
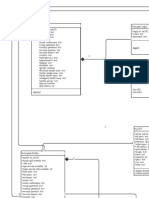
Sensor Pack Summary
Sensor Pack Summary
You might also like
- CG Viva+questions+&ANSWERSDocument13 pagesCG Viva+questions+&ANSWERSJinsKJoy75% (4)
- CG Theory AssignmentDocument22 pagesCG Theory AssignmentpinkyNo ratings yet
- Din 50942-96Document13 pagesDin 50942-96RONALD100% (2)
- Cloud Computing Basics - T. B. RehmanDocument198 pagesCloud Computing Basics - T. B. Rehmantim.howell8050No ratings yet
- Ficient Mapping of CORDIC Algorithm For OFDM-Based WLANDocument11 pagesFicient Mapping of CORDIC Algorithm For OFDM-Based WLANvyshaqgNo ratings yet
- Cross Dataset Sensor Alignment Making Visual 3D Object Detector GeneralizeDocument8 pagesCross Dataset Sensor Alignment Making Visual 3D Object Detector Generalizemasoud kiaNo ratings yet
- Resolution Adjustable 3D Scanner Based On Using Stereo CamerasDocument5 pagesResolution Adjustable 3D Scanner Based On Using Stereo Camerasverze1No ratings yet
- Kinect-Based Obstacle Detection For Manipulator: Panjawee Rakprayoon, Miti Ruchanurucks, and Ada CoundoulDocument6 pagesKinect-Based Obstacle Detection For Manipulator: Panjawee Rakprayoon, Miti Ruchanurucks, and Ada CoundoulCamilo Ernesto Pardo BeainyNo ratings yet
- Project1Report (Prakash)Document12 pagesProject1Report (Prakash)pgnepal100% (1)
- SOPC Implementation of Software-Defined Radio: First PrizeDocument16 pagesSOPC Implementation of Software-Defined Radio: First PrizenanostallmannNo ratings yet
- 2D 1 2 Visual Servoing Stability Analysis With Respect To Camera Calibration ErrorsDocument7 pages2D 1 2 Visual Servoing Stability Analysis With Respect To Camera Calibration ErrorsMotasim MustafaNo ratings yet
- Computer Vision For Driver Assi - Mahdi Rezaei,-56-57Document2 pagesComputer Vision For Driver Assi - Mahdi Rezaei,-56-57Jhonatan GutierrezNo ratings yet
- Implementation of Cordic Algorithm Using Matlab & VHDL For Wlan ReceiverDocument3 pagesImplementation of Cordic Algorithm Using Matlab & VHDL For Wlan ReceiverHemant SaraswatNo ratings yet
- A Survey of CORDIC Algorithms For FPGA Based Computers: Ray AndrakaDocument0 pagesA Survey of CORDIC Algorithms For FPGA Based Computers: Ray AndrakaCix XidNo ratings yet
- Remotesensing 02 01610Document15 pagesRemotesensing 02 01610Magno RegisNo ratings yet
- Lidar Iris For Loop-Closure DetectionDocument7 pagesLidar Iris For Loop-Closure Detectionpepepe123jkghjkhNo ratings yet
- Cordic SVD HWDocument6 pagesCordic SVD HWasdf2828No ratings yet
- 2012 - A Benchmark For The Evaluation of RGB-D SLAM Systems - SturmDocument8 pages2012 - A Benchmark For The Evaluation of RGB-D SLAM Systems - SturmRiriNo ratings yet
- What Is An Image Sensor CCD Image Sensors CMOS Image Sensors Main Advantages/Disadvantages Matlab Image Processing ToolboxDocument28 pagesWhat Is An Image Sensor CCD Image Sensors CMOS Image Sensors Main Advantages/Disadvantages Matlab Image Processing ToolboxSalomon SalomonNo ratings yet
- Experiment 1Document4 pagesExperiment 1tusarNo ratings yet
- Autocalibration of An Ad Hoc Construction of Multi-Projector DisplaysDocument8 pagesAutocalibration of An Ad Hoc Construction of Multi-Projector DisplaysIonuț AvramescuNo ratings yet
- Digital Setting Circles For Amateur Telescopes - EncoderDocument36 pagesDigital Setting Circles For Amateur Telescopes - EncoderAlex Icanaque RivasNo ratings yet
- Project 3Document16 pagesProject 3gsjhgNo ratings yet
- Recording and Displaying of ImagesDocument33 pagesRecording and Displaying of ImagesAmogha UpadhyayaNo ratings yet
- Prdution Assignment-1 MUGUNTHANDocument9 pagesPrdution Assignment-1 MUGUNTHANMugun ThanNo ratings yet
- P S ECE 645: C: .: Roject Pecification Omputer Arithemetic Implementaiton in Hardware and SoftwareDocument6 pagesP S ECE 645: C: .: Roject Pecification Omputer Arithemetic Implementaiton in Hardware and SoftwareHarsh BaghelNo ratings yet
- Shao Xiong2015Document5 pagesShao Xiong2015Thông VõNo ratings yet
- High Resolution Radar Cross Section Imaging Based On Complex Target Backscattering SimulationDocument4 pagesHigh Resolution Radar Cross Section Imaging Based On Complex Target Backscattering SimulationYuri BobkovNo ratings yet
- CORDICDocument8 pagesCORDICRofaelEmilNo ratings yet
- Cockrum Fall 2008 Final PaperDocument15 pagesCockrum Fall 2008 Final Papernayeem4444No ratings yet
- Self-Balancing Robot: A Project Report Group: Ning Hu Zexin LiDocument13 pagesSelf-Balancing Robot: A Project Report Group: Ning Hu Zexin LiJay SutharNo ratings yet
- Camera CalibrationDocument39 pagesCamera CalibrationyokeshNo ratings yet
- Multi-Camera Calibration Method Based On Minimizing The Difference of Reprojection Error VectorsDocument10 pagesMulti-Camera Calibration Method Based On Minimizing The Difference of Reprojection Error VectorsRiyaan BakhdaNo ratings yet
- Robotic Pool: An Experiment Automatic Potting: Johan Roth3, of Computing, 3dept. of ofDocument6 pagesRobotic Pool: An Experiment Automatic Potting: Johan Roth3, of Computing, 3dept. of ofVansala GanesanNo ratings yet
- Robot-Sensor System Integration by Means Vision Ultrasonic Sensing For Localization and Recognition ObjectsDocument7 pagesRobot-Sensor System Integration by Means Vision Ultrasonic Sensing For Localization and Recognition ObjectsRavi SharmaNo ratings yet
- CG AssignmentDocument47 pagesCG AssignmentdddddhwNo ratings yet
- Unit-I: 1.what Is Scan Conversion?Document10 pagesUnit-I: 1.what Is Scan Conversion?sNo ratings yet
- Visual Servo Control TheoryDocument42 pagesVisual Servo Control TheoryP NagarajanNo ratings yet
- Implementation and Performance Analysis PDFDocument5 pagesImplementation and Performance Analysis PDFMohamed GanounNo ratings yet
- Study of The SR4000 Camera Miguel Cazorla, Diego Viejo, and Cristina PomaresDocument6 pagesStudy of The SR4000 Camera Miguel Cazorla, Diego Viejo, and Cristina PomaresMatPrice78No ratings yet
- Ch3 Robot Vision, Programming, ApplicationsDocument29 pagesCh3 Robot Vision, Programming, ApplicationsMelkamu SimenehNo ratings yet
- Computer Graphics QBDocument19 pagesComputer Graphics QBAruna BajpaiNo ratings yet
- Wemmu 001Document4 pagesWemmu 001shastryNo ratings yet
- 1111Document2 pages1111Yogesh FalakNo ratings yet
- Ee267 Notes TrackingDocument17 pagesEe267 Notes Trackingفاعل خيرNo ratings yet
- MC0072 Sem3 Feb 2011 SmuDocument38 pagesMC0072 Sem3 Feb 2011 SmuNitin SivachNo ratings yet
- CG VivaDocument10 pagesCG VivaSantOsh JamaDarNo ratings yet
- FPGA Implementation of Sine and Cosine Generators Using The CORDIC AlgorithmDocument13 pagesFPGA Implementation of Sine and Cosine Generators Using The CORDIC AlgorithmGovind AtalNo ratings yet
- Precision Robotic Displacement Using FPGA: Aswathy Surendran.P, V.Saminathan, M.UdhayakumarDocument4 pagesPrecision Robotic Displacement Using FPGA: Aswathy Surendran.P, V.Saminathan, M.UdhayakumarerpublicationNo ratings yet
- Integrally Accurate Resolver-To-Digital Converter RDCDocument4 pagesIntegrally Accurate Resolver-To-Digital Converter RDCSilvestarNo ratings yet
- 3D Time-Of - Ight Cameras For Mobile RoboticsDocument6 pages3D Time-Of - Ight Cameras For Mobile RoboticsNameZero912No ratings yet
- DCTDocument39 pagesDCTrsureNo ratings yet
- 1.Radar-Camera Sensor Fusion Based Object Detection For ... - ThinkMindDocument6 pages1.Radar-Camera Sensor Fusion Based Object Detection For ... - ThinkMindThanh LeNo ratings yet
- A Calibration Procedure For The Parallel Robot Delta 4: P. Maurine, E. DombreDocument6 pagesA Calibration Procedure For The Parallel Robot Delta 4: P. Maurine, E. DombreHoracio GeorgeNo ratings yet
- An Implementation of SIFT Detector and Descriptor: Andrea Vedaldi University of California at Los AngelesDocument7 pagesAn Implementation of SIFT Detector and Descriptor: Andrea Vedaldi University of California at Los AngelesParis BoubNo ratings yet
- Computer Graphics Lecture 4Document55 pagesComputer Graphics Lecture 4Crystal DzebuNo ratings yet
- Angulation Theory PDFDocument10 pagesAngulation Theory PDFAndreyNo ratings yet
- Geometric Aspects Concerning The Photogrammetric Workflow of The Digital Aerial Camera UltracamDocument6 pagesGeometric Aspects Concerning The Photogrammetric Workflow of The Digital Aerial Camera UltracamMano DragonNo ratings yet
- Vision-Based Obstacle Avoidance On Quadcopter: Kashif Khurshid Noori, Manish Kumar Mishra & Md. Zafaryab AbdullahDocument10 pagesVision-Based Obstacle Avoidance On Quadcopter: Kashif Khurshid Noori, Manish Kumar Mishra & Md. Zafaryab AbdullahTJPRC PublicationsNo ratings yet
- CG Viva Questions ANSWERSDocument13 pagesCG Viva Questions ANSWERSrajeshmanam0% (1)
- Multi View Three Dimensional Reconstruction: Advanced Techniques for Spatial Perception in Computer VisionFrom EverandMulti View Three Dimensional Reconstruction: Advanced Techniques for Spatial Perception in Computer VisionNo ratings yet
- CV +chakirDocument4 pagesCV +chakirMUHAMMAD UMARNo ratings yet
- CV Metsola 20122021Document4 pagesCV Metsola 20122021MUHAMMAD UMARNo ratings yet
- TENK CV Template 2020Document6 pagesTENK CV Template 2020MUHAMMAD UMARNo ratings yet
- CV Example TENKDocument4 pagesCV Example TENKMUHAMMAD UMAR0% (1)
- Separation - Level 6 - QuestionsDocument5 pagesSeparation - Level 6 - QuestionsShahnaz AhmedNo ratings yet
- Effect of Grass Carpfish DensityDocument12 pagesEffect of Grass Carpfish DensitymarofNo ratings yet
- Class Diagram - DrawioDocument24 pagesClass Diagram - DrawioFizba TahirNo ratings yet
- Coepro2 Higher Order Square MatricesDocument23 pagesCoepro2 Higher Order Square MatricesAJNo ratings yet
- Canon w8400 SM PCDocument235 pagesCanon w8400 SM PCkane123100% (1)
- (2001) Optimal Control by Least Squares Support Vector MachinesDocument13 pages(2001) Optimal Control by Least Squares Support Vector MachinesPaul AlvarezNo ratings yet
- Tithi CalculationsDocument15 pagesTithi CalculationsSowmindra RottiNo ratings yet
- Teaching DemoDocument7 pagesTeaching DemoMaer PohaneNo ratings yet
- 137-Article Text-3834-1-10-20200908Document25 pages137-Article Text-3834-1-10-20200908Mustqf B.No ratings yet
- TO1-Group-5 Soil Mechanics Lab Experiment No. 4Document7 pagesTO1-Group-5 Soil Mechanics Lab Experiment No. 4Xam AcostaNo ratings yet
- Cryptography and Network Security: Fourth Edition by William StallingsDocument33 pagesCryptography and Network Security: Fourth Edition by William Stallingsprudhvi chowdaryNo ratings yet
- ISD1700 Design Guide - pdf1Document83 pagesISD1700 Design Guide - pdf1leomancaNo ratings yet
- Sony Bx1s Chassis Kv-Ar14m50 SMDocument195 pagesSony Bx1s Chassis Kv-Ar14m50 SMCube7 GeronimoNo ratings yet
- Delta-Star Connection of TransformerDocument9 pagesDelta-Star Connection of TransformernikolakaNo ratings yet
- Msunit 2 GraspsDocument6 pagesMsunit 2 Graspsapi-338845804No ratings yet
- 11N95 DGT PH2 DSDocument50 pages11N95 DGT PH2 DSSundar RamasamyNo ratings yet
- Electrical Installation and Maintenance (Eim) 5Document55 pagesElectrical Installation and Maintenance (Eim) 5Victor Rosales100% (1)
- HemantDocument22 pagesHemantJatin JakadNo ratings yet
- Fyp 1Document26 pagesFyp 1Taha RahatNo ratings yet
- Introduction To Computer MCQsDocument5 pagesIntroduction To Computer MCQsNoor KhanNo ratings yet
- PC 2201Document12 pagesPC 2201Irwan SamtaniNo ratings yet
- Running A Java Concurrent Program in Oracle AppsDocument6 pagesRunning A Java Concurrent Program in Oracle AppscvkrajNo ratings yet
- Therblig Chart (17 Motions)Document10 pagesTherblig Chart (17 Motions)Marianne Tajanlangit BebitNo ratings yet
- Chapter 06Document25 pagesChapter 06aclivisNo ratings yet
- Motion Canada - Bearing CatalogDocument212 pagesMotion Canada - Bearing CatalogEric Lafrance100% (1)
- Load Characterstics of DC Shunt GeneratorDocument2 pagesLoad Characterstics of DC Shunt Generatorravi12rNo ratings yet
- Archaeologia Bulgarica 2008 XII 2Document22 pagesArchaeologia Bulgarica 2008 XII 2Donka KolevaNo ratings yet
- Peter EnglandDocument29 pagesPeter EnglandANKITA CHANDEL0% (1)




























































































Download as docx, pdf, or txt
You might also like
- CG Viva+questions+&ANSWERSDocument13 pagesCG Viva+questions+&ANSWERSJinsKJoy75% (4)
- CG Theory AssignmentDocument22 pagesCG Theory AssignmentpinkyNo ratings yet
- Din 50942-96Document13 pagesDin 50942-96RONALD100% (2)
- Cloud Computing Basics - T. B. RehmanDocument198 pagesCloud Computing Basics - T. B. Rehmantim.howell8050No ratings yet
- Ficient Mapping of CORDIC Algorithm For OFDM-Based WLANDocument11 pagesFicient Mapping of CORDIC Algorithm For OFDM-Based WLANvyshaqgNo ratings yet
- Cross Dataset Sensor Alignment Making Visual 3D Object Detector GeneralizeDocument8 pagesCross Dataset Sensor Alignment Making Visual 3D Object Detector Generalizemasoud kiaNo ratings yet
- Resolution Adjustable 3D Scanner Based On Using Stereo CamerasDocument5 pagesResolution Adjustable 3D Scanner Based On Using Stereo Camerasverze1No ratings yet
- Kinect-Based Obstacle Detection For Manipulator: Panjawee Rakprayoon, Miti Ruchanurucks, and Ada CoundoulDocument6 pagesKinect-Based Obstacle Detection For Manipulator: Panjawee Rakprayoon, Miti Ruchanurucks, and Ada CoundoulCamilo Ernesto Pardo BeainyNo ratings yet
- Project1Report (Prakash)Document12 pagesProject1Report (Prakash)pgnepal100% (1)
- SOPC Implementation of Software-Defined Radio: First PrizeDocument16 pagesSOPC Implementation of Software-Defined Radio: First PrizenanostallmannNo ratings yet
- 2D 1 2 Visual Servoing Stability Analysis With Respect To Camera Calibration ErrorsDocument7 pages2D 1 2 Visual Servoing Stability Analysis With Respect To Camera Calibration ErrorsMotasim MustafaNo ratings yet
- Computer Vision For Driver Assi - Mahdi Rezaei,-56-57Document2 pagesComputer Vision For Driver Assi - Mahdi Rezaei,-56-57Jhonatan GutierrezNo ratings yet
- Implementation of Cordic Algorithm Using Matlab & VHDL For Wlan ReceiverDocument3 pagesImplementation of Cordic Algorithm Using Matlab & VHDL For Wlan ReceiverHemant SaraswatNo ratings yet
- A Survey of CORDIC Algorithms For FPGA Based Computers: Ray AndrakaDocument0 pagesA Survey of CORDIC Algorithms For FPGA Based Computers: Ray AndrakaCix XidNo ratings yet
- Remotesensing 02 01610Document15 pagesRemotesensing 02 01610Magno RegisNo ratings yet
- Lidar Iris For Loop-Closure DetectionDocument7 pagesLidar Iris For Loop-Closure Detectionpepepe123jkghjkhNo ratings yet
- Cordic SVD HWDocument6 pagesCordic SVD HWasdf2828No ratings yet
- 2012 - A Benchmark For The Evaluation of RGB-D SLAM Systems - SturmDocument8 pages2012 - A Benchmark For The Evaluation of RGB-D SLAM Systems - SturmRiriNo ratings yet
- What Is An Image Sensor CCD Image Sensors CMOS Image Sensors Main Advantages/Disadvantages Matlab Image Processing ToolboxDocument28 pagesWhat Is An Image Sensor CCD Image Sensors CMOS Image Sensors Main Advantages/Disadvantages Matlab Image Processing ToolboxSalomon SalomonNo ratings yet
- Experiment 1Document4 pagesExperiment 1tusarNo ratings yet
- Autocalibration of An Ad Hoc Construction of Multi-Projector DisplaysDocument8 pagesAutocalibration of An Ad Hoc Construction of Multi-Projector DisplaysIonuț AvramescuNo ratings yet
- Digital Setting Circles For Amateur Telescopes - EncoderDocument36 pagesDigital Setting Circles For Amateur Telescopes - EncoderAlex Icanaque RivasNo ratings yet
- Project 3Document16 pagesProject 3gsjhgNo ratings yet
- Recording and Displaying of ImagesDocument33 pagesRecording and Displaying of ImagesAmogha UpadhyayaNo ratings yet
- Prdution Assignment-1 MUGUNTHANDocument9 pagesPrdution Assignment-1 MUGUNTHANMugun ThanNo ratings yet
- P S ECE 645: C: .: Roject Pecification Omputer Arithemetic Implementaiton in Hardware and SoftwareDocument6 pagesP S ECE 645: C: .: Roject Pecification Omputer Arithemetic Implementaiton in Hardware and SoftwareHarsh BaghelNo ratings yet
- Shao Xiong2015Document5 pagesShao Xiong2015Thông VõNo ratings yet
- High Resolution Radar Cross Section Imaging Based On Complex Target Backscattering SimulationDocument4 pagesHigh Resolution Radar Cross Section Imaging Based On Complex Target Backscattering SimulationYuri BobkovNo ratings yet
- CORDICDocument8 pagesCORDICRofaelEmilNo ratings yet
- Cockrum Fall 2008 Final PaperDocument15 pagesCockrum Fall 2008 Final Papernayeem4444No ratings yet
- Self-Balancing Robot: A Project Report Group: Ning Hu Zexin LiDocument13 pagesSelf-Balancing Robot: A Project Report Group: Ning Hu Zexin LiJay SutharNo ratings yet
- Camera CalibrationDocument39 pagesCamera CalibrationyokeshNo ratings yet
- Multi-Camera Calibration Method Based On Minimizing The Difference of Reprojection Error VectorsDocument10 pagesMulti-Camera Calibration Method Based On Minimizing The Difference of Reprojection Error VectorsRiyaan BakhdaNo ratings yet
- Robotic Pool: An Experiment Automatic Potting: Johan Roth3, of Computing, 3dept. of ofDocument6 pagesRobotic Pool: An Experiment Automatic Potting: Johan Roth3, of Computing, 3dept. of ofVansala GanesanNo ratings yet
- Robot-Sensor System Integration by Means Vision Ultrasonic Sensing For Localization and Recognition ObjectsDocument7 pagesRobot-Sensor System Integration by Means Vision Ultrasonic Sensing For Localization and Recognition ObjectsRavi SharmaNo ratings yet
- CG AssignmentDocument47 pagesCG AssignmentdddddhwNo ratings yet
- Unit-I: 1.what Is Scan Conversion?Document10 pagesUnit-I: 1.what Is Scan Conversion?sNo ratings yet
- Visual Servo Control TheoryDocument42 pagesVisual Servo Control TheoryP NagarajanNo ratings yet
- Implementation and Performance Analysis PDFDocument5 pagesImplementation and Performance Analysis PDFMohamed GanounNo ratings yet
- Study of The SR4000 Camera Miguel Cazorla, Diego Viejo, and Cristina PomaresDocument6 pagesStudy of The SR4000 Camera Miguel Cazorla, Diego Viejo, and Cristina PomaresMatPrice78No ratings yet
- Ch3 Robot Vision, Programming, ApplicationsDocument29 pagesCh3 Robot Vision, Programming, ApplicationsMelkamu SimenehNo ratings yet
- Computer Graphics QBDocument19 pagesComputer Graphics QBAruna BajpaiNo ratings yet
- Wemmu 001Document4 pagesWemmu 001shastryNo ratings yet
- 1111Document2 pages1111Yogesh FalakNo ratings yet
- Ee267 Notes TrackingDocument17 pagesEe267 Notes Trackingفاعل خيرNo ratings yet
- MC0072 Sem3 Feb 2011 SmuDocument38 pagesMC0072 Sem3 Feb 2011 SmuNitin SivachNo ratings yet
- CG VivaDocument10 pagesCG VivaSantOsh JamaDarNo ratings yet
- FPGA Implementation of Sine and Cosine Generators Using The CORDIC AlgorithmDocument13 pagesFPGA Implementation of Sine and Cosine Generators Using The CORDIC AlgorithmGovind AtalNo ratings yet
- Precision Robotic Displacement Using FPGA: Aswathy Surendran.P, V.Saminathan, M.UdhayakumarDocument4 pagesPrecision Robotic Displacement Using FPGA: Aswathy Surendran.P, V.Saminathan, M.UdhayakumarerpublicationNo ratings yet
- Integrally Accurate Resolver-To-Digital Converter RDCDocument4 pagesIntegrally Accurate Resolver-To-Digital Converter RDCSilvestarNo ratings yet
- 3D Time-Of - Ight Cameras For Mobile RoboticsDocument6 pages3D Time-Of - Ight Cameras For Mobile RoboticsNameZero912No ratings yet
- DCTDocument39 pagesDCTrsureNo ratings yet
- 1.Radar-Camera Sensor Fusion Based Object Detection For ... - ThinkMindDocument6 pages1.Radar-Camera Sensor Fusion Based Object Detection For ... - ThinkMindThanh LeNo ratings yet
- A Calibration Procedure For The Parallel Robot Delta 4: P. Maurine, E. DombreDocument6 pagesA Calibration Procedure For The Parallel Robot Delta 4: P. Maurine, E. DombreHoracio GeorgeNo ratings yet
- An Implementation of SIFT Detector and Descriptor: Andrea Vedaldi University of California at Los AngelesDocument7 pagesAn Implementation of SIFT Detector and Descriptor: Andrea Vedaldi University of California at Los AngelesParis BoubNo ratings yet
- Computer Graphics Lecture 4Document55 pagesComputer Graphics Lecture 4Crystal DzebuNo ratings yet
- Angulation Theory PDFDocument10 pagesAngulation Theory PDFAndreyNo ratings yet
- Geometric Aspects Concerning The Photogrammetric Workflow of The Digital Aerial Camera UltracamDocument6 pagesGeometric Aspects Concerning The Photogrammetric Workflow of The Digital Aerial Camera UltracamMano DragonNo ratings yet
- Vision-Based Obstacle Avoidance On Quadcopter: Kashif Khurshid Noori, Manish Kumar Mishra & Md. Zafaryab AbdullahDocument10 pagesVision-Based Obstacle Avoidance On Quadcopter: Kashif Khurshid Noori, Manish Kumar Mishra & Md. Zafaryab AbdullahTJPRC PublicationsNo ratings yet
- CG Viva Questions ANSWERSDocument13 pagesCG Viva Questions ANSWERSrajeshmanam0% (1)
- Multi View Three Dimensional Reconstruction: Advanced Techniques for Spatial Perception in Computer VisionFrom EverandMulti View Three Dimensional Reconstruction: Advanced Techniques for Spatial Perception in Computer VisionNo ratings yet
- CV +chakirDocument4 pagesCV +chakirMUHAMMAD UMARNo ratings yet
- CV Metsola 20122021Document4 pagesCV Metsola 20122021MUHAMMAD UMARNo ratings yet
- TENK CV Template 2020Document6 pagesTENK CV Template 2020MUHAMMAD UMARNo ratings yet
- CV Example TENKDocument4 pagesCV Example TENKMUHAMMAD UMAR0% (1)
- Separation - Level 6 - QuestionsDocument5 pagesSeparation - Level 6 - QuestionsShahnaz AhmedNo ratings yet
- Effect of Grass Carpfish DensityDocument12 pagesEffect of Grass Carpfish DensitymarofNo ratings yet
- Class Diagram - DrawioDocument24 pagesClass Diagram - DrawioFizba TahirNo ratings yet
- Coepro2 Higher Order Square MatricesDocument23 pagesCoepro2 Higher Order Square MatricesAJNo ratings yet
- Canon w8400 SM PCDocument235 pagesCanon w8400 SM PCkane123100% (1)
- (2001) Optimal Control by Least Squares Support Vector MachinesDocument13 pages(2001) Optimal Control by Least Squares Support Vector MachinesPaul AlvarezNo ratings yet
- Tithi CalculationsDocument15 pagesTithi CalculationsSowmindra RottiNo ratings yet
- Teaching DemoDocument7 pagesTeaching DemoMaer PohaneNo ratings yet
- 137-Article Text-3834-1-10-20200908Document25 pages137-Article Text-3834-1-10-20200908Mustqf B.No ratings yet
- TO1-Group-5 Soil Mechanics Lab Experiment No. 4Document7 pagesTO1-Group-5 Soil Mechanics Lab Experiment No. 4Xam AcostaNo ratings yet
- Cryptography and Network Security: Fourth Edition by William StallingsDocument33 pagesCryptography and Network Security: Fourth Edition by William Stallingsprudhvi chowdaryNo ratings yet
- ISD1700 Design Guide - pdf1Document83 pagesISD1700 Design Guide - pdf1leomancaNo ratings yet
- Sony Bx1s Chassis Kv-Ar14m50 SMDocument195 pagesSony Bx1s Chassis Kv-Ar14m50 SMCube7 GeronimoNo ratings yet
- Delta-Star Connection of TransformerDocument9 pagesDelta-Star Connection of TransformernikolakaNo ratings yet
- Msunit 2 GraspsDocument6 pagesMsunit 2 Graspsapi-338845804No ratings yet
- 11N95 DGT PH2 DSDocument50 pages11N95 DGT PH2 DSSundar RamasamyNo ratings yet
- Electrical Installation and Maintenance (Eim) 5Document55 pagesElectrical Installation and Maintenance (Eim) 5Victor Rosales100% (1)
- HemantDocument22 pagesHemantJatin JakadNo ratings yet
- Fyp 1Document26 pagesFyp 1Taha RahatNo ratings yet
- Introduction To Computer MCQsDocument5 pagesIntroduction To Computer MCQsNoor KhanNo ratings yet
- PC 2201Document12 pagesPC 2201Irwan SamtaniNo ratings yet
- Running A Java Concurrent Program in Oracle AppsDocument6 pagesRunning A Java Concurrent Program in Oracle AppscvkrajNo ratings yet
- Therblig Chart (17 Motions)Document10 pagesTherblig Chart (17 Motions)Marianne Tajanlangit BebitNo ratings yet
- Chapter 06Document25 pagesChapter 06aclivisNo ratings yet
- Motion Canada - Bearing CatalogDocument212 pagesMotion Canada - Bearing CatalogEric Lafrance100% (1)
- Load Characterstics of DC Shunt GeneratorDocument2 pagesLoad Characterstics of DC Shunt Generatorravi12rNo ratings yet
- Archaeologia Bulgarica 2008 XII 2Document22 pagesArchaeologia Bulgarica 2008 XII 2Donka KolevaNo ratings yet
- Peter EnglandDocument29 pagesPeter EnglandANKITA CHANDEL0% (1)