Download as docx, pdf, or txt
You might also like
- Design and Construction of A Low DC Voltage Power Supply UnitDocument28 pagesDesign and Construction of A Low DC Voltage Power Supply UnitRasaq Eneji Jimoh100% (1)
- Light Seeking Robot ReportDocument40 pagesLight Seeking Robot ReportvishnuNo ratings yet
- Interface Lab ReportDocument8 pagesInterface Lab ReportSharfuddin ZishanNo ratings yet
- Project 15 MOTOR BASICSDocument7 pagesProject 15 MOTOR BASICSDarwin VargasNo ratings yet
- LabBJTandH Bridge UpdateDocument8 pagesLabBJTandH Bridge UpdateAndrew BuckleyNo ratings yet
- LabBJTandH BridgeDocument12 pagesLabBJTandH BridgeAndrew BuckleyNo ratings yet
- Digital Object Counter Using MicrocontrollerDocument60 pagesDigital Object Counter Using MicrocontrollerKishan Amara82% (22)
- Lab 3Document6 pagesLab 3Vu LeNo ratings yet
- Electric Motor: Project DescriptionDocument20 pagesElectric Motor: Project DescriptionAllen LeeNo ratings yet
- DL 30130 - Extract From The ManualDocument6 pagesDL 30130 - Extract From The ManuallpestanaNo ratings yet
- Lab 2 ControlDocument5 pagesLab 2 ControlOsama GamingNo ratings yet
- ELEC30x0 Lab8Document6 pagesELEC30x0 Lab8Lûtwàmä JôëNo ratings yet
- Arduino Lab 1 - Motor Control ENGN1211 2023Document5 pagesArduino Lab 1 - Motor Control ENGN1211 2023huh leNo ratings yet
- Green EnergyDocument13 pagesGreen EnergyAlin ÒóNo ratings yet
- Arduino DC Motor ControlDocument4 pagesArduino DC Motor ControlKathryn WorkmanNo ratings yet
- Experiment 1Document8 pagesExperiment 1Claire AragoncilloNo ratings yet
- Expt - No.2 (The Direct Current Motor, Part 2)Document6 pagesExpt - No.2 (The Direct Current Motor, Part 2)Danwilliam NabutilNo ratings yet
- DC Motor Control ExpDocument6 pagesDC Motor Control Expvijesh_anna100% (1)
- DC Motor Speed Control Using Pulse Width Modulation (PWM)Document30 pagesDC Motor Speed Control Using Pulse Width Modulation (PWM)अमरेश झाNo ratings yet
- Team 4 Technical ReportDocument12 pagesTeam 4 Technical Reportabdelrahmanmoataz0No ratings yet
- TIA Portal - Simens S7 1200 PLC GuideDocument63 pagesTIA Portal - Simens S7 1200 PLC GuideTahsin Zaman TalhaNo ratings yet
- Massachusetts Institute of Technology 2.12 Introduction To RoboticsDocument5 pagesMassachusetts Institute of Technology 2.12 Introduction To RoboticsHenry Lois Davila AndradeNo ratings yet
- Mini Project VikramDocument11 pagesMini Project VikramSachitananthan VasudevanNo ratings yet
- MSD Exp2Document5 pagesMSD Exp2ngolos247No ratings yet
- Tutorial L298N Driver MotorDocument5 pagesTutorial L298N Driver MotorHairul Anam SNo ratings yet
- Ele Lab ManualDocument34 pagesEle Lab ManualAwanish Pratap SinghNo ratings yet
- Avr Tutorial7 Motor ControlDocument5 pagesAvr Tutorial7 Motor ControlHari RamNo ratings yet
- Lab 2Document12 pagesLab 2Malik YousafNo ratings yet
- 2002apr08 Icd Amd Pow TacDocument9 pages2002apr08 Icd Amd Pow TacMihaela CaciumarciucNo ratings yet
- Tutorial 2 Drawing A 555 Timer CircuitDocument10 pagesTutorial 2 Drawing A 555 Timer CircuitFernando ValenteNo ratings yet
- Lab 2 - Flashlight Follower: ObjectiveDocument6 pagesLab 2 - Flashlight Follower: ObjectiveChristian OrtizNo ratings yet
- CISE 204 Digital System Design Lab Manual PDFDocument44 pagesCISE 204 Digital System Design Lab Manual PDFEng-Mohammed KayedNo ratings yet
- 3axis TB6560 Stepper Motor Driver Board Users Instruction: Key FeaturesDocument9 pages3axis TB6560 Stepper Motor Driver Board Users Instruction: Key FeaturesDaniela HungNo ratings yet
- Micro Controller Base Satelite TrackingDocument67 pagesMicro Controller Base Satelite TrackingYuvraj ChaudhariNo ratings yet
- Lesson 14: DC Motors DC Motors Lesson 14: The Big IdeaDocument12 pagesLesson 14: DC Motors DC Motors Lesson 14: The Big IdeaMr. KhanNo ratings yet
- CPE400 Lab8 ARCONADO DEVELLES 2 PDFDocument10 pagesCPE400 Lab8 ARCONADO DEVELLES 2 PDFKimNo ratings yet
- Lab 3: Building A Power Supply and A Stereo Amplifier: ObjectivesDocument5 pagesLab 3: Building A Power Supply and A Stereo Amplifier: ObjectivesKhalil2097No ratings yet
- A E Lab ManualDocument81 pagesA E Lab Manualumaranitg2188No ratings yet
- Proy. Electrónico DC Power MeterDocument20 pagesProy. Electrónico DC Power Metervpol25No ratings yet
- Latching Relay ModuleDocument8 pagesLatching Relay ModuleJunior ElimeelogodavejuniorNo ratings yet
- Arduino ppt-1Document25 pagesArduino ppt-1Aman NaikyaNo ratings yet
- Motor Driver Circuit For ArduinoDocument5 pagesMotor Driver Circuit For ArduinoEko Hadi SusantoNo ratings yet
- Date: Experiment - 2 To Study The Operation of Controlled Rectifier Fed Separately Excited DC Motor DriveDocument5 pagesDate: Experiment - 2 To Study The Operation of Controlled Rectifier Fed Separately Excited DC Motor DriveDaksh SharmaNo ratings yet
- Electrical Script 04-08-08Document6 pagesElectrical Script 04-08-08raj kiranNo ratings yet
- Driving LEDs With A PIC MCDocument11 pagesDriving LEDs With A PIC MCLavinia MăgeruşanNo ratings yet
- Table of Content S.No Page No.: I 1.1 Conventional Methods of Speed Control 4Document17 pagesTable of Content S.No Page No.: I 1.1 Conventional Methods of Speed Control 4Janani JanuNo ratings yet
- Line Follower Robot Using LabVIEWDocument6 pagesLine Follower Robot Using LabVIEWTrần Huy Vinh QuangNo ratings yet
- RC CarDocument16 pagesRC CarKanaka H KNo ratings yet
- Dual BLDC Motor Driver For Arm of Humanoid Robot MARKODocument5 pagesDual BLDC Motor Driver For Arm of Humanoid Robot MARKOsunwheelNo ratings yet
- Ic Lab ManaulDocument73 pagesIc Lab Manaulsreenath1729No ratings yet
- Experiment 12 The Universal Motor ObjectiveDocument5 pagesExperiment 12 The Universal Motor ObjectiveFahad IbrarNo ratings yet
- Lab 9Document5 pagesLab 9LA VĂN ANH CHINo ratings yet
- MegaMoto User ManualDocument13 pagesMegaMoto User ManualMadhu NuggehalliNo ratings yet
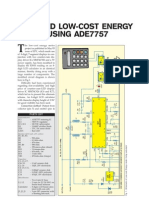
- Modified Low Cost Energy MeterDocument2 pagesModified Low Cost Energy MeterSrini VasNo ratings yet
- Lab2-Analog Inputs and DC Motor ControlDocument3 pagesLab2-Analog Inputs and DC Motor ControlBigMace23No ratings yet
- ELEC302 Lab10Document4 pagesELEC302 Lab10Ashik AhmedNo ratings yet
- CLASS 6-DC Motor ControlDocument44 pagesCLASS 6-DC Motor ControlInes99No ratings yet
- X3 Modelling Equations No AnsDocument12 pagesX3 Modelling Equations No AnsShabi HassanNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- 2nd Generation IP Video Intercom System 2019H2 PDFDocument16 pages2nd Generation IP Video Intercom System 2019H2 PDFotorenikNo ratings yet
- Physics Project On Full Wave Rectifier Class 12 CBSEDocument13 pagesPhysics Project On Full Wave Rectifier Class 12 CBSESomrat Dutta60% (15)
- Chapter 4 Sinusoidal Steadystate AnalysisDocument17 pagesChapter 4 Sinusoidal Steadystate AnalysisCraig PeriNo ratings yet
- Digital Signal Processing: Course Code: Credit Hours:3 Prerequisite:30107341Document48 pagesDigital Signal Processing: Course Code: Credit Hours:3 Prerequisite:30107341محمد القدوميNo ratings yet
- 2015 DVClub Austin - SVA Tutorial - and - SVA Planning PDFDocument39 pages2015 DVClub Austin - SVA Tutorial - and - SVA Planning PDFgideontargrave7No ratings yet
- Connectwell Terminal BlocksDocument30 pagesConnectwell Terminal BlockssourabhNo ratings yet
- Central Women's University: Assignment No: 1 Assignment On SwitchingDocument14 pagesCentral Women's University: Assignment No: 1 Assignment On SwitchingAfrina DiptiNo ratings yet
- Word Meaning Translation Word Meaning Translation: To Join Together Into One A Meeting For DiscussionDocument1 pageWord Meaning Translation Word Meaning Translation: To Join Together Into One A Meeting For DiscussionMohamed AlmandalawyNo ratings yet
- 3500-64M Dynamic Pressure Monitor Datasheet - 141536Document8 pages3500-64M Dynamic Pressure Monitor Datasheet - 141536Kourosh52No ratings yet
- Murphy Manual de IndicadorDocument12 pagesMurphy Manual de IndicadorCarlos PaezNo ratings yet
- 05 Wiring DiagramDocument7 pages05 Wiring DiagramYudhi SensasiNo ratings yet
- AssigmentDocument11 pagesAssigmentYonatan GizawNo ratings yet
- Optical Fiber Communication: An IntroductionDocument32 pagesOptical Fiber Communication: An IntroductionEr Tapish Kant KallaaNo ratings yet
- Manual Cisco Router 1600seriesDocument8 pagesManual Cisco Router 1600seriesRomanNo ratings yet
- Garmin GTX330 PDFDocument65 pagesGarmin GTX330 PDFJoe GatliffNo ratings yet
- Rfid BunDocument7 pagesRfid BunSimona NicoletaNo ratings yet
- Audio SystemDocument107 pagesAudio SystemPee OohNo ratings yet
- What Is A Hard Disk DriveDocument19 pagesWhat Is A Hard Disk DriveGladis PulanNo ratings yet
- MSIDocument3 pagesMSIMelina MoncayoNo ratings yet
- On-Board Electrical System Power Supply, FunctionDocument3 pagesOn-Board Electrical System Power Supply, FunctionrodeoaNo ratings yet
- MEMS Digital Microphone and Arduino Compatible Microcontroller: An Embedded System For Noise MonitoringDocument23 pagesMEMS Digital Microphone and Arduino Compatible Microcontroller: An Embedded System For Noise MonitoringShobanraj LetchumananNo ratings yet
- Theminin's TheoremDocument4 pagesTheminin's TheoremKaushal SahaNo ratings yet
- 265 Clamp-On Tester With Frequency and Capacitance: Test The TPI AdvantageDocument2 pages265 Clamp-On Tester With Frequency and Capacitance: Test The TPI AdvantageIBjsc VietnamNo ratings yet
- Flexret: A Flexible, Integrated Solution For Adjusting The Electrical Downtilt of Kathrein Flexret AntennasDocument11 pagesFlexret: A Flexible, Integrated Solution For Adjusting The Electrical Downtilt of Kathrein Flexret AntennasиванNo ratings yet
- Elektronapon Bhegelli Emergency Lighting Kat PDFDocument112 pagesElektronapon Bhegelli Emergency Lighting Kat PDFglisha84No ratings yet
- Lighting Control SystemDocument2 pagesLighting Control SystemRemya R. KumarNo ratings yet
- Comparison of Ic Logic FamiliesDocument1 pageComparison of Ic Logic FamiliesPiash DasNo ratings yet
- Development of High Sensitivity Amplifier For VLF Receiver Application PDFDocument4 pagesDevelopment of High Sensitivity Amplifier For VLF Receiver Application PDFkuscuzNo ratings yet
- V50 2 Npe 150 PDFDocument1 pageV50 2 Npe 150 PDFHarry RincónNo ratings yet
- EC8651 TLW Unit 3 2 MarksDocument2 pagesEC8651 TLW Unit 3 2 MarksDhanaraj P0% (1)