Download as pdf or txt
You might also like
- G Arken Solutions-Problemas ResueltosDocument754 pagesG Arken Solutions-Problemas ResueltosZer0kun100% (10)
- Sneddon 1965Document11 pagesSneddon 1965Valantis TsinginosNo ratings yet
- Fabrication of Pneumatic Punching and Riveting MachineDocument45 pagesFabrication of Pneumatic Punching and Riveting MachineElakkiya Karthic100% (7)
- Aero Modeller 2016-11Document68 pagesAero Modeller 2016-11CB100% (2)
- Numerical Computation July 30, 2012Document7 pagesNumerical Computation July 30, 2012Damian ButtsNo ratings yet
- VolumequickDocument21 pagesVolumequickHiGrill25No ratings yet
- Inequalities Between Volume, Center of Mass, Circumscribed Radius, Order, and Mean CurvatureDocument12 pagesInequalities Between Volume, Center of Mass, Circumscribed Radius, Order, and Mean CurvaturePippo MiriNo ratings yet
- Homework 5Document4 pagesHomework 5Ale Gomez100% (6)
- Conformal Deformation of A Riemannian Metric To Constant Scalar CurvatureDocument18 pagesConformal Deformation of A Riemannian Metric To Constant Scalar CurvatureAmy CaseNo ratings yet
- 17 - 2mm KKDocument17 pages17 - 2mm KKkazi wahexNo ratings yet
- On The Asymptotic Enumeration of Accessible Automata: Elcio LebensztaynDocument6 pagesOn The Asymptotic Enumeration of Accessible Automata: Elcio LebensztaynGrcak92No ratings yet
- Lecture Notes For MA5NO Cohomology, Connections, Curvature and Characteristic ClassesDocument66 pagesLecture Notes For MA5NO Cohomology, Connections, Curvature and Characteristic ClassesSrinivas RauNo ratings yet
- Ar Ve Son Spectral SolutionsDocument43 pagesAr Ve Son Spectral Solutionssticker592100% (1)
- On The Determination of Stress Concentration in A Stretched Plate With Two HolesDocument17 pagesOn The Determination of Stress Concentration in A Stretched Plate With Two HolesKris SmaczekNo ratings yet
- I Nternational Journal of Computational Engineering Research (Ijceronline - Com) Vol. 2 Issue. 7Document7 pagesI Nternational Journal of Computational Engineering Research (Ijceronline - Com) Vol. 2 Issue. 7International Journal of computational Engineering research (IJCER)No ratings yet
- ExponDocument9 pagesExponSimos SoldatosNo ratings yet
- K. F. Riley M. P. Hobson Student Solution Manual For Mathematical Methods For Physics and Engineering Third Edition 2006 Cambridge University PressDocument15 pagesK. F. Riley M. P. Hobson Student Solution Manual For Mathematical Methods For Physics and Engineering Third Edition 2006 Cambridge University PresskfiriewNo ratings yet
- 000250Document70 pages000250Katz EscañoNo ratings yet
- Calculus of Several Variables (Serge Lang)Document24 pagesCalculus of Several Variables (Serge Lang)Pablo andres7123No ratings yet
- Toeplitz Operators With Quasi-Separately Radial SymbolsDocument15 pagesToeplitz Operators With Quasi-Separately Radial SymbolsJulio Cesar Jaramillo SandovalNo ratings yet
- Solucionario MeasureDocument23 pagesSolucionario MeasureDanny100% (1)
- Acta Applicandae Mathematicae Volume 36 Issue 1-2 1994 (Doi 10.1007 - bf01001546) A. O. Smirnov - Finite-Gap Elliptic Solutions of The KDV EquationDocument42 pagesActa Applicandae Mathematicae Volume 36 Issue 1-2 1994 (Doi 10.1007 - bf01001546) A. O. Smirnov - Finite-Gap Elliptic Solutions of The KDV EquationArmando Treibich KohnNo ratings yet
- Products Formulas 18Document16 pagesProducts Formulas 18Huong Cam ThuyNo ratings yet
- Bivariate Lagrange InterpolationDocument11 pagesBivariate Lagrange InterpolationThiago NobreNo ratings yet
- Mark Rusi BolDocument55 pagesMark Rusi BolPat BustillosNo ratings yet
- Elliptic Functions and Elliptic Curves (A Classical Introduction)Document108 pagesElliptic Functions and Elliptic Curves (A Classical Introduction)Dao ThinhNo ratings yet
- Poisson FormulaDocument15 pagesPoisson FormulaRiki NurzamanNo ratings yet
- Example: (1, 2, 3, 4, 5, 6), U (A, B, C)Document64 pagesExample: (1, 2, 3, 4, 5, 6), U (A, B, C)Thuy Dung NguyenNo ratings yet
- (1972) A Method FOR IMPROVING THE ESTIMATION OF MEMBRANE FREQUENCIESDocument10 pages(1972) A Method FOR IMPROVING THE ESTIMATION OF MEMBRANE FREQUENCIESMohammad AshrafyNo ratings yet
- Solutions To The 67th William Lowell Putnam Mathematical Competition Saturday, December 2, 2006Document8 pagesSolutions To The 67th William Lowell Putnam Mathematical Competition Saturday, December 2, 2006Ganesh KumarNo ratings yet
- Reverse Triangle Inequalities For PotentialsDocument22 pagesReverse Triangle Inequalities For PotentialsLazar MihailNo ratings yet
- 39th International Mathematical OlympiadDocument5 pages39th International Mathematical OlympiadLê Việt HảiNo ratings yet
- A New Fourier TransformDocument22 pagesA New Fourier TransformPefwefwevgNo ratings yet
- 2002 - Paper IIDocument6 pages2002 - Paper IIhmphryNo ratings yet
- Heron Triangles: A Gergonne-Cevian-and-Median Perspective K. R. S. SastryDocument8 pagesHeron Triangles: A Gergonne-Cevian-and-Median Perspective K. R. S. SastryAltananyNo ratings yet
- Billares CuanticosDocument7 pagesBillares Cuanticoscaruiz69No ratings yet
- New Results in The Calculation of Modulation ProductsDocument16 pagesNew Results in The Calculation of Modulation ProductsRia AlexNo ratings yet
- On The Total Curvature of Immersed ManifoldsDocument14 pagesOn The Total Curvature of Immersed ManifoldsÍcaro GonçalvesNo ratings yet
- The Spectrum of Differential Operators and Square-Integrable SolutionsDocument15 pagesThe Spectrum of Differential Operators and Square-Integrable SolutionsReza FahlevieNo ratings yet
- Numerical Ranges of Unbounded OperatorsDocument22 pagesNumerical Ranges of Unbounded OperatorsAdedokun AbayomiNo ratings yet
- Solutions To The 61st William Lowell Putnam Mathematical Competition Saturday, December 2, 2000Document3 pagesSolutions To The 61st William Lowell Putnam Mathematical Competition Saturday, December 2, 2000Benny PrasetyaNo ratings yet
- Hayashi CH 1 AnswersDocument4 pagesHayashi CH 1 AnswersLauren spNo ratings yet
- Spacetime Singularity & Poincare's Balayage: Mathematical Renormalization of Newtonian Potentials Using Nonlinear Singular Elliptic and Parabolic Equations. Carlos C. ArandaDocument13 pagesSpacetime Singularity & Poincare's Balayage: Mathematical Renormalization of Newtonian Potentials Using Nonlinear Singular Elliptic and Parabolic Equations. Carlos C. ArandaCarlos Cesar ArandaNo ratings yet
- Anna's AssignmentDocument16 pagesAnna's Assignmenttumaini murrayNo ratings yet
- Remarks On Chapter 5 in L. Trefethen: Spectral Methods in MATLABDocument8 pagesRemarks On Chapter 5 in L. Trefethen: Spectral Methods in MATLABTri NguyenNo ratings yet
- NM Unit5Document6 pagesNM Unit5Rohit GadekarNo ratings yet
- Stable CurvesDocument8 pagesStable CurvesTabes BridgesNo ratings yet
- Mathematical Tools LEC NOTES PDFDocument41 pagesMathematical Tools LEC NOTES PDFtweeter_shadowNo ratings yet
- Math 784: Algebraic NUMBER THEORYDocument70 pagesMath 784: Algebraic NUMBER THEORYMohamed AtiaNo ratings yet
- Msci Examination: Phy-415 (Msci 4242) Relativistic Waves and Quantum FieldsDocument7 pagesMsci Examination: Phy-415 (Msci 4242) Relativistic Waves and Quantum FieldsRoy VeseyNo ratings yet
- Filaseta M. - Algebraic Number Theory (Math 784) (1996)Document70 pagesFilaseta M. - Algebraic Number Theory (Math 784) (1996)Melania BerindeaNo ratings yet
- Einstein's Equations and Clifford Algebra - Patrick R. GirardDocument6 pagesEinstein's Equations and Clifford Algebra - Patrick R. GirardAndres GranadosNo ratings yet
- Lnotes Mathematical Found QMDocument19 pagesLnotes Mathematical Found QMjuannaviapNo ratings yet
- Dyn Kin Pi LambdaDocument6 pagesDyn Kin Pi LambdaAlejandro RMNo ratings yet
- Baku 120417Document10 pagesBaku 120417FlorinNo ratings yet
- Galerkin-Wavelet Methods For Two-Point Boundary Value ProblemsDocument22 pagesGalerkin-Wavelet Methods For Two-Point Boundary Value ProblemsAlloula AlaeNo ratings yet
- Scattering Matrix in Conformal Geometry: The Erwin SCHR Odinger International Institute For Mathematical PhysicsDocument29 pagesScattering Matrix in Conformal Geometry: The Erwin SCHR Odinger International Institute For Mathematical PhysicsJose RamirezNo ratings yet
- Mathematical I PDFDocument124 pagesMathematical I PDFProfessor Dr. Nabeel Al-Bayati-Consultant EngineerNo ratings yet
- Boundary Value Problems For Nonlinear Second-Order Vector Differential EquationsDocument13 pagesBoundary Value Problems For Nonlinear Second-Order Vector Differential EquationsAdrian Calin MurzaNo ratings yet
- Some Remarks On Spherical HarmonicsDocument15 pagesSome Remarks On Spherical HarmonicsAlba García RuizNo ratings yet
- Putnam 2009 SolutionsDocument5 pagesPutnam 2009 SolutionsWilliam MaxwellNo ratings yet
- High Frequency Active Auroral Research ProgramDocument11 pagesHigh Frequency Active Auroral Research Programbiswajit_k25724No ratings yet
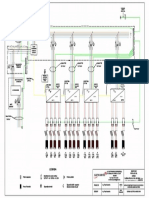
- SCHEMA MONOFILARA PIPEPLAST - CompletDocument1 pageSCHEMA MONOFILARA PIPEPLAST - Completmihai oproescu100% (1)
- Logitech Hidpp 2.0 Specification Draft 2012-06-04Document16 pagesLogitech Hidpp 2.0 Specification Draft 2012-06-04cpttrNo ratings yet
- Introduction AdvertisingDocument82 pagesIntroduction AdvertisingselbalNo ratings yet
- Ch06 Solations Brigham 10th EDocument32 pagesCh06 Solations Brigham 10th ERafay HussainNo ratings yet
- Hepatitis Doc LectureDocument12 pagesHepatitis Doc LectureDr. Muhammad RazzaqNo ratings yet
- Gutindex 2009Document170 pagesGutindex 2009Lankesh ZadeNo ratings yet
- Scott Meech Etec 500 Journal AssignmentDocument7 pagesScott Meech Etec 500 Journal Assignmentapi-373684092No ratings yet
- Thayer, Indo-Pacific Geopolitics and The South China Sea Disputes: Australian PerspectiveDocument21 pagesThayer, Indo-Pacific Geopolitics and The South China Sea Disputes: Australian PerspectiveCarlyle Alan ThayerNo ratings yet
- Lecture1 Introduction To BiostatisticsDocument18 pagesLecture1 Introduction To BiostatisticsIdiAmadouNo ratings yet
- One Thing Piano Chords - One DirectionDocument3 pagesOne Thing Piano Chords - One DirectionJose AntonioNo ratings yet
- ION Intelligent Metering Device and Revenue Meter: Applications SummaryDocument2 pagesION Intelligent Metering Device and Revenue Meter: Applications SummaryjocemirferstNo ratings yet
- Articles A-An-The 1Document1 pageArticles A-An-The 1api-249605888No ratings yet
- ISKCON GBC Role and ResponsibilityDocument11 pagesISKCON GBC Role and ResponsibilityDeenanathaNo ratings yet
- Pulse in The Stomach - Could It Be An Abdominal Aortic AneurysmDocument3 pagesPulse in The Stomach - Could It Be An Abdominal Aortic AneurysmLazar VučetićNo ratings yet
- Speedy ConstructionDocument57 pagesSpeedy Constructionritika bhatiaNo ratings yet
- Metrics Transformation in Telecommunications EF0117Document20 pagesMetrics Transformation in Telecommunications EF0117shru294No ratings yet
- A Review On The Law of Supply and Demand (Part 1)Document25 pagesA Review On The Law of Supply and Demand (Part 1)Janiña NatividadNo ratings yet
- Design and Fabrication of A Blanking Tool: Gopi Krishnan. C (30408114309) (30408114092)Document44 pagesDesign and Fabrication of A Blanking Tool: Gopi Krishnan. C (30408114309) (30408114092)Daniel Saldaña ANo ratings yet
- Bronchiectasis in nonCF in ChildrenDocument9 pagesBronchiectasis in nonCF in ChildrenathaNo ratings yet
- 01 PDFDocument2 pages01 PDFezrawidian99No ratings yet
- BT 1 M01 - Construction History of Building MaterialsDocument5 pagesBT 1 M01 - Construction History of Building MaterialsReyvel Sapaden CorcueraNo ratings yet
- 6.1 Differential Calculus 01 Solutions.pDocument1 page6.1 Differential Calculus 01 Solutions.pGerard VillonesNo ratings yet
- Certificate in Sports Facilities ManagementDocument7 pagesCertificate in Sports Facilities ManagementAnkush SinghNo ratings yet
- Certene™ Llgf-220A: Muehlstein - Linear Low Density PolyethyleneDocument1 pageCertene™ Llgf-220A: Muehlstein - Linear Low Density PolyethyleneRoberto De Mesa PNo ratings yet
- Heat LossDocument36 pagesHeat LossHgagselim SelimNo ratings yet
- Managing NetworksDocument1 pageManaging Networksdovipat712No ratings yet
- SynopsisDocument2 pagesSynopsisSanketDhandeNo ratings yet