
Set 2 2022 Mech Solutions
Set 2 2022 Mech Solutions
You might also like
- Mechanics Formula SheetDocument2 pagesMechanics Formula SheetDax1647100% (2)
- Massachusetts Institute of Technology Opencourseware 8.03Sc Fall 2012 Problem Set #5 SolutionsDocument8 pagesMassachusetts Institute of Technology Opencourseware 8.03Sc Fall 2012 Problem Set #5 SolutionsTushar ShrimaliNo ratings yet
- Hw3sol 21015 PDFDocument13 pagesHw3sol 21015 PDFPei JingNo ratings yet
- 16Document18 pages16Elzimar FreitasNo ratings yet
- Chapter 2: One-Dimensional Kinematics: Av AvDocument3 pagesChapter 2: One-Dimensional Kinematics: Av AvVivian DoanNo ratings yet
- 1130 Formula Sheet F 20Document2 pages1130 Formula Sheet F 20gooseNo ratings yet
- Equation Sheet 231 PhysicsDocument2 pagesEquation Sheet 231 PhysicsAshlie PolancoNo ratings yet
- Physics I: Tudor Ciobanu, s184476, GE2018 November 2018Document8 pagesPhysics I: Tudor Ciobanu, s184476, GE2018 November 2018CiobanuTudorNo ratings yet
- Phys 130 Formula Sheet V2Document2 pagesPhys 130 Formula Sheet V2rwopara2007No ratings yet
- Practice Final Exam - SolutionsDocument8 pagesPractice Final Exam - SolutionsNALUGOODHA MUSANo ratings yet
- Cvit FT Derivation PDFDocument2 pagesCvit FT Derivation PDFBlazeBlack54No ratings yet
- Cvit FT Derivation PDFDocument2 pagesCvit FT Derivation PDFkrishnaNo ratings yet
- Formula SheetDocument7 pagesFormula SheetFelipe RincónNo ratings yet
- STEM FormulaDocument6 pagesSTEM Formulahue hueNo ratings yet
- HW 4 SolutionsDocument5 pagesHW 4 SolutionsKiran AdhikariNo ratings yet
- Midterm Review PDFDocument16 pagesMidterm Review PDFMt RushNo ratings yet
- Assignment in Advanced Quantum MechanicsDocument2 pagesAssignment in Advanced Quantum MechanicsdivyaNo ratings yet
- Phys 104 Practice Midterm SolutionsDocument5 pagesPhys 104 Practice Midterm SolutionsHenry JurneyNo ratings yet
- ¨x +W cos w ˙x sin w 1− (ζ) = = ˙ sin W: Mechanical Vibration (List Of Formula)Document3 pages¨x +W cos w ˙x sin w 1− (ζ) = = ˙ sin W: Mechanical Vibration (List Of Formula)Mohd Khairul FahmiNo ratings yet
- Physics FormulasDocument1 pagePhysics FormulasspinfxNo ratings yet
- Module 2 Week 7 - Harmonic VibrationDocument17 pagesModule 2 Week 7 - Harmonic VibrationNathaniel BaguioNo ratings yet
- Geometry On A Monge Patch: - by Benny Van Zuiden - 15 - February - 2012Document10 pagesGeometry On A Monge Patch: - by Benny Van Zuiden - 15 - February - 2012ascaniobaNo ratings yet
- Beams, Frames and Torsion Elements - March2020Document22 pagesBeams, Frames and Torsion Elements - March2020Dr P Ravinder ReddyNo ratings yet
- Mathematical Modeling and Computation in FinanceDocument3 pagesMathematical Modeling and Computation in FinanceĐạo Ninh ViệtNo ratings yet
- FormulaDocument2 pagesFormulaAshley DeborahNo ratings yet
- Interesting Integral: SolutionDocument2 pagesInteresting Integral: SolutionJoseNo ratings yet
- FIZ272E Reminder SheetDocument1 pageFIZ272E Reminder Sheetrand.variableNo ratings yet
- Goldstein 19 24 25Document9 pagesGoldstein 19 24 25bgiangre8372100% (1)
- Formula Sheet MechanicsDocument2 pagesFormula Sheet Mechanicscarolinebrongelcopti24No ratings yet
- Fundamental of Physics Cheat SheetDocument4 pagesFundamental of Physics Cheat SheetMohamed MohamedNo ratings yet
- X (T) X (N) : (Quantization Step Q)Document5 pagesX (T) X (N) : (Quantization Step Q)StephAhnNo ratings yet
- Graphical Representation: Yvst: Motion of A Single Point in The MediumDocument7 pagesGraphical Representation: Yvst: Motion of A Single Point in The MediumManas kumarNo ratings yet
- 2pc Cálculo Integral Fim 3Document7 pages2pc Cálculo Integral Fim 3Hafiz IqbalNo ratings yet
- Test 1: Questions (Overleaf)Document3 pagesTest 1: Questions (Overleaf)AsdsaNo ratings yet
- HW 4Document1 pageHW 4PY WongNo ratings yet
- Differential Equations - Solved Assignments - Semester Fall 2006Document46 pagesDifferential Equations - Solved Assignments - Semester Fall 2006Muhammad UmairNo ratings yet
- Physics1 1st Periodicals FormulasDocument1 pagePhysics1 1st Periodicals FormulasFREDDIE BISQUERA IINo ratings yet
- Engineering Analysis Homework 11Document5 pagesEngineering Analysis Homework 11AmritaNo ratings yet
- Lecture 3:4 (Part 2)Document8 pagesLecture 3:4 (Part 2)danNo ratings yet
- 10 - Bivariate DistributionsDocument10 pages10 - Bivariate DistributionsHarsha SawNo ratings yet
- Fysikk Tabell UK 2015-2016Document2 pagesFysikk Tabell UK 2015-2016Maga KhadisovNo ratings yet
- Energy & Variational Methods: MEEN 618Document2 pagesEnergy & Variational Methods: MEEN 618KrishnaKaushik100% (1)
- Single-Degree-of-Freedom (Single DOF) Linear SystemDocument14 pagesSingle-Degree-of-Freedom (Single DOF) Linear SystemWintWintKhineNo ratings yet
- Potd 335 4Document2 pagesPotd 335 4Aryan SaxenaNo ratings yet
- IMC 2017 - Day 2 (Problems and Solutions)Document5 pagesIMC 2017 - Day 2 (Problems and Solutions)Slamet RaharjaNo ratings yet
- Phy 158: Mathematics For Physics Tutorial One: Dorcas Attuabea Addo February 3, 2020Document11 pagesPhy 158: Mathematics For Physics Tutorial One: Dorcas Attuabea Addo February 3, 2020Tommy ChrisNo ratings yet
- Greens TheoremDocument20 pagesGreens TheoremAnupam ChakrabortyNo ratings yet
- Differential CalculusDocument28 pagesDifferential CalculusRaju SinghNo ratings yet
- Integration. Exercise 1Document8 pagesIntegration. Exercise 1HeldzistNo ratings yet
- Introduction To Mellin Transforms Part - 01Document5 pagesIntroduction To Mellin Transforms Part - 01Shivam SharmaNo ratings yet
- Fourier Series and Simple Applications: Rahul SinghDocument7 pagesFourier Series and Simple Applications: Rahul SinghRahul Yogendra SinghNo ratings yet
- Prova 3 Calculo 2Document3 pagesProva 3 Calculo 2Lucas AmaralNo ratings yet
- Lecture 2 - Modelling of Mechanical Systems - Part A: Last TimeDocument8 pagesLecture 2 - Modelling of Mechanical Systems - Part A: Last TimeLE NgocNo ratings yet
- Demostracion de La Funcion de Densidad DDocument25 pagesDemostracion de La Funcion de Densidad DJose ramon cornelio torresNo ratings yet
- 2.4.1 Length of A Plane Curve - NotesDocument5 pages2.4.1 Length of A Plane Curve - NotesKelseyNo ratings yet
- CH 7Document6 pagesCH 7Web devNo ratings yet
- Controls Combined Lecture NotesDocument312 pagesControls Combined Lecture NotesA FNo ratings yet
- Deflection1 PDFDocument17 pagesDeflection1 PDFKandee Marie ApiNo ratings yet
- A Note On Univariate Ito'S Lemma: 1 2 F D HxiDocument2 pagesA Note On Univariate Ito'S Lemma: 1 2 F D HxijeanboncruNo ratings yet
- MIT8 03SCF16 Lec6 PDFDocument5 pagesMIT8 03SCF16 Lec6 PDFRohan JoshiNo ratings yet
- Course OutlineDocument5 pagesCourse OutlineCb MajorNo ratings yet
- APHG Exam Question 2Document1 pageAPHG Exam Question 2Cb MajorNo ratings yet
- APHG Exam Question 1 3Document1 pageAPHG Exam Question 1 3Cb MajorNo ratings yet
- Excerpt From Americanah by Chimamanda Ngozi AdichieDocument1 pageExcerpt From Americanah by Chimamanda Ngozi AdichieCb MajorNo ratings yet
- AP Lit - Biblical Allusions and GrecoDocument1 pageAP Lit - Biblical Allusions and GrecoCb MajorNo ratings yet
- AP Literature Book ListDocument13 pagesAP Literature Book ListCb MajorNo ratings yet
- Black Belt Club Schedule: Z Zoom Online Classes 40 Min ClassDocument2 pagesBlack Belt Club Schedule: Z Zoom Online Classes 40 Min ClassCb MajorNo ratings yet
- Work and PowerDocument20 pagesWork and PowernathanNo ratings yet
- General Organic and Biological Chemistry 7th Edition Stoker Test BankDocument15 pagesGeneral Organic and Biological Chemistry 7th Edition Stoker Test Bankjacobmoralesynjdpksxob100% (29)
- CIVE1129 Course Guide Part BDocument3 pagesCIVE1129 Course Guide Part BMike ChanNo ratings yet
- Pp-Soil Origin and DevelopmentDocument176 pagesPp-Soil Origin and DevelopmentNelzen GarayNo ratings yet
- SPARK STAR-24 Impedance Fault 33 KVDocument3 pagesSPARK STAR-24 Impedance Fault 33 KVRam Dhani YadavNo ratings yet
- Combined Cycle HRSG and Balance of Plant - Program 88Document10 pagesCombined Cycle HRSG and Balance of Plant - Program 88arif ihwandaNo ratings yet
- The Detonation Properties of Combined Effects ExplosivesDocument6 pagesThe Detonation Properties of Combined Effects ExplosivesKay WhiteNo ratings yet
- 64e5dc2869da7300189c1ce0 - ## - Magnet by Sumit Shukla SirDocument2 pages64e5dc2869da7300189c1ce0 - ## - Magnet by Sumit Shukla Sirrajnishk126No ratings yet
- JOSE LUIS LARA Design and Operational Experience of The Cerro Lindo Filtered Tailings Deposit PASTE 2011Document14 pagesJOSE LUIS LARA Design and Operational Experience of The Cerro Lindo Filtered Tailings Deposit PASTE 2011John PaulNo ratings yet
- Quiz - Chapter 1Document4 pagesQuiz - Chapter 1dNo ratings yet
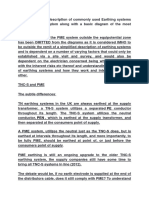
- A Simplified Description of Commonly Used Earthing Systems in The United KingdomDocument3 pagesA Simplified Description of Commonly Used Earthing Systems in The United KingdomRajendra Prasad ShuklaNo ratings yet
- Borgianni, de Filippis - Gasification Process of Wastes Containing PVCDocument7 pagesBorgianni, de Filippis - Gasification Process of Wastes Containing PVCJorge VeraNo ratings yet
- On The Origin of Species: Charles Robert DarwinDocument1 pageOn The Origin of Species: Charles Robert DarwinNonna TîmburNo ratings yet
- Flood (Report Text)Document2 pagesFlood (Report Text)Abimanyu Ajipangestu0% (2)
- ElektraDocument2 pagesElektraLeela KrishnaNo ratings yet
- Table of Specification Science 7Document1 pageTable of Specification Science 7rose eden cabalonga100% (1)
- Material Safety Data Sheet: Effective Date 02/23/2009Document7 pagesMaterial Safety Data Sheet: Effective Date 02/23/2009KhaledNo ratings yet
- Biodiversity and Healthy Society: Lesson ObjectivesDocument11 pagesBiodiversity and Healthy Society: Lesson ObjectivesJamesel VillaruzNo ratings yet
- Energy Scientific Method Teachers Guide Discovery EducationDocument23 pagesEnergy Scientific Method Teachers Guide Discovery EducationKari Kristine Hoskins BarreraNo ratings yet
- Earths Climate Past and Future 3rd Edition by Ruddiman ISBN Test BankDocument7 pagesEarths Climate Past and Future 3rd Edition by Ruddiman ISBN Test Banksteven100% (32)
- Sabo DamDocument2 pagesSabo DamGina Rizka AmaliaNo ratings yet
- Module 5 6 EcosystemDocument3 pagesModule 5 6 Ecosystemaatorrico5967qcNo ratings yet
- Physical Constants PDFDocument2 pagesPhysical Constants PDFElizebethNo ratings yet
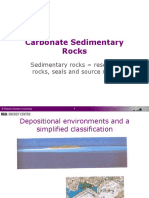
- Carbonate Sedimentary Rocks - Slides v0Document35 pagesCarbonate Sedimentary Rocks - Slides v0ArsalanNo ratings yet
- Density-Neutron LogsDocument19 pagesDensity-Neutron LogsRival Ibnu SinaNo ratings yet
- Stitt Afghanistan Geology 07 Carboniferous 1Document13 pagesStitt Afghanistan Geology 07 Carboniferous 1Len StittNo ratings yet
- Early Warning System of Ciliwung River FloodsDocument27 pagesEarly Warning System of Ciliwung River FloodsHouw Liong TheNo ratings yet
- Mercury Treatment Options For LNGDocument5 pagesMercury Treatment Options For LNGamitNo ratings yet






























































































Download as pdf or txt
You might also like
- Mechanics Formula SheetDocument2 pagesMechanics Formula SheetDax1647100% (2)
- Massachusetts Institute of Technology Opencourseware 8.03Sc Fall 2012 Problem Set #5 SolutionsDocument8 pagesMassachusetts Institute of Technology Opencourseware 8.03Sc Fall 2012 Problem Set #5 SolutionsTushar ShrimaliNo ratings yet
- Hw3sol 21015 PDFDocument13 pagesHw3sol 21015 PDFPei JingNo ratings yet
- 16Document18 pages16Elzimar FreitasNo ratings yet
- Chapter 2: One-Dimensional Kinematics: Av AvDocument3 pagesChapter 2: One-Dimensional Kinematics: Av AvVivian DoanNo ratings yet
- 1130 Formula Sheet F 20Document2 pages1130 Formula Sheet F 20gooseNo ratings yet
- Equation Sheet 231 PhysicsDocument2 pagesEquation Sheet 231 PhysicsAshlie PolancoNo ratings yet
- Physics I: Tudor Ciobanu, s184476, GE2018 November 2018Document8 pagesPhysics I: Tudor Ciobanu, s184476, GE2018 November 2018CiobanuTudorNo ratings yet
- Phys 130 Formula Sheet V2Document2 pagesPhys 130 Formula Sheet V2rwopara2007No ratings yet
- Practice Final Exam - SolutionsDocument8 pagesPractice Final Exam - SolutionsNALUGOODHA MUSANo ratings yet
- Cvit FT Derivation PDFDocument2 pagesCvit FT Derivation PDFBlazeBlack54No ratings yet
- Cvit FT Derivation PDFDocument2 pagesCvit FT Derivation PDFkrishnaNo ratings yet
- Formula SheetDocument7 pagesFormula SheetFelipe RincónNo ratings yet
- STEM FormulaDocument6 pagesSTEM Formulahue hueNo ratings yet
- HW 4 SolutionsDocument5 pagesHW 4 SolutionsKiran AdhikariNo ratings yet
- Midterm Review PDFDocument16 pagesMidterm Review PDFMt RushNo ratings yet
- Assignment in Advanced Quantum MechanicsDocument2 pagesAssignment in Advanced Quantum MechanicsdivyaNo ratings yet
- Phys 104 Practice Midterm SolutionsDocument5 pagesPhys 104 Practice Midterm SolutionsHenry JurneyNo ratings yet
- ¨x +W cos w ˙x sin w 1− (ζ) = = ˙ sin W: Mechanical Vibration (List Of Formula)Document3 pages¨x +W cos w ˙x sin w 1− (ζ) = = ˙ sin W: Mechanical Vibration (List Of Formula)Mohd Khairul FahmiNo ratings yet
- Physics FormulasDocument1 pagePhysics FormulasspinfxNo ratings yet
- Module 2 Week 7 - Harmonic VibrationDocument17 pagesModule 2 Week 7 - Harmonic VibrationNathaniel BaguioNo ratings yet
- Geometry On A Monge Patch: - by Benny Van Zuiden - 15 - February - 2012Document10 pagesGeometry On A Monge Patch: - by Benny Van Zuiden - 15 - February - 2012ascaniobaNo ratings yet
- Beams, Frames and Torsion Elements - March2020Document22 pagesBeams, Frames and Torsion Elements - March2020Dr P Ravinder ReddyNo ratings yet
- Mathematical Modeling and Computation in FinanceDocument3 pagesMathematical Modeling and Computation in FinanceĐạo Ninh ViệtNo ratings yet
- FormulaDocument2 pagesFormulaAshley DeborahNo ratings yet
- Interesting Integral: SolutionDocument2 pagesInteresting Integral: SolutionJoseNo ratings yet
- FIZ272E Reminder SheetDocument1 pageFIZ272E Reminder Sheetrand.variableNo ratings yet
- Goldstein 19 24 25Document9 pagesGoldstein 19 24 25bgiangre8372100% (1)
- Formula Sheet MechanicsDocument2 pagesFormula Sheet Mechanicscarolinebrongelcopti24No ratings yet
- Fundamental of Physics Cheat SheetDocument4 pagesFundamental of Physics Cheat SheetMohamed MohamedNo ratings yet
- X (T) X (N) : (Quantization Step Q)Document5 pagesX (T) X (N) : (Quantization Step Q)StephAhnNo ratings yet
- Graphical Representation: Yvst: Motion of A Single Point in The MediumDocument7 pagesGraphical Representation: Yvst: Motion of A Single Point in The MediumManas kumarNo ratings yet
- 2pc Cálculo Integral Fim 3Document7 pages2pc Cálculo Integral Fim 3Hafiz IqbalNo ratings yet
- Test 1: Questions (Overleaf)Document3 pagesTest 1: Questions (Overleaf)AsdsaNo ratings yet
- HW 4Document1 pageHW 4PY WongNo ratings yet
- Differential Equations - Solved Assignments - Semester Fall 2006Document46 pagesDifferential Equations - Solved Assignments - Semester Fall 2006Muhammad UmairNo ratings yet
- Physics1 1st Periodicals FormulasDocument1 pagePhysics1 1st Periodicals FormulasFREDDIE BISQUERA IINo ratings yet
- Engineering Analysis Homework 11Document5 pagesEngineering Analysis Homework 11AmritaNo ratings yet
- Lecture 3:4 (Part 2)Document8 pagesLecture 3:4 (Part 2)danNo ratings yet
- 10 - Bivariate DistributionsDocument10 pages10 - Bivariate DistributionsHarsha SawNo ratings yet
- Fysikk Tabell UK 2015-2016Document2 pagesFysikk Tabell UK 2015-2016Maga KhadisovNo ratings yet
- Energy & Variational Methods: MEEN 618Document2 pagesEnergy & Variational Methods: MEEN 618KrishnaKaushik100% (1)
- Single-Degree-of-Freedom (Single DOF) Linear SystemDocument14 pagesSingle-Degree-of-Freedom (Single DOF) Linear SystemWintWintKhineNo ratings yet
- Potd 335 4Document2 pagesPotd 335 4Aryan SaxenaNo ratings yet
- IMC 2017 - Day 2 (Problems and Solutions)Document5 pagesIMC 2017 - Day 2 (Problems and Solutions)Slamet RaharjaNo ratings yet
- Phy 158: Mathematics For Physics Tutorial One: Dorcas Attuabea Addo February 3, 2020Document11 pagesPhy 158: Mathematics For Physics Tutorial One: Dorcas Attuabea Addo February 3, 2020Tommy ChrisNo ratings yet
- Greens TheoremDocument20 pagesGreens TheoremAnupam ChakrabortyNo ratings yet
- Differential CalculusDocument28 pagesDifferential CalculusRaju SinghNo ratings yet
- Integration. Exercise 1Document8 pagesIntegration. Exercise 1HeldzistNo ratings yet
- Introduction To Mellin Transforms Part - 01Document5 pagesIntroduction To Mellin Transforms Part - 01Shivam SharmaNo ratings yet
- Fourier Series and Simple Applications: Rahul SinghDocument7 pagesFourier Series and Simple Applications: Rahul SinghRahul Yogendra SinghNo ratings yet
- Prova 3 Calculo 2Document3 pagesProva 3 Calculo 2Lucas AmaralNo ratings yet
- Lecture 2 - Modelling of Mechanical Systems - Part A: Last TimeDocument8 pagesLecture 2 - Modelling of Mechanical Systems - Part A: Last TimeLE NgocNo ratings yet
- Demostracion de La Funcion de Densidad DDocument25 pagesDemostracion de La Funcion de Densidad DJose ramon cornelio torresNo ratings yet
- 2.4.1 Length of A Plane Curve - NotesDocument5 pages2.4.1 Length of A Plane Curve - NotesKelseyNo ratings yet
- CH 7Document6 pagesCH 7Web devNo ratings yet
- Controls Combined Lecture NotesDocument312 pagesControls Combined Lecture NotesA FNo ratings yet
- Deflection1 PDFDocument17 pagesDeflection1 PDFKandee Marie ApiNo ratings yet
- A Note On Univariate Ito'S Lemma: 1 2 F D HxiDocument2 pagesA Note On Univariate Ito'S Lemma: 1 2 F D HxijeanboncruNo ratings yet
- MIT8 03SCF16 Lec6 PDFDocument5 pagesMIT8 03SCF16 Lec6 PDFRohan JoshiNo ratings yet
- Course OutlineDocument5 pagesCourse OutlineCb MajorNo ratings yet
- APHG Exam Question 2Document1 pageAPHG Exam Question 2Cb MajorNo ratings yet
- APHG Exam Question 1 3Document1 pageAPHG Exam Question 1 3Cb MajorNo ratings yet
- Excerpt From Americanah by Chimamanda Ngozi AdichieDocument1 pageExcerpt From Americanah by Chimamanda Ngozi AdichieCb MajorNo ratings yet
- AP Lit - Biblical Allusions and GrecoDocument1 pageAP Lit - Biblical Allusions and GrecoCb MajorNo ratings yet
- AP Literature Book ListDocument13 pagesAP Literature Book ListCb MajorNo ratings yet
- Black Belt Club Schedule: Z Zoom Online Classes 40 Min ClassDocument2 pagesBlack Belt Club Schedule: Z Zoom Online Classes 40 Min ClassCb MajorNo ratings yet
- Work and PowerDocument20 pagesWork and PowernathanNo ratings yet
- General Organic and Biological Chemistry 7th Edition Stoker Test BankDocument15 pagesGeneral Organic and Biological Chemistry 7th Edition Stoker Test Bankjacobmoralesynjdpksxob100% (29)
- CIVE1129 Course Guide Part BDocument3 pagesCIVE1129 Course Guide Part BMike ChanNo ratings yet
- Pp-Soil Origin and DevelopmentDocument176 pagesPp-Soil Origin and DevelopmentNelzen GarayNo ratings yet
- SPARK STAR-24 Impedance Fault 33 KVDocument3 pagesSPARK STAR-24 Impedance Fault 33 KVRam Dhani YadavNo ratings yet
- Combined Cycle HRSG and Balance of Plant - Program 88Document10 pagesCombined Cycle HRSG and Balance of Plant - Program 88arif ihwandaNo ratings yet
- The Detonation Properties of Combined Effects ExplosivesDocument6 pagesThe Detonation Properties of Combined Effects ExplosivesKay WhiteNo ratings yet
- 64e5dc2869da7300189c1ce0 - ## - Magnet by Sumit Shukla SirDocument2 pages64e5dc2869da7300189c1ce0 - ## - Magnet by Sumit Shukla Sirrajnishk126No ratings yet
- JOSE LUIS LARA Design and Operational Experience of The Cerro Lindo Filtered Tailings Deposit PASTE 2011Document14 pagesJOSE LUIS LARA Design and Operational Experience of The Cerro Lindo Filtered Tailings Deposit PASTE 2011John PaulNo ratings yet
- Quiz - Chapter 1Document4 pagesQuiz - Chapter 1dNo ratings yet
- A Simplified Description of Commonly Used Earthing Systems in The United KingdomDocument3 pagesA Simplified Description of Commonly Used Earthing Systems in The United KingdomRajendra Prasad ShuklaNo ratings yet
- Borgianni, de Filippis - Gasification Process of Wastes Containing PVCDocument7 pagesBorgianni, de Filippis - Gasification Process of Wastes Containing PVCJorge VeraNo ratings yet
- On The Origin of Species: Charles Robert DarwinDocument1 pageOn The Origin of Species: Charles Robert DarwinNonna TîmburNo ratings yet
- Flood (Report Text)Document2 pagesFlood (Report Text)Abimanyu Ajipangestu0% (2)
- ElektraDocument2 pagesElektraLeela KrishnaNo ratings yet
- Table of Specification Science 7Document1 pageTable of Specification Science 7rose eden cabalonga100% (1)
- Material Safety Data Sheet: Effective Date 02/23/2009Document7 pagesMaterial Safety Data Sheet: Effective Date 02/23/2009KhaledNo ratings yet
- Biodiversity and Healthy Society: Lesson ObjectivesDocument11 pagesBiodiversity and Healthy Society: Lesson ObjectivesJamesel VillaruzNo ratings yet
- Energy Scientific Method Teachers Guide Discovery EducationDocument23 pagesEnergy Scientific Method Teachers Guide Discovery EducationKari Kristine Hoskins BarreraNo ratings yet
- Earths Climate Past and Future 3rd Edition by Ruddiman ISBN Test BankDocument7 pagesEarths Climate Past and Future 3rd Edition by Ruddiman ISBN Test Banksteven100% (32)
- Sabo DamDocument2 pagesSabo DamGina Rizka AmaliaNo ratings yet
- Module 5 6 EcosystemDocument3 pagesModule 5 6 Ecosystemaatorrico5967qcNo ratings yet
- Physical Constants PDFDocument2 pagesPhysical Constants PDFElizebethNo ratings yet
- Carbonate Sedimentary Rocks - Slides v0Document35 pagesCarbonate Sedimentary Rocks - Slides v0ArsalanNo ratings yet
- Density-Neutron LogsDocument19 pagesDensity-Neutron LogsRival Ibnu SinaNo ratings yet
- Stitt Afghanistan Geology 07 Carboniferous 1Document13 pagesStitt Afghanistan Geology 07 Carboniferous 1Len StittNo ratings yet
- Early Warning System of Ciliwung River FloodsDocument27 pagesEarly Warning System of Ciliwung River FloodsHouw Liong TheNo ratings yet
- Mercury Treatment Options For LNGDocument5 pagesMercury Treatment Options For LNGamitNo ratings yet