
Large Scale Systems With Multiple Object
Large Scale Systems With Multiple Object
You might also like
- Kant A Collection of Critical Essays (19 - (Ed.) Robert P. WolfDocument437 pagesKant A Collection of Critical Essays (19 - (Ed.) Robert P. Wolfcrepymicz55555100% (4)
- Wate R Res Ource Sy Stem M Odeling For Conflict R EsolutionDocument13 pagesWate R Res Ource Sy Stem M Odeling For Conflict R EsolutioncfdcfdcfdNo ratings yet
- An Attribute Driven Web Consensus Support System For Heterogeneous Group Decision MakingDocument11 pagesAn Attribute Driven Web Consensus Support System For Heterogeneous Group Decision MakingctwanNo ratings yet
- Problem Structuring Methods PSMDocument16 pagesProblem Structuring Methods PSMapi-6921763100% (3)
- Metaheuristics in Combinatorial Optimization OvervDocument42 pagesMetaheuristics in Combinatorial Optimization OvervAmanda StrawNo ratings yet
- Al Tu Zarra 2010Document19 pagesAl Tu Zarra 2010dhanesh15No ratings yet
- A Fast and Elitist Multiobjective Genetic AlgorithmNSGA-IIDocument16 pagesA Fast and Elitist Multiobjective Genetic AlgorithmNSGA-IIkarl liNo ratings yet
- Multiple Criteria Districting Problems: The Public Transportation Network Pricing System of The Paris RegionDocument24 pagesMultiple Criteria Districting Problems: The Public Transportation Network Pricing System of The Paris Regiondelia2011No ratings yet
- Decision MakingDocument6 pagesDecision Makingshahriar firouzabadiNo ratings yet
- Ecological Economics: Jorge E. Araña, Carmelo J. LeónDocument11 pagesEcological Economics: Jorge E. Araña, Carmelo J. LeónCesar VillantoyNo ratings yet
- Decision MakingDocument6 pagesDecision Makingshahriar firouzabadiNo ratings yet
- Pone 0201868 PDFDocument20 pagesPone 0201868 PDFjkl316No ratings yet
- Comparison Jmetal 1Document18 pagesComparison Jmetal 1Sofía소피아No ratings yet
- Using Analytic Hierarchy Process and Decision Tree For A Production Decision MakingDocument4 pagesUsing Analytic Hierarchy Process and Decision Tree For A Production Decision MakingBunga Jelia LarasatiNo ratings yet
- A Fast and Elitist Multiobjective Genetic Algorithm: Nsga-IiDocument16 pagesA Fast and Elitist Multiobjective Genetic Algorithm: Nsga-IiVBJBNNo ratings yet
- Review ProcessDocument31 pagesReview ProcessGuillermo Serralde PaezNo ratings yet
- Y Delayed Feedback Thesis ReferenceDocument7 pagesY Delayed Feedback Thesis ReferencesiddhantvibhuteNo ratings yet
- Solution Integration in Combinatorial Optimization With Applications To Cooperative Search and Rich Vehicle RoutingDocument23 pagesSolution Integration in Combinatorial Optimization With Applications To Cooperative Search and Rich Vehicle RoutingNizar El HachemiNo ratings yet
- Heuristic SDocument23 pagesHeuristic Szuera2No ratings yet
- Shah Oppenheimer 2008 - HeuristicsDocument16 pagesShah Oppenheimer 2008 - HeuristicsAngelo LeeNo ratings yet
- Accepted ManuscriptDocument27 pagesAccepted ManuscriptMohammadreza HadipourNo ratings yet
- Sensitivity AnalysesDocument19 pagesSensitivity Analysesgabriela ledesmaNo ratings yet
- A Model For Optimizing Multi-Product Inventory Systems With Multiple ConstraintsDocument13 pagesA Model For Optimizing Multi-Product Inventory Systems With Multiple ConstraintsDana Marsetiya UtamaNo ratings yet
- Modélisation en Aide À La DécisionDocument16 pagesModélisation en Aide À La DécisionLyna HamadouNo ratings yet
- Making Decision and Computer ScienceDocument10 pagesMaking Decision and Computer ScienceTrong-Minh HoangNo ratings yet
- The Voice of OptimizationDocument41 pagesThe Voice of OptimizationShadNo ratings yet
- 286-Article Text-311-1-10-20190107Document5 pages286-Article Text-311-1-10-20190107Mema EngNo ratings yet
- Teisman 2000Document20 pagesTeisman 2000iardenakuznetchNo ratings yet
- Algorithms 16 00406Document30 pagesAlgorithms 16 00406Surfer LeoNo ratings yet
- Reference Point Based Multi-Objective Optimization Using Evolutionary AlgorithmsDocument14 pagesReference Point Based Multi-Objective Optimization Using Evolutionary AlgorithmsNazifa NawerNo ratings yet
- Advances in Engineering Software: Shahrzad Saremi, Seyedali Mirjalili, Andrew LewisDocument18 pagesAdvances in Engineering Software: Shahrzad Saremi, Seyedali Mirjalili, Andrew LewisAmrit PaudelNo ratings yet
- Advances in Engineering Software: Shahrzad Saremi, Seyedali Mirjalili, Andrew LewisDocument18 pagesAdvances in Engineering Software: Shahrzad Saremi, Seyedali Mirjalili, Andrew LewisRPCG NBANo ratings yet
- Designing Algorithms and The Fairness Criteria They Should SatisfyDocument1 pageDesigning Algorithms and The Fairness Criteria They Should SatisfyEarthNandanNo ratings yet
- Information Sciences: E. Cables, M.T. Lamata, J.L. VerdegayDocument10 pagesInformation Sciences: E. Cables, M.T. Lamata, J.L. VerdegayMorteza YazdaniNo ratings yet
- Operational Research Society and Palgrave Macmillan Journals Are Collaborating With JSTOR To Digitize, Preserve and Extend The Journal of The Operational Research SocietyDocument18 pagesOperational Research Society and Palgrave Macmillan Journals Are Collaborating With JSTOR To Digitize, Preserve and Extend The Journal of The Operational Research SocietycamiloNo ratings yet
- Entropy-Based Weighting Applied To Normal Boundary Intersection Approach: The Vertical Turning of Martensitic Gray Cast Iron Piston Rings CaseDocument11 pagesEntropy-Based Weighting Applied To Normal Boundary Intersection Approach: The Vertical Turning of Martensitic Gray Cast Iron Piston Rings CasePedroAugustoNo ratings yet
- Higher-Order Decision Theory: Jules Hedges, Paulo Oliva Evguenia Sprits, Philipp Zahn Viktor WinschelDocument21 pagesHigher-Order Decision Theory: Jules Hedges, Paulo Oliva Evguenia Sprits, Philipp Zahn Viktor WinschelPiotr LongoNo ratings yet
- Matheuristics For The Capacitated P-Median Problem: International Transactions in Operational Research June 2014Document18 pagesMatheuristics For The Capacitated P-Median Problem: International Transactions in Operational Research June 2014Carlos Dela CruzNo ratings yet
- Multi-Objective Particle Swarm Optimization Based On Fuzzy OptimalityDocument14 pagesMulti-Objective Particle Swarm Optimization Based On Fuzzy OptimalityAli HussienNo ratings yet
- 10 1016@j Inffus 2013 04 006Document31 pages10 1016@j Inffus 2013 04 006Zakaria SutomoNo ratings yet
- Seccion 2.1 y 2.2 Unidad 5Document33 pagesSeccion 2.1 y 2.2 Unidad 5Pepe ChupinNo ratings yet
- 1 s2.0 S0895717710000695 MainDocument9 pages1 s2.0 S0895717710000695 Maineloim_smNo ratings yet
- A Review On Bilevel Optimization From Classical To Evolutionary Approaches and ApplicationsDocument20 pagesA Review On Bilevel Optimization From Classical To Evolutionary Approaches and Applicationsrzavala760No ratings yet
- 42 961 2 PBDocument9 pages42 961 2 PBsarip stNo ratings yet
- Evolutionary Many-Objective Optimization Based On Dynamical DecompositionDocument16 pagesEvolutionary Many-Objective Optimization Based On Dynamical DecompositionSHUMETNo ratings yet
- DuiltyDocument16 pagesDuiltynahid hasanNo ratings yet
- Composite Stock CuttingDocument18 pagesComposite Stock CuttingJefferson SantanaNo ratings yet
- Information Sciences: Xuan-Hua Xu, Zhi-Jiao Du, Xiao-Hong Chen, Chen-Guang CaiDocument18 pagesInformation Sciences: Xuan-Hua Xu, Zhi-Jiao Du, Xiao-Hong Chen, Chen-Guang CaiOgmio AsesoríasNo ratings yet
- Case - Based - Reasoning - An - Overview - 1 - PDFDocument16 pagesCase - Based - Reasoning - An - Overview - 1 - PDFJohn RawaiNo ratings yet
- RL and CP For CODocument11 pagesRL and CP For COj3qbzodj7No ratings yet
- A Decade of Application of The Choquet and Sugeno Integrals in Multi-Criteria Decision AidDocument40 pagesA Decade of Application of The Choquet and Sugeno Integrals in Multi-Criteria Decision Aidsilv_phNo ratings yet
- Sea Lion Optimization Algorithm For Solving The Maximum Flow ProblemDocument39 pagesSea Lion Optimization Algorithm For Solving The Maximum Flow ProblemaziNo ratings yet
- Rim 2016Document29 pagesRim 2016buihuyanh2018No ratings yet
- Decisoes MulticriteriosDocument25 pagesDecisoes MulticriteriosLucas Frota de AquinoNo ratings yet
- An Overview of Heuristic Solution Methods: Journal of The Operational Research Society May 2004Document50 pagesAn Overview of Heuristic Solution Methods: Journal of The Operational Research Society May 2004Yaswitha SadhuNo ratings yet
- Brans Dan Vincke 1985 PDFDocument11 pagesBrans Dan Vincke 1985 PDFYogi HermawanNo ratings yet
- Strategy Proofness and Unanimity in Many-To-One Matching MarketsDocument16 pagesStrategy Proofness and Unanimity in Many-To-One Matching MarketsOussama El HamriNo ratings yet
- Single-Peaked Opinion UpdatesDocument7 pagesSingle-Peaked Opinion Updatess.dedaloscribdNo ratings yet
- Nit WarangalDocument39 pagesNit WarangalKoti ReddyNo ratings yet
- Kousuke Kikuchi's CVDocument2 pagesKousuke Kikuchi's CVKousuke KikuchiNo ratings yet
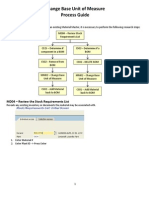
- MM - Change Base Unit of MeasureDocument9 pagesMM - Change Base Unit of MeasureDiwakar_ch_2002No ratings yet
- 2018 19MDModelAssessmentGuidelinesDocument44 pages2018 19MDModelAssessmentGuidelinesEd Praetorian100% (1)
- Presentation (Four Pillars)Document13 pagesPresentation (Four Pillars)Nor HazimahNo ratings yet
- Tony Robbins AssessmentsDocument1 pageTony Robbins AssessmentsjhoellibeeNo ratings yet
- Laboratory Experiment No. 5 Theodolite 1. Objective: 2. Intended Learning Outcomes (Ilos)Document5 pagesLaboratory Experiment No. 5 Theodolite 1. Objective: 2. Intended Learning Outcomes (Ilos)mae-maeNo ratings yet
- Assignment - Critical ReviewDocument12 pagesAssignment - Critical Reviewduan4evaNo ratings yet
- ATC Training Handbook (1.5!21!11-2022)Document43 pagesATC Training Handbook (1.5!21!11-2022)Samuel JoshuaNo ratings yet
- 4 Gabriele Guscyte & Jolanta Sinkuniene Full TextDocument25 pages4 Gabriele Guscyte & Jolanta Sinkuniene Full TextExamlNo ratings yet
- Development and Validation of A Low Dose Simulation Algorithm For Computed TomographyDocument9 pagesDevelopment and Validation of A Low Dose Simulation Algorithm For Computed TomographyBrankica MitrovicNo ratings yet
- Qualities of FacilitatorDocument7 pagesQualities of FacilitatorThompho HakhakhiNo ratings yet
- Srivastava en Al 2007 (Rural Poverty in MP)Document8 pagesSrivastava en Al 2007 (Rural Poverty in MP)rozgarNo ratings yet
- Brewer ThesisDocument66 pagesBrewer ThesistugaddanNo ratings yet
- Solution Manual For Art of Public Speaking 12th Edition Lucas 0073523917 9780073523910Document22 pagesSolution Manual For Art of Public Speaking 12th Edition Lucas 0073523917 9780073523910willieNo ratings yet
- Abdallah Fikry Abdel Rahman Soliman: EducationDocument2 pagesAbdallah Fikry Abdel Rahman Soliman: EducationMohamed TalebNo ratings yet
- Powers Are Used in Digital DataDocument16 pagesPowers Are Used in Digital DataAlejandro AguilarNo ratings yet
- Retirement and Pension System in Bangladesh 14-28Document16 pagesRetirement and Pension System in Bangladesh 14-28Arif AhmedNo ratings yet
- Practical Cost Saving Ideas For Design ProfessionalsDocument3 pagesPractical Cost Saving Ideas For Design ProfessionalsAnonymous JoB5ZxgNo ratings yet
- B Tech-2010Document152 pagesB Tech-2010Gina RobinsonNo ratings yet
- Belmont Citizens ForumDocument16 pagesBelmont Citizens ForumJoseph DoeNo ratings yet
- SF-2200H Operating ManualDocument36 pagesSF-2200H Operating ManualuripssNo ratings yet
- Mca 1 Sem Principles of Management and Communication Kca103 2022Document1 pageMca 1 Sem Principles of Management and Communication Kca103 2022kimog66911No ratings yet
- Tyler Leith Resume 1Document2 pagesTyler Leith Resume 1api-249456420No ratings yet
- Jason L. Dela Luna: Five9 Virtual Contact CenterDocument7 pagesJason L. Dela Luna: Five9 Virtual Contact CenterdendenbotNo ratings yet
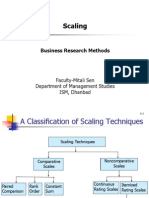
- Scaling: Business Research MethodsDocument23 pagesScaling: Business Research MethodsSatyajit GhoshNo ratings yet
- Analysis of An Underground Structure Settlement Risk Due To Tunneling-A Case Study From Tabriz, IranDocument7 pagesAnalysis of An Underground Structure Settlement Risk Due To Tunneling-A Case Study From Tabriz, IranPramod SinghNo ratings yet
- The Four Parenting StylesDocument9 pagesThe Four Parenting StylesGeorgiana PaunNo ratings yet
- Chapter 1 of Baby ThesisDocument7 pagesChapter 1 of Baby ThesisClint Dexter Solomon50% (2)






















































































Download as pdf or txt
You might also like
- Kant A Collection of Critical Essays (19 - (Ed.) Robert P. WolfDocument437 pagesKant A Collection of Critical Essays (19 - (Ed.) Robert P. Wolfcrepymicz55555100% (4)
- Wate R Res Ource Sy Stem M Odeling For Conflict R EsolutionDocument13 pagesWate R Res Ource Sy Stem M Odeling For Conflict R EsolutioncfdcfdcfdNo ratings yet
- An Attribute Driven Web Consensus Support System For Heterogeneous Group Decision MakingDocument11 pagesAn Attribute Driven Web Consensus Support System For Heterogeneous Group Decision MakingctwanNo ratings yet
- Problem Structuring Methods PSMDocument16 pagesProblem Structuring Methods PSMapi-6921763100% (3)
- Metaheuristics in Combinatorial Optimization OvervDocument42 pagesMetaheuristics in Combinatorial Optimization OvervAmanda StrawNo ratings yet
- Al Tu Zarra 2010Document19 pagesAl Tu Zarra 2010dhanesh15No ratings yet
- A Fast and Elitist Multiobjective Genetic AlgorithmNSGA-IIDocument16 pagesA Fast and Elitist Multiobjective Genetic AlgorithmNSGA-IIkarl liNo ratings yet
- Multiple Criteria Districting Problems: The Public Transportation Network Pricing System of The Paris RegionDocument24 pagesMultiple Criteria Districting Problems: The Public Transportation Network Pricing System of The Paris Regiondelia2011No ratings yet
- Decision MakingDocument6 pagesDecision Makingshahriar firouzabadiNo ratings yet
- Ecological Economics: Jorge E. Araña, Carmelo J. LeónDocument11 pagesEcological Economics: Jorge E. Araña, Carmelo J. LeónCesar VillantoyNo ratings yet
- Decision MakingDocument6 pagesDecision Makingshahriar firouzabadiNo ratings yet
- Pone 0201868 PDFDocument20 pagesPone 0201868 PDFjkl316No ratings yet
- Comparison Jmetal 1Document18 pagesComparison Jmetal 1Sofía소피아No ratings yet
- Using Analytic Hierarchy Process and Decision Tree For A Production Decision MakingDocument4 pagesUsing Analytic Hierarchy Process and Decision Tree For A Production Decision MakingBunga Jelia LarasatiNo ratings yet
- A Fast and Elitist Multiobjective Genetic Algorithm: Nsga-IiDocument16 pagesA Fast and Elitist Multiobjective Genetic Algorithm: Nsga-IiVBJBNNo ratings yet
- Review ProcessDocument31 pagesReview ProcessGuillermo Serralde PaezNo ratings yet
- Y Delayed Feedback Thesis ReferenceDocument7 pagesY Delayed Feedback Thesis ReferencesiddhantvibhuteNo ratings yet
- Solution Integration in Combinatorial Optimization With Applications To Cooperative Search and Rich Vehicle RoutingDocument23 pagesSolution Integration in Combinatorial Optimization With Applications To Cooperative Search and Rich Vehicle RoutingNizar El HachemiNo ratings yet
- Heuristic SDocument23 pagesHeuristic Szuera2No ratings yet
- Shah Oppenheimer 2008 - HeuristicsDocument16 pagesShah Oppenheimer 2008 - HeuristicsAngelo LeeNo ratings yet
- Accepted ManuscriptDocument27 pagesAccepted ManuscriptMohammadreza HadipourNo ratings yet
- Sensitivity AnalysesDocument19 pagesSensitivity Analysesgabriela ledesmaNo ratings yet
- A Model For Optimizing Multi-Product Inventory Systems With Multiple ConstraintsDocument13 pagesA Model For Optimizing Multi-Product Inventory Systems With Multiple ConstraintsDana Marsetiya UtamaNo ratings yet
- Modélisation en Aide À La DécisionDocument16 pagesModélisation en Aide À La DécisionLyna HamadouNo ratings yet
- Making Decision and Computer ScienceDocument10 pagesMaking Decision and Computer ScienceTrong-Minh HoangNo ratings yet
- The Voice of OptimizationDocument41 pagesThe Voice of OptimizationShadNo ratings yet
- 286-Article Text-311-1-10-20190107Document5 pages286-Article Text-311-1-10-20190107Mema EngNo ratings yet
- Teisman 2000Document20 pagesTeisman 2000iardenakuznetchNo ratings yet
- Algorithms 16 00406Document30 pagesAlgorithms 16 00406Surfer LeoNo ratings yet
- Reference Point Based Multi-Objective Optimization Using Evolutionary AlgorithmsDocument14 pagesReference Point Based Multi-Objective Optimization Using Evolutionary AlgorithmsNazifa NawerNo ratings yet
- Advances in Engineering Software: Shahrzad Saremi, Seyedali Mirjalili, Andrew LewisDocument18 pagesAdvances in Engineering Software: Shahrzad Saremi, Seyedali Mirjalili, Andrew LewisAmrit PaudelNo ratings yet
- Advances in Engineering Software: Shahrzad Saremi, Seyedali Mirjalili, Andrew LewisDocument18 pagesAdvances in Engineering Software: Shahrzad Saremi, Seyedali Mirjalili, Andrew LewisRPCG NBANo ratings yet
- Designing Algorithms and The Fairness Criteria They Should SatisfyDocument1 pageDesigning Algorithms and The Fairness Criteria They Should SatisfyEarthNandanNo ratings yet
- Information Sciences: E. Cables, M.T. Lamata, J.L. VerdegayDocument10 pagesInformation Sciences: E. Cables, M.T. Lamata, J.L. VerdegayMorteza YazdaniNo ratings yet
- Operational Research Society and Palgrave Macmillan Journals Are Collaborating With JSTOR To Digitize, Preserve and Extend The Journal of The Operational Research SocietyDocument18 pagesOperational Research Society and Palgrave Macmillan Journals Are Collaborating With JSTOR To Digitize, Preserve and Extend The Journal of The Operational Research SocietycamiloNo ratings yet
- Entropy-Based Weighting Applied To Normal Boundary Intersection Approach: The Vertical Turning of Martensitic Gray Cast Iron Piston Rings CaseDocument11 pagesEntropy-Based Weighting Applied To Normal Boundary Intersection Approach: The Vertical Turning of Martensitic Gray Cast Iron Piston Rings CasePedroAugustoNo ratings yet
- Higher-Order Decision Theory: Jules Hedges, Paulo Oliva Evguenia Sprits, Philipp Zahn Viktor WinschelDocument21 pagesHigher-Order Decision Theory: Jules Hedges, Paulo Oliva Evguenia Sprits, Philipp Zahn Viktor WinschelPiotr LongoNo ratings yet
- Matheuristics For The Capacitated P-Median Problem: International Transactions in Operational Research June 2014Document18 pagesMatheuristics For The Capacitated P-Median Problem: International Transactions in Operational Research June 2014Carlos Dela CruzNo ratings yet
- Multi-Objective Particle Swarm Optimization Based On Fuzzy OptimalityDocument14 pagesMulti-Objective Particle Swarm Optimization Based On Fuzzy OptimalityAli HussienNo ratings yet
- 10 1016@j Inffus 2013 04 006Document31 pages10 1016@j Inffus 2013 04 006Zakaria SutomoNo ratings yet
- Seccion 2.1 y 2.2 Unidad 5Document33 pagesSeccion 2.1 y 2.2 Unidad 5Pepe ChupinNo ratings yet
- 1 s2.0 S0895717710000695 MainDocument9 pages1 s2.0 S0895717710000695 Maineloim_smNo ratings yet
- A Review On Bilevel Optimization From Classical To Evolutionary Approaches and ApplicationsDocument20 pagesA Review On Bilevel Optimization From Classical To Evolutionary Approaches and Applicationsrzavala760No ratings yet
- 42 961 2 PBDocument9 pages42 961 2 PBsarip stNo ratings yet
- Evolutionary Many-Objective Optimization Based On Dynamical DecompositionDocument16 pagesEvolutionary Many-Objective Optimization Based On Dynamical DecompositionSHUMETNo ratings yet
- DuiltyDocument16 pagesDuiltynahid hasanNo ratings yet
- Composite Stock CuttingDocument18 pagesComposite Stock CuttingJefferson SantanaNo ratings yet
- Information Sciences: Xuan-Hua Xu, Zhi-Jiao Du, Xiao-Hong Chen, Chen-Guang CaiDocument18 pagesInformation Sciences: Xuan-Hua Xu, Zhi-Jiao Du, Xiao-Hong Chen, Chen-Guang CaiOgmio AsesoríasNo ratings yet
- Case - Based - Reasoning - An - Overview - 1 - PDFDocument16 pagesCase - Based - Reasoning - An - Overview - 1 - PDFJohn RawaiNo ratings yet
- RL and CP For CODocument11 pagesRL and CP For COj3qbzodj7No ratings yet
- A Decade of Application of The Choquet and Sugeno Integrals in Multi-Criteria Decision AidDocument40 pagesA Decade of Application of The Choquet and Sugeno Integrals in Multi-Criteria Decision Aidsilv_phNo ratings yet
- Sea Lion Optimization Algorithm For Solving The Maximum Flow ProblemDocument39 pagesSea Lion Optimization Algorithm For Solving The Maximum Flow ProblemaziNo ratings yet
- Rim 2016Document29 pagesRim 2016buihuyanh2018No ratings yet
- Decisoes MulticriteriosDocument25 pagesDecisoes MulticriteriosLucas Frota de AquinoNo ratings yet
- An Overview of Heuristic Solution Methods: Journal of The Operational Research Society May 2004Document50 pagesAn Overview of Heuristic Solution Methods: Journal of The Operational Research Society May 2004Yaswitha SadhuNo ratings yet
- Brans Dan Vincke 1985 PDFDocument11 pagesBrans Dan Vincke 1985 PDFYogi HermawanNo ratings yet
- Strategy Proofness and Unanimity in Many-To-One Matching MarketsDocument16 pagesStrategy Proofness and Unanimity in Many-To-One Matching MarketsOussama El HamriNo ratings yet
- Single-Peaked Opinion UpdatesDocument7 pagesSingle-Peaked Opinion Updatess.dedaloscribdNo ratings yet
- Nit WarangalDocument39 pagesNit WarangalKoti ReddyNo ratings yet
- Kousuke Kikuchi's CVDocument2 pagesKousuke Kikuchi's CVKousuke KikuchiNo ratings yet
- MM - Change Base Unit of MeasureDocument9 pagesMM - Change Base Unit of MeasureDiwakar_ch_2002No ratings yet
- 2018 19MDModelAssessmentGuidelinesDocument44 pages2018 19MDModelAssessmentGuidelinesEd Praetorian100% (1)
- Presentation (Four Pillars)Document13 pagesPresentation (Four Pillars)Nor HazimahNo ratings yet
- Tony Robbins AssessmentsDocument1 pageTony Robbins AssessmentsjhoellibeeNo ratings yet
- Laboratory Experiment No. 5 Theodolite 1. Objective: 2. Intended Learning Outcomes (Ilos)Document5 pagesLaboratory Experiment No. 5 Theodolite 1. Objective: 2. Intended Learning Outcomes (Ilos)mae-maeNo ratings yet
- Assignment - Critical ReviewDocument12 pagesAssignment - Critical Reviewduan4evaNo ratings yet
- ATC Training Handbook (1.5!21!11-2022)Document43 pagesATC Training Handbook (1.5!21!11-2022)Samuel JoshuaNo ratings yet
- 4 Gabriele Guscyte & Jolanta Sinkuniene Full TextDocument25 pages4 Gabriele Guscyte & Jolanta Sinkuniene Full TextExamlNo ratings yet
- Development and Validation of A Low Dose Simulation Algorithm For Computed TomographyDocument9 pagesDevelopment and Validation of A Low Dose Simulation Algorithm For Computed TomographyBrankica MitrovicNo ratings yet
- Qualities of FacilitatorDocument7 pagesQualities of FacilitatorThompho HakhakhiNo ratings yet
- Srivastava en Al 2007 (Rural Poverty in MP)Document8 pagesSrivastava en Al 2007 (Rural Poverty in MP)rozgarNo ratings yet
- Brewer ThesisDocument66 pagesBrewer ThesistugaddanNo ratings yet
- Solution Manual For Art of Public Speaking 12th Edition Lucas 0073523917 9780073523910Document22 pagesSolution Manual For Art of Public Speaking 12th Edition Lucas 0073523917 9780073523910willieNo ratings yet
- Abdallah Fikry Abdel Rahman Soliman: EducationDocument2 pagesAbdallah Fikry Abdel Rahman Soliman: EducationMohamed TalebNo ratings yet
- Powers Are Used in Digital DataDocument16 pagesPowers Are Used in Digital DataAlejandro AguilarNo ratings yet
- Retirement and Pension System in Bangladesh 14-28Document16 pagesRetirement and Pension System in Bangladesh 14-28Arif AhmedNo ratings yet
- Practical Cost Saving Ideas For Design ProfessionalsDocument3 pagesPractical Cost Saving Ideas For Design ProfessionalsAnonymous JoB5ZxgNo ratings yet
- B Tech-2010Document152 pagesB Tech-2010Gina RobinsonNo ratings yet
- Belmont Citizens ForumDocument16 pagesBelmont Citizens ForumJoseph DoeNo ratings yet
- SF-2200H Operating ManualDocument36 pagesSF-2200H Operating ManualuripssNo ratings yet
- Mca 1 Sem Principles of Management and Communication Kca103 2022Document1 pageMca 1 Sem Principles of Management and Communication Kca103 2022kimog66911No ratings yet
- Tyler Leith Resume 1Document2 pagesTyler Leith Resume 1api-249456420No ratings yet
- Jason L. Dela Luna: Five9 Virtual Contact CenterDocument7 pagesJason L. Dela Luna: Five9 Virtual Contact CenterdendenbotNo ratings yet
- Scaling: Business Research MethodsDocument23 pagesScaling: Business Research MethodsSatyajit GhoshNo ratings yet
- Analysis of An Underground Structure Settlement Risk Due To Tunneling-A Case Study From Tabriz, IranDocument7 pagesAnalysis of An Underground Structure Settlement Risk Due To Tunneling-A Case Study From Tabriz, IranPramod SinghNo ratings yet
- The Four Parenting StylesDocument9 pagesThe Four Parenting StylesGeorgiana PaunNo ratings yet
- Chapter 1 of Baby ThesisDocument7 pagesChapter 1 of Baby ThesisClint Dexter Solomon50% (2)