Download as pdf or txt
You might also like
- RT Formulas For CalculationsDocument15 pagesRT Formulas For CalculationsAwais Jamil73% (11)
- Print Page - Serbian Professor Savic Sonic Water Heater Replication COP 12Document334 pagesPrint Page - Serbian Professor Savic Sonic Water Heater Replication COP 12Bastien Gall de SilléNo ratings yet
- Powerware 9305 20-80 Kwa PDFDocument520 pagesPowerware 9305 20-80 Kwa PDFalex80% (5)
- 2 Free Vibration of A CantileverDocument5 pages2 Free Vibration of A CantileverJustin LimNo ratings yet
- Feynman Lectures Simplified 1B: Harmonic Oscillators, & ThermodynamicsFrom EverandFeynman Lectures Simplified 1B: Harmonic Oscillators, & ThermodynamicsNo ratings yet
- IET Wiring Regulations 18 EditionDocument34 pagesIET Wiring Regulations 18 EditionSimon Rae100% (1)
- NTDC InterviewDocument4 pagesNTDC InterviewWaqas Ahmed100% (1)
- 25 Clicker QuestionsDocument20 pages25 Clicker QuestionsFuentesBrisbaneNo ratings yet
- Structural Dynamics by Finite ElementsDocument308 pagesStructural Dynamics by Finite ElementsLuis Ortiz71% (7)
- Mosfet Based ChopperDocument12 pagesMosfet Based Chopperarunkumar0% (1)
- Base ExcitationDocument51 pagesBase ExcitationAjitsingh JagtapNo ratings yet
- Engineering VibrationsDocument43 pagesEngineering VibrationsClayton Roe100% (3)
- PPT - Ch1 1to1 3 192069 PDFDocument44 pagesPPT - Ch1 1to1 3 192069 PDFYousef SardahiNo ratings yet
- Physics InterferenceDocument23 pagesPhysics InterferencechutiyaaaNo ratings yet
- Chapter 3Document35 pagesChapter 3alikhalidd23No ratings yet
- wk4 Lectrure4 23oct2018Document21 pageswk4 Lectrure4 23oct2018هاني احمدNo ratings yet
- Apcs 2016Document2 pagesApcs 2016アスリアナ イブラヒムNo ratings yet
- Brochure Polyurethane Materials For Vibration Isolation ENDocument12 pagesBrochure Polyurethane Materials For Vibration Isolation ENymukhtar897No ratings yet
- Foundations of Mems 2nd Edition Chang Liu Solutions ManualDocument10 pagesFoundations of Mems 2nd Edition Chang Liu Solutions Manualfinificcodille6d3h100% (22)
- Lab Manual: ME-411 Mechanical Engineering Laboratory - IVDocument23 pagesLab Manual: ME-411 Mechanical Engineering Laboratory - IVShashank KumarNo ratings yet
- Damping Effects On Shock Response Spectra: 1.8-Inch Disk DrivesDocument8 pagesDamping Effects On Shock Response Spectra: 1.8-Inch Disk DrivesDani Quirante Flaaut EtcNo ratings yet
- Dynamics Tutorial 11-Damped Vibrations-13p PDFDocument13 pagesDynamics Tutorial 11-Damped Vibrations-13p PDFmanfredm6435100% (1)
- Lesson 3 - Harmonically Excited VibrationDocument80 pagesLesson 3 - Harmonically Excited VibrationIzzat IkramNo ratings yet
- R10 Notes PDFDocument6 pagesR10 Notes PDFSumanta DuttaNo ratings yet
- Photoelectric EffectDocument3 pagesPhotoelectric EffectBIALIGYNo ratings yet
- Dynamics - Chapter 19 (Beer7)Document32 pagesDynamics - Chapter 19 (Beer7)api-3709496100% (2)
- Finite Element and Boundary Methods (ME 613) Assignment-1Document20 pagesFinite Element and Boundary Methods (ME 613) Assignment-1Nishant GuptaNo ratings yet
- Free VibrationDocument11 pagesFree VibrationEz99100% (1)
- DOM M S D F Harmonical Excited Vibration 1Document90 pagesDOM M S D F Harmonical Excited Vibration 1Prajapati DhavalNo ratings yet
- Experiment A1 - Vibration Absorber - AR Copy September2008Document12 pagesExperiment A1 - Vibration Absorber - AR Copy September2008Pawan Kumar YadavNo ratings yet
- Problems and Solutions Section 1.1 (1.1 Through 1.26)Document17 pagesProblems and Solutions Section 1.1 (1.1 Through 1.26)choiNo ratings yet
- MEMS Design Chap 3 (P1-New) - THEORY and STRUCTUREDocument36 pagesMEMS Design Chap 3 (P1-New) - THEORY and STRUCTUREvuonglupNo ratings yet
- Discussion Week1 SolutionsDocument5 pagesDiscussion Week1 SolutionsChisondiNo ratings yet
- CH 2Document25 pagesCH 2dawit abebualNo ratings yet
- Free VibrationDocument5 pagesFree VibrationLokesh DandgavalNo ratings yet
- Tutorial 1 - Basic Engineering Science: Instrumentation and ControlDocument6 pagesTutorial 1 - Basic Engineering Science: Instrumentation and ControlMohd A IshakNo ratings yet
- Instrumentation Training Tutorial1 PDFDocument6 pagesInstrumentation Training Tutorial1 PDFMOHAMED SHARKAWINo ratings yet
- Tutorial 1 - Basic Engineering Science: Instrumentation and ControlDocument6 pagesTutorial 1 - Basic Engineering Science: Instrumentation and Control@@ngNo ratings yet
- Tutorial 1 - Basic Engineering Science: Instrumentation and ControlDocument6 pagesTutorial 1 - Basic Engineering Science: Instrumentation and Controls_waqarNo ratings yet
- Instrumentation Training Tutorial Part1Document6 pagesInstrumentation Training Tutorial Part1Gary8100% (1)
- 7.IITD 2012 Theory of VibrationDocument9 pages7.IITD 2012 Theory of Vibrationlaith adnanNo ratings yet
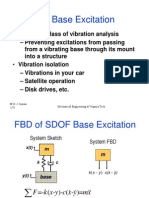
- 2.4 Base Excitation: - Important Class of Vibration Analysis - Preventing Excitations From PassingDocument51 pages2.4 Base Excitation: - Important Class of Vibration Analysis - Preventing Excitations From Passingpriyankar007No ratings yet
- Chapter 5Document10 pagesChapter 5engineeringnotes38480No ratings yet
- Coherent Sources, Conditions of Interference, Interference in Plane Parallel Thin FilmsDocument14 pagesCoherent Sources, Conditions of Interference, Interference in Plane Parallel Thin FilmsKashish GulatiNo ratings yet
- Unit 01Document85 pagesUnit 0120MEB005M SHAHIRIYAR SHAFINo ratings yet
- Damping FantasticDocument20 pagesDamping FantastickapolaNo ratings yet
- Microsoft Word - SOM Contents and PrefaceDocument429 pagesMicrosoft Word - SOM Contents and Prefacebrendonsithole6No ratings yet
- ME312 Lab Manual 2021 - Cantilever BeamDocument7 pagesME312 Lab Manual 2021 - Cantilever BeamPranav BajajNo ratings yet
- 03 Free VibrationDocument24 pages03 Free VibrationnonaNo ratings yet
- Pkumar DiffractionDocument76 pagesPkumar DiffractionSouradeep GuptaNo ratings yet
- Finite Element Analysis: Level 6, Semester 1&2 2022-2023Document23 pagesFinite Element Analysis: Level 6, Semester 1&2 2022-2023Sara HaiderNo ratings yet
- Instrumentation BasicsTrainingDocument59 pagesInstrumentation BasicsTrainingSurya SenthilnathanNo ratings yet
- Instrumentation Training Tutorial1 PDFDocument6 pagesInstrumentation Training Tutorial1 PDFchdiNo ratings yet
- Combine PDFDocument99 pagesCombine PDFdilnasgsjwisnjNo ratings yet
- Force TransmissibilityDocument3 pagesForce TransmissibilityMradul YadavNo ratings yet
- Nuclear Magnetic ResonanceDocument28 pagesNuclear Magnetic Resonancecukdbjsisns shsusbsbvzNo ratings yet
- Section 1.8 Stability: Stability Is Defined For The Solution of Free Response CaseDocument24 pagesSection 1.8 Stability: Stability Is Defined For The Solution of Free Response CaserajasekharjvNo ratings yet
- Preliminary Examination in Dynamics: p (t) =Asinω t) that inducesDocument35 pagesPreliminary Examination in Dynamics: p (t) =Asinω t) that inducesAS asNo ratings yet
- Slides.2.dynamics Lund 2017 Tomasi PDFDocument22 pagesSlides.2.dynamics Lund 2017 Tomasi PDFAnil KumarNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterFrom EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterNo ratings yet
- Unified Field Theory in a Nutshell1: The Quest for the Theory of EverythingFrom EverandUnified Field Theory in a Nutshell1: The Quest for the Theory of EverythingNo ratings yet
- Feynman Lectures Simplified 2B: Magnetism & ElectrodynamicsFrom EverandFeynman Lectures Simplified 2B: Magnetism & ElectrodynamicsNo ratings yet
- Intensity of Electromagnetic Waves as a Function of Frequency, Source Distance and Aperture AngleFrom EverandIntensity of Electromagnetic Waves as a Function of Frequency, Source Distance and Aperture AngleNo ratings yet
- Professional Synopsis:: Kunal AnarseDocument2 pagesProfessional Synopsis:: Kunal AnarseAjitsingh JagtapNo ratings yet
- Base ExcitationDocument51 pagesBase ExcitationAjitsingh JagtapNo ratings yet
- Kunal Anarse: Professional SynopsisDocument3 pagesKunal Anarse: Professional SynopsisAjitsingh JagtapNo ratings yet
- Gaseous FuelsDocument24 pagesGaseous FuelsAjitsingh JagtapNo ratings yet
- Consolidated Question Bank 4Document3 pagesConsolidated Question Bank 4Ajitsingh JagtapNo ratings yet
- Water Softening MethodsDocument34 pagesWater Softening MethodsAjitsingh Jagtap100% (1)
- Solid FuelsDocument46 pagesSolid FuelsAjitsingh JagtapNo ratings yet
- Safe/Happy/ Stress Free: Make A Work EnvironmentDocument19 pagesSafe/Happy/ Stress Free: Make A Work EnvironmentAjitsingh JagtapNo ratings yet
- Operations Research Tutorial ProblemDocument4 pagesOperations Research Tutorial ProblemAjitsingh JagtapNo ratings yet
- Job Safety AnalysisDocument22 pagesJob Safety AnalysisAjitsingh JagtapNo ratings yet
- Dispersion ModelsDocument36 pagesDispersion ModelsAjitsingh Jagtap100% (1)
- 9) Tutorial Problem PDFDocument4 pages9) Tutorial Problem PDFAjitsingh JagtapNo ratings yet
- Secant MethodDocument49 pagesSecant MethodAjitsingh JagtapNo ratings yet
- Chemical EngineeringDocument44 pagesChemical EngineeringAjitsingh JagtapNo ratings yet
- Experiment 7: InputDocument6 pagesExperiment 7: InputAjitsingh JagtapNo ratings yet
- Cat-I QPDocument2 pagesCat-I QPAjitsingh JagtapNo ratings yet
- Nano MaterialsDocument44 pagesNano MaterialsAjitsingh Jagtap100% (1)
- Chemical EngineeringDocument44 pagesChemical EngineeringAjitsingh JagtapNo ratings yet
- CourseAllotted - Report - 26 12 2016 - 17 17 04Document448 pagesCourseAllotted - Report - 26 12 2016 - 17 17 04Ajitsingh Jagtap100% (1)
- EMA M5 Ktunotes - in - ttt7Document45 pagesEMA M5 Ktunotes - in - ttt7Sonu MeenaNo ratings yet
- NGR Sizing and Selection As Per IEEEDocument47 pagesNGR Sizing and Selection As Per IEEEutshab.ghosh2023No ratings yet
- Classical Yang MillsDocument7 pagesClassical Yang MillspbskimiaNo ratings yet
- Automatic Balancing Valves ASV: Data SheetDocument28 pagesAutomatic Balancing Valves ASV: Data SheetmohdkamalhaziqNo ratings yet
- Star Delta StarterDocument40 pagesStar Delta Startersupermannon100% (1)
- SLD Jiti PDFDocument2 pagesSLD Jiti PDFJanitha HettiarachchiNo ratings yet
- 5.2.2h Surface Area of PrismsDocument16 pages5.2.2h Surface Area of Prismsdr.taim.09No ratings yet
- Liebert EXS 10-60 kVADocument57 pagesLiebert EXS 10-60 kVAgaris24bNo ratings yet
- Isaac Gcse Physics Book Teacher VersionDocument116 pagesIsaac Gcse Physics Book Teacher VersionhappyproofNo ratings yet
- Darcy-Weisbach Equation - Wikipedia, The Free EncyclopediaDocument3 pagesDarcy-Weisbach Equation - Wikipedia, The Free Encyclopediadonodoni0008No ratings yet
- Myvariable Frequency Drive: by Pritam SenDocument69 pagesMyvariable Frequency Drive: by Pritam SenArindam Samanta100% (2)
- Chapter 2 SolutionsDocument28 pagesChapter 2 SolutionsOmy BiryaniNo ratings yet
- Chapter - 6 - FUNDAMENTALS OF CONVECTIONDocument56 pagesChapter - 6 - FUNDAMENTALS OF CONVECTIONBT20MEC058AdeshNo ratings yet
- QCVN 09 2017 BXD ENGLISH Unofficial Translation by VGBCDocument20 pagesQCVN 09 2017 BXD ENGLISH Unofficial Translation by VGBCTrần TùngNo ratings yet
- Kinetic and Potential Energy Worksheet NameDocument3 pagesKinetic and Potential Energy Worksheet NameNgwee Lambang PacateNo ratings yet
- ELECTROSTATICSDocument23 pagesELECTROSTATICSRaj RastogiNo ratings yet
- Z Source Inverter For Ups ApplicationsDocument12 pagesZ Source Inverter For Ups Applicationsnikhil naniNo ratings yet
- Cooling Tower-ExcelDocument14 pagesCooling Tower-ExcelpartoNo ratings yet
- Hewitt Physics Chapter 2Document4 pagesHewitt Physics Chapter 2magiclcjNo ratings yet
- Media and Information LiteracyDocument31 pagesMedia and Information LiteracyLukman AndalNo ratings yet
- Lect. 2 The Wave Functions and Probability Densities For A Particle in A Rigid BoxDocument17 pagesLect. 2 The Wave Functions and Probability Densities For A Particle in A Rigid Boxdarkdragon9003No ratings yet
- M3D Solution Sheet - 1Document53 pagesM3D Solution Sheet - 1Koushik BiswasNo ratings yet
- Cours Us AteqDocument73 pagesCours Us AteqNico VNo ratings yet