Download as pdf or txt
You might also like
- ECON7310: Elements of Econometrics: Research Project 2Document29 pagesECON7310: Elements of Econometrics: Research Project 2Saad MasoodNo ratings yet
- Poisson Part 2Document28 pagesPoisson Part 2DANISH ELCHINo ratings yet
- yit = β0 + β1xit,1 + β2xit,2 + β3xit,3 + β4xit,4 + uit ,x ,x ,x ,β ,β ,β ,βDocument10 pagesyit = β0 + β1xit,1 + β2xit,2 + β3xit,3 + β4xit,4 + uit ,x ,x ,x ,β ,β ,β ,βSaad MasoodNo ratings yet
- Normal Linear Regression Model Via Gibbs Sampling Gibbs Sampler DiagnosticsDocument11 pagesNormal Linear Regression Model Via Gibbs Sampling Gibbs Sampler DiagnosticsRenato Salazar RiosNo ratings yet
- Rules of Derivative Used in Economics (ECO401)Document8 pagesRules of Derivative Used in Economics (ECO401)Atif MahiNo ratings yet
- Simple Linear RegressionDocument2 pagesSimple Linear RegressionVaibhav RaulkarNo ratings yet
- Assignment 5 Mathematical FinanceDocument3 pagesAssignment 5 Mathematical FinanceYuengNo ratings yet
- Tutorial ProblemsDocument74 pagesTutorial ProblemsBhaswar MajumderNo ratings yet
- IGNOU - Lecture Notes - Linear AlgebraDocument29 pagesIGNOU - Lecture Notes - Linear Algebraruchi21julyNo ratings yet
- 07 - Lent - Topic 2 - Generalized Method of Moments, Part II - The Linear Model - mw217Document16 pages07 - Lent - Topic 2 - Generalized Method of Moments, Part II - The Linear Model - mw217Daniel Bogiatzis GibbonsNo ratings yet
- Numerical Approximation of Poisson Equation Using The Finite Difference MethodDocument8 pagesNumerical Approximation of Poisson Equation Using The Finite Difference MethodIJRASETPublicationsNo ratings yet
- 2.2. Univariate Time Series Analysis PDFDocument86 pages2.2. Univariate Time Series Analysis PDFane9sdNo ratings yet
- Romer 5e Solutions Manual 09Document23 pagesRomer 5e Solutions Manual 09MatthewNo ratings yet
- ARCH ModelDocument26 pagesARCH ModelAnish S.MenonNo ratings yet
- Romer 5e Solutions Manual 05Document23 pagesRomer 5e Solutions Manual 05Matthew100% (1)
- Chapter Two: by Solomon BatiDocument59 pagesChapter Two: by Solomon BatiUsmaan GammachuuNo ratings yet
- MA202 Probability Distributions, Transforms and Numerical MethodsDocument3 pagesMA202 Probability Distributions, Transforms and Numerical MethodsSáçhìñDêvNo ratings yet
- Mathematical InductionDocument6 pagesMathematical InductionSteve SchouppNo ratings yet
- Lehmann Scheffe PDFDocument7 pagesLehmann Scheffe PDFBarnita SharmaNo ratings yet
- 4 - LM Test and HeteroskedasticityDocument13 pages4 - LM Test and HeteroskedasticityArsalan KhanNo ratings yet
- Formula SheetDocument2 pagesFormula SheetJane Chun100% (1)
- Lecture Series 1 Linear Random and Fixed Effect Models and Their (Less) Recent ExtensionsDocument62 pagesLecture Series 1 Linear Random and Fixed Effect Models and Their (Less) Recent ExtensionsDaniel Bogiatzis GibbonsNo ratings yet
- Wooldridge Session 4Document64 pagesWooldridge Session 4Henry KaweesaNo ratings yet
- Improper IntegralDocument23 pagesImproper IntegralPblock Saher100% (1)
- Properties of The Trinomial DistributionDocument2 pagesProperties of The Trinomial DistributionPerry01No ratings yet
- 100 Problems in Stochastic ProcessesDocument74 pages100 Problems in Stochastic Processesscrat4acornNo ratings yet
- Chapter 9Document15 pagesChapter 9Fanny Sylvia C.No ratings yet
- 04 Jackknife PDFDocument22 pages04 Jackknife PDFuniversedrillNo ratings yet
- Conformal MappingDocument6 pagesConformal Mappingwaku74No ratings yet
- SMA 2231 Probability and Statistics IIIDocument89 pagesSMA 2231 Probability and Statistics III001亗PRÍËšT亗No ratings yet
- Problems of Vector SpacesDocument3 pagesProblems of Vector SpacesRaulNo ratings yet
- 04 - Frobenius 04 02 2015 Hermite - PP PDFDocument25 pages04 - Frobenius 04 02 2015 Hermite - PP PDFDewangSukhadareNo ratings yet
- Formulas Statistics II: ∫ = E (X) = ∫ = E (X) = ∫ ∫ Γ (p + 1) =Document1 pageFormulas Statistics II: ∫ = E (X) = ∫ = E (X) = ∫ ∫ Γ (p + 1) =pablo.sazhuangNo ratings yet
- MartingalesDocument40 pagesMartingalesSidakpal Singh SachdevaNo ratings yet
- CH-1 Differential Calculus of Functions of Several VariablesDocument21 pagesCH-1 Differential Calculus of Functions of Several VariablesEsubalew TeleleNo ratings yet
- Vector Autoregressions: How To Choose The Order of A VARDocument8 pagesVector Autoregressions: How To Choose The Order of A VARv4nhuy3nNo ratings yet
- HCMUT Final 2009Document9 pagesHCMUT Final 2009Aep CisNo ratings yet
- Macroeconomics 1 Problem Set 8 Solution PDFDocument5 pagesMacroeconomics 1 Problem Set 8 Solution PDFTaib MuffakNo ratings yet
- W3 ProbabilityDocument55 pagesW3 ProbabilityDanny MannoNo ratings yet
- Binomial DistributionDocument35 pagesBinomial DistributionBaber H. ElahiNo ratings yet
- Two-Way Classification (With One Observation Per Cell) :: y I P QDocument7 pagesTwo-Way Classification (With One Observation Per Cell) :: y I P QKhos Mahmuda AkterNo ratings yet
- Unit VI Stochastic Processes: Dr. Nita V. Patil Date:27/July/2021Document50 pagesUnit VI Stochastic Processes: Dr. Nita V. Patil Date:27/July/2021abcdNo ratings yet
- Mathematical Induction (Discrete Math)Document41 pagesMathematical Induction (Discrete Math)api-33642484No ratings yet
- III. 2. Unit Root TestsDocument41 pagesIII. 2. Unit Root TestsAbigail Molnár100% (1)
- Double SeriesDocument7 pagesDouble Seriesyacp16761No ratings yet
- Worksheet 4.1: Linear Inequalities in Two UnknownsDocument28 pagesWorksheet 4.1: Linear Inequalities in Two UnknownsAshley LamNo ratings yet
- Abstract, LinearDocument100 pagesAbstract, LinearMonty SigmundNo ratings yet
- HL1Document74 pagesHL1Ahmad100% (1)
- Unit 3 2DRVDocument82 pagesUnit 3 2DRVshubham raj laxmiNo ratings yet
- CH 10 TBDocument23 pagesCH 10 TBpaulofz100% (1)
- Multivariate DistributionsDocument8 pagesMultivariate DistributionsArima AckermanNo ratings yet
- Up Tps6 Lecture Powerpoint 11.1 2Document63 pagesUp Tps6 Lecture Powerpoint 11.1 2Kourtney CoppingerNo ratings yet
- E7 Ordinary Differential Equation New - 0Document28 pagesE7 Ordinary Differential Equation New - 0Mor DepRzNo ratings yet
- Module 4Document15 pagesModule 4Kim Daniel EstoyNo ratings yet
- Probability Theory Problems PDFDocument11 pagesProbability Theory Problems PDFPaun MihaiNo ratings yet
- Polynomial WorksheetDocument2 pagesPolynomial WorksheetgrvchikNo ratings yet
- CALCULUS 2 LM Chapter 1Document12 pagesCALCULUS 2 LM Chapter 1Ella FelicianoNo ratings yet
- Assignment 1Document1 pageAssignment 1kush ganatraNo ratings yet
- Three Ways To Define The Poisson ProcessDocument23 pagesThree Ways To Define The Poisson ProcessMansi PanwarNo ratings yet
- Neural Coding: Maneesh Sahani Gatsby Computational Neuroscience UnitDocument23 pagesNeural Coding: Maneesh Sahani Gatsby Computational Neuroscience UnitThien LeNo ratings yet
- BreathPP PsychReview Submit v8 PostprintDocument52 pagesBreathPP PsychReview Submit v8 PostprintNURUL ANIS AYUNI BINTI KHAIRUL ANUARNo ratings yet
- Freeman 2019 Environ. Res. Commun. 1 111007Document11 pagesFreeman 2019 Environ. Res. Commun. 1 111007NURUL ANIS AYUNI BINTI KHAIRUL ANUARNo ratings yet
- Kwu 248Document9 pagesKwu 248NURUL ANIS AYUNI BINTI KHAIRUL ANUARNo ratings yet
- Wa0017.Document13 pagesWa0017.NURUL ANIS AYUNI BINTI KHAIRUL ANUARNo ratings yet
- Wa0014.Document16 pagesWa0014.NURUL ANIS AYUNI BINTI KHAIRUL ANUARNo ratings yet
- Wa0001.Document3 pagesWa0001.NURUL ANIS AYUNI BINTI KHAIRUL ANUARNo ratings yet
- A Practical Grammar of The Sanskrit LanguageDocument408 pagesA Practical Grammar of The Sanskrit LanguageungulataNo ratings yet
- Bahir Dar University College of Medicine and Health SciencesDocument21 pagesBahir Dar University College of Medicine and Health SciencesMegbaruNo ratings yet
- Eb 12Document25 pagesEb 12SrewaBenshebilNo ratings yet
- Mini Capstone Final Project Implementation and AssessmentDocument8 pagesMini Capstone Final Project Implementation and AssessmentSodium ChlorideNo ratings yet
- Solute Solvent Interaction Studies of Amino Acids in Aqueous Tertiary-Butyl Alcohol SolutionsDocument6 pagesSolute Solvent Interaction Studies of Amino Acids in Aqueous Tertiary-Butyl Alcohol SolutionsNag28rajNo ratings yet
- Ca-Cw106451-Mat-098 - Manga Termocontraible WoerDocument5 pagesCa-Cw106451-Mat-098 - Manga Termocontraible WoerJhoel Ipanaque AlarconNo ratings yet
- ECE4740: Digital VLSI Design: Semiconductor MemoriesDocument35 pagesECE4740: Digital VLSI Design: Semiconductor Memoriessenthil kumar ganesanNo ratings yet
- Mafia Ii 360 Download Manual EngDocument21 pagesMafia Ii 360 Download Manual EngJuan Camilo Payan GuerreroNo ratings yet
- Foreign Body Airway ObstructionDocument16 pagesForeign Body Airway ObstructionKatNo ratings yet
- Glory To God Light From Light With LyricsDocument13 pagesGlory To God Light From Light With LyricsRodolfo DeriquitoNo ratings yet
- Coast Artillery Journal - Oct 1946Document84 pagesCoast Artillery Journal - Oct 1946CAP History LibraryNo ratings yet
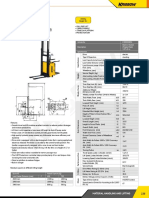
- Electric Stacker: Article No. KW0500894 Description Electric Stacker (Triplex Mast) 1.5T x3 M SpecificationDocument1 pageElectric Stacker: Article No. KW0500894 Description Electric Stacker (Triplex Mast) 1.5T x3 M SpecificationAsty RikyNo ratings yet
- RHA Market Study 2020Document6 pagesRHA Market Study 2020N SayNo ratings yet
- 3 PBDocument11 pages3 PBSuci DwiNo ratings yet
- Russound RS232 Hex Codes v1 - 00 - 7Document19 pagesRussound RS232 Hex Codes v1 - 00 - 7ceinstallerNo ratings yet
- Using Pointers For Indirect Addressing of The S7-200 Memory AreasDocument3 pagesUsing Pointers For Indirect Addressing of The S7-200 Memory AreaslakseNo ratings yet
- Assignment 2 - Group B - QS 300LDocument6 pagesAssignment 2 - Group B - QS 300LOdeniyi JeremiahNo ratings yet
- OrDocument3 pagesOrsatishsaga1990No ratings yet
- Compal Confidential: QIWG7 DIS M/B Schematics DocumentDocument5 pagesCompal Confidential: QIWG7 DIS M/B Schematics DocumentКирилл ГулякевичNo ratings yet
- Panasonic LCD TH-L32C30Document72 pagesPanasonic LCD TH-L32C30King King0% (1)
- BobliDocument2 pagesBoblisuman karNo ratings yet
- Lab Manual (Text)Document41 pagesLab Manual (Text)tuan nguyenNo ratings yet
- POTTER ROEMER® 2500 Series 1 '' HOSE RACK ASSEMBLIESDocument1 pagePOTTER ROEMER® 2500 Series 1 '' HOSE RACK ASSEMBLIESrvalentino2012No ratings yet
- Global Wine IndustryDocument134 pagesGlobal Wine IndustrySaifur Rahman Steve100% (2)
- General Properties of Engineering MaterialsDocument9 pagesGeneral Properties of Engineering MaterialsRoderick VillanuevaNo ratings yet
- A Study of Emotional IntelligeDocument6 pagesA Study of Emotional Intelligekashish behlNo ratings yet
- Remanufactured Genuine Parts CatalogueDocument22 pagesRemanufactured Genuine Parts CatalogueHenrique CorreiaNo ratings yet
- New Opportunities in Transmission Electron Microscopy of PolymersDocument30 pagesNew Opportunities in Transmission Electron Microscopy of PolymersJoão Vitor ZanattaNo ratings yet
- GEC PE003 Module 1 CheckedDocument21 pagesGEC PE003 Module 1 CheckedJianica SalesNo ratings yet
- Structral DatasheetDocument254 pagesStructral DatasheetdeepakNo ratings yet