Download as pdf or txt
You might also like
- A Requiem To Mother EarthDocument5 pagesA Requiem To Mother EarthSandra SabuNo ratings yet
- Epson 3800 3880 SMDocument306 pagesEpson 3800 3880 SMIon IonutNo ratings yet
- Leg Support Calculation PDFDocument2 pagesLeg Support Calculation PDFSanjay MoreNo ratings yet
- 208 - EC8391, EC6405 Control System Engineering - Important QuestionsDocument7 pages208 - EC8391, EC6405 Control System Engineering - Important QuestionsSagar Babu NandigamaNo ratings yet
- EC6405-Control Systems EngineeringDocument12 pagesEC6405-Control Systems EngineeringAnonymous XhmybK0% (1)
- QUESTION BANK of Control Systems Engineering PDFDocument12 pagesQUESTION BANK of Control Systems Engineering PDFMouhanit LimbachiyaNo ratings yet
- Kings: Department of Electronics and Communication EngineeringDocument12 pagesKings: Department of Electronics and Communication EngineeringLatosha FarrellNo ratings yet
- Control System Question BankDocument17 pagesControl System Question BankerrakeshagrawalNo ratings yet
- Control SystemsDocument10 pagesControl SystemsSagaraptor RexNo ratings yet
- IC6501-Control Systems EngineeringDocument16 pagesIC6501-Control Systems EngineeringrameshsmeNo ratings yet
- Control System Question BankDocument23 pagesControl System Question Bankdr mbaluNo ratings yet
- IC6501-Control Systems EngineeringDocument16 pagesIC6501-Control Systems EngineeringragupaNo ratings yet
- Control Systems IMP QUESTIONSDocument8 pagesControl Systems IMP QUESTIONSHarika HarikaNo ratings yet
- Control Systems - Question BankDocument6 pagesControl Systems - Question Bankmadhu balanNo ratings yet
- Control System (PT)Document7 pagesControl System (PT)MATHANKUMAR.SNo ratings yet
- EC6405 CS Question Bank FULLDocument84 pagesEC6405 CS Question Bank FULLreporterrajiniNo ratings yet
- Question Bank: Unit I Systems and Their RepresentationDocument6 pagesQuestion Bank: Unit I Systems and Their RepresentationramyakalaNo ratings yet
- Ce Cia1 QB Answer.Document38 pagesCe Cia1 QB Answer.hk3032004No ratings yet
- Kings: Question BankDocument12 pagesKings: Question BankdhayasathishNo ratings yet
- VI Sem ECEDocument12 pagesVI Sem ECESenthil Kumar KrishnanNo ratings yet
- II EceDocument16 pagesII EceAruna ChandranNo ratings yet
- EE8391 CSE IAT1 QB IIIyearDocument7 pagesEE8391 CSE IAT1 QB IIIyearOhmsakthi Vel RNo ratings yet
- 130403control System - Unit12Document4 pages130403control System - Unit12Nitin GoyalNo ratings yet
- Question BankDocument7 pagesQuestion BankAvinash ChauhanNo ratings yet
- Cs ImpDocument5 pagesCs ImpLiki LikithNo ratings yet
- Control EnggDocument8 pagesControl EnggNambi RajanNo ratings yet
- AE6505 Control EngineeringDocument9 pagesAE6505 Control Engineeringsathesh waranNo ratings yet
- Control Systems - PART - ADocument12 pagesControl Systems - PART - Aaarthir88100% (1)
- TUTORIAL 6 - System ResponseDocument15 pagesTUTORIAL 6 - System ResponsetiraNo ratings yet
- Dept of Aero: Unit I-Introduction PART - A (2 Marks)Document9 pagesDept of Aero: Unit I-Introduction PART - A (2 Marks)DeepakLingamoorthyNo ratings yet
- 9A02503 Control SystemsDocument4 pages9A02503 Control SystemssivabharathamurthyNo ratings yet
- Cse Question Bank Part BDocument5 pagesCse Question Bank Part Bbalaji1986No ratings yet
- Unit IDocument18 pagesUnit ILAKSHMI SNo ratings yet
- Control System Question BankDocument12 pagesControl System Question Banksagar R RaoNo ratings yet
- EC602 Control Q Bank 2023Document9 pagesEC602 Control Q Bank 2023ROHAN CHOWDHURYNo ratings yet
- Control System Short Answer Type QuestionsDocument1 pageControl System Short Answer Type QuestionsAlka GoyalNo ratings yet
- II B. Tech II Semester II B. Tech II Semester Regular Examinations August - 2014 Control Systems 2014Document8 pagesII B. Tech II Semester II B. Tech II Semester Regular Examinations August - 2014 Control Systems 2014Sandeep YandamuriNo ratings yet
- 6.control System EngineeringDocument11 pages6.control System EngineeringAnonymous 1Xx4mQcqeTNo ratings yet
- TE 2019 MechatronicsDocument6 pagesTE 2019 MechatronicsVishalNo ratings yet
- Digital Control Engineering Model Question PaperDocument5 pagesDigital Control Engineering Model Question PaperCyril Robinson Azariah JohnNo ratings yet
- LDCS QuestionsDocument10 pagesLDCS QuestionsRiya SinghNo ratings yet
- Control System 16 MarksDocument3 pagesControl System 16 MarksmuthurajNo ratings yet
- Control Syst Test IDocument4 pagesControl Syst Test IreporterrajiniNo ratings yet
- 4 ECE EC 2255 Control SystemDocument2 pages4 ECE EC 2255 Control SystemBIBIN CHIDAMBARANATHANNo ratings yet
- Linear Control Engineering QBDocument11 pagesLinear Control Engineering QBAkizuki TakaoNo ratings yet
- Model Examination: Hindusthan Institute of Technology, CoimbatoreDocument6 pagesModel Examination: Hindusthan Institute of Technology, CoimbatoreParama GuruNo ratings yet
- II B.Tech II Semester, Regular Examinations, April/May - 2012 Control SystemsDocument8 pagesII B.Tech II Semester, Regular Examinations, April/May - 2012 Control SystemsViswa ChaitanyaNo ratings yet
- Control Systems Unitwise Important Questions Unit 1 Part ADocument10 pagesControl Systems Unitwise Important Questions Unit 1 Part AChandra shekarNo ratings yet
- PTEE7301 April-2021Document2 pagesPTEE7301 April-2021imman46920No ratings yet
- 3cs EceDocument3 pages3cs Ecekirankumar412No ratings yet
- DC MachinesDocument3 pagesDC Machines19euec154 - SUDARSAN PERUMAL VNo ratings yet
- Iv Semester Ece 21ec45tDocument3 pagesIv Semester Ece 21ec45tM.N.MD. FaheemNo ratings yet
- New Microsoft Office Word DocumentDocument1 pageNew Microsoft Office Word Documentkainsu12No ratings yet
- Kings: Department of Electronics and Communication Engineering Question BankDocument12 pagesKings: Department of Electronics and Communication Engineering Question Banks.reeganNo ratings yet
- Control SystemsDocument8 pagesControl SystemsammukeeruNo ratings yet
- EEN 407 Sample QuestionsDocument41 pagesEEN 407 Sample QuestionsAbu SiddiqueNo ratings yet
- Control System 2MARKSDocument16 pagesControl System 2MARKSSeekay Alais Karuppaiah CNo ratings yet
- Control SystemDocument2 pagesControl Systemguru.rjpmNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Apspdcl Yamini New 1Document1 pageApspdcl Yamini New 1Krishna Reddy Y.VNo ratings yet
- SPDCL1Document1 pageSPDCL1Krishna Reddy Y.VNo ratings yet
- Apspdcl SowmyaDocument1 pageApspdcl SowmyaKrishna Reddy Y.VNo ratings yet
- Apspdcl S. GayathriDocument1 pageApspdcl S. GayathriKrishna Reddy Y.VNo ratings yet
- Apspdcl AkhilaDocument1 pageApspdcl AkhilaKrishna Reddy Y.VNo ratings yet
- SPDCLDocument1 pageSPDCLKrishna Reddy Y.VNo ratings yet
- Website Design SoftDocument1 pageWebsite Design SoftKrishna Reddy Y.VNo ratings yet
- Small Satelite DesignDocument1 pageSmall Satelite DesignKrishna Reddy Y.VNo ratings yet
- APSPDCLDocument1 pageAPSPDCLKrishna Reddy Y.VNo ratings yet
- Apc R19 Assignemnt For Mid 2Document8 pagesApc R19 Assignemnt For Mid 2Krishna Reddy Y.VNo ratings yet
- TY Control SystemDocument14 pagesTY Control SystemKrishna Reddy Y.VNo ratings yet
- Graph TheoryDocument84 pagesGraph TheoryKrishna Reddy Y.VNo ratings yet
- UNIT-I RelaysDocument159 pagesUNIT-I RelaysKrishna Reddy Y.VNo ratings yet
- Graph Theory ModifiedDocument83 pagesGraph Theory ModifiedKrishna Reddy Y.VNo ratings yet
- Three Phase CircuitsDocument17 pagesThree Phase CircuitsKrishna Reddy Y.VNo ratings yet
- A Clinical Audit Into The Success Rate of Inferior Alveolar Nerve Block Analgesia in General Dental PracticeDocument4 pagesA Clinical Audit Into The Success Rate of Inferior Alveolar Nerve Block Analgesia in General Dental PracticeGina CastilloNo ratings yet
- Question: Consider A Point in A Structural Member That Is Subjected To PLDocument1 pageQuestion: Consider A Point in A Structural Member That Is Subjected To PLTekin EnerjiNo ratings yet
- Schiavi Enc Met Page015Document1 pageSchiavi Enc Met Page015Adel AdelNo ratings yet
- Owner: PT. Baker Hughes User: Cok Gede Reza Description: Modified Safety Pin, Add. Handrail & Add. Anti Slip Step Stair at Pressure Test BayDocument3 pagesOwner: PT. Baker Hughes User: Cok Gede Reza Description: Modified Safety Pin, Add. Handrail & Add. Anti Slip Step Stair at Pressure Test BayMuhammad AlpianNo ratings yet
- MCQ - AcousticsDocument16 pagesMCQ - AcousticsRomeo Espenida0% (1)
- Data Transformation by Andy FieldDocument1 pageData Transformation by Andy FieldGon MartNo ratings yet
- Ciarrochi Fisher and Lane Link Between Values and Well-Being Among People With Cancer 2010 Psycho OncologyDocument9 pagesCiarrochi Fisher and Lane Link Between Values and Well-Being Among People With Cancer 2010 Psycho OncologyJuan C. VargasNo ratings yet
- Synchronous Generators: Instructional ObjectivesDocument18 pagesSynchronous Generators: Instructional Objectivessanthosh2009No ratings yet
- LAB 2 - Running Speed (Method 2) OEL 1Document3 pagesLAB 2 - Running Speed (Method 2) OEL 1ZULFAQAR BIN MOHAMMAD NIZAMNo ratings yet
- HwyconstDocument23 pagesHwyconstAmulie JarjuseyNo ratings yet
- Filipino BasicDocument21 pagesFilipino BasicReiko Nakayama100% (1)
- Macro Chapter 7Document12 pagesMacro Chapter 7Mary Jane PelaezNo ratings yet
- Premium HC: 120 Halfcell Monocrystalline High Performance Solar ModuleDocument2 pagesPremium HC: 120 Halfcell Monocrystalline High Performance Solar ModuleMujahed Al-HamatiNo ratings yet
- Make List SLTD-J-1401-L-6-00003-02Document4 pagesMake List SLTD-J-1401-L-6-00003-02tribhuvan ShankarNo ratings yet
- Likedislikedon't LikeDocument3 pagesLikedislikedon't LikeBriza PaolaNo ratings yet
- Ultimate GuideDocument11 pagesUltimate GuideIgor SucevicNo ratings yet
- DC Jow Ga Beginner CurriculumDocument2 pagesDC Jow Ga Beginner CurriculumKevinNo ratings yet
- Anjana Seminar SlideshareDocument38 pagesAnjana Seminar SlideshareAnjana kpNo ratings yet
- TapingDocument3 pagesTapingEdeza MatarumNo ratings yet
- A. Title of Experiment B. Date and Time of Experiment: Wednesday, 10Document15 pagesA. Title of Experiment B. Date and Time of Experiment: Wednesday, 10LichaNo ratings yet
- Hilton Chapter 5 Adobe Connect Activity-Based Costing and ManagementDocument11 pagesHilton Chapter 5 Adobe Connect Activity-Based Costing and ManagementyosepjoltNo ratings yet
- Federal MogulDocument277 pagesFederal Mogulعبدالغني القباطي100% (1)
- Coal Ash Dewatering SolutionDocument23 pagesCoal Ash Dewatering Solution류태하No ratings yet
- Jewellery Shop Design 3dDocument5 pagesJewellery Shop Design 3dTrường Thọ NguyễnNo ratings yet
- CWAG Rectangular CoordinatesDocument52 pagesCWAG Rectangular CoordinatesRolando MerleNo ratings yet
- Costing By-Product and Joint ProductsDocument36 pagesCosting By-Product and Joint ProductseltantiNo ratings yet
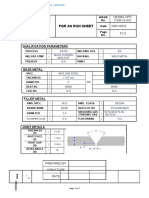
- PQR As Run SheetDocument2 pagesPQR As Run SheetAhmed ElsharkawNo ratings yet