Document5 pagesChange Order - Rev2 - 44873036-001Hugo MoralesNo ratings yet
- File DisksDocument22 pagesFile DisksAlana PetersonNo ratings yet
- HARVARD Referencing Made EasyDocument1 pageHARVARD Referencing Made EasyMediaMassageNo ratings yet
- Nicky Aulia Nissa: Resume ObjectiveDocument1 pageNicky Aulia Nissa: Resume ObjectiveNicky Aulia NissaNo ratings yet
- 2.High-Confidence Behavior at Work The Exec SkillsDocument27 pages2.High-Confidence Behavior at Work The Exec SkillsRamiro BernalesNo ratings yet
- Vietnam SPC - Vinyl Price ListDocument9 pagesVietnam SPC - Vinyl Price ListThe Cultural CommitteeNo ratings yet
- Milling MachinesDocument39 pagesMilling MachinesSahil Sheth0% (1)
- Business Plan-HCB MFGDocument18 pagesBusiness Plan-HCB MFGGenene asefa Debele75% (4)
- Visible ThinkingDocument4 pagesVisible ThinkinginterianobersabeNo ratings yet
- Chapter 03 - Louwers 5eDocument23 pagesChapter 03 - Louwers 5eMonique GordonNo ratings yet
- Revision On Unit 1,2 First Secondry (Hello)Document11 pagesRevision On Unit 1,2 First Secondry (Hello)Vivian GendyNo ratings yet
- Science Lesson PlanDocument5 pagesScience Lesson Planapi-285283157No ratings yet
- ASX Announcement 2021 23 - CRU Conference PresentationDocument26 pagesASX Announcement 2021 23 - CRU Conference PresentationÂngelo PereiraNo ratings yet
- Massey Ferguson MF 148 TRACTOR (GB) Service Parts Catalogue ManualDocument14 pagesMassey Ferguson MF 148 TRACTOR (GB) Service Parts Catalogue Manualbvk2980022No ratings yet
- Conceptual Approaches To Human EcologyDocument24 pagesConceptual Approaches To Human EcologyBilly WenNo ratings yet
- Chavan Avinash-Resume 2Document1 pageChavan Avinash-Resume 2Adinath Baliram ShelkeNo ratings yet
- Light MeterDocument12 pagesLight MeterAmar Nath PrasadNo ratings yet
- Hazcom ToolsDocument25 pagesHazcom ToolsAbdul hayeeNo ratings yet
- Procurement PlanDocument32 pagesProcurement Planario widjaksono100% (1)
- Genetic Mutation LAB SHEET REVISEDDocument2 pagesGenetic Mutation LAB SHEET REVISEDyusufoyololaNo ratings yet
- CookiesDocument130 pagesCookiesNinjamuppetNo ratings yet
- ARM Instruction SetDocument3 pagesARM Instruction SetnhungdieubatchotNo ratings yet
- Service Manual TTI TCB-771 ENGDocument13 pagesService Manual TTI TCB-771 ENGAdam100% (1)
- Capstone Project Proposal: My Inquiry Question IsDocument7 pagesCapstone Project Proposal: My Inquiry Question Isapi-491542571No ratings yet
- Current Issues in AIS655Document5 pagesCurrent Issues in AIS655AmmarNo ratings yet
- 1385 PDFDocument70 pages1385 PDFEdmund ZinNo ratings yet
- News PapperDocument10 pagesNews PapperArunNo ratings yet