
Wanbejuri 2019
Wanbejuri 2019
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Age of Steel PDFDocument123 pagesAge of Steel PDFAlex Palma100% (5)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Eero Saarinen: A Selective BibliographyDocument17 pagesEero Saarinen: A Selective Bibliographymariocapela86No ratings yet
- Confidential Proposal For Utem (FTMK) Research Collaboration 1. ObjectiveDocument2 pagesConfidential Proposal For Utem (FTMK) Research Collaboration 1. ObjectivedunbukitpermaiNo ratings yet
- Ijeecs 1Document5 pagesIjeecs 1dunbukitpermaiNo ratings yet
- Confidential Proposal For Utem (FTMK) Research Collaboration 1. ObjectiveDocument2 pagesConfidential Proposal For Utem (FTMK) Research Collaboration 1. ObjectivedunbukitpermaiNo ratings yet
- Ijatcse 321952020Document8 pagesIjatcse 321952020dunbukitpermaiNo ratings yet
- C Research MilestoneDocument1 pageC Research MilestonedunbukitpermaiNo ratings yet
- Research Gantt Chart: 2014 2015 Activities Apr May June July Aug Sept Oct Nov Dec Jan Feb Mar Apr May JuneDocument1 pageResearch Gantt Chart: 2014 2015 Activities Apr May June July Aug Sept Oct Nov Dec Jan Feb Mar Apr May JunedunbukitpermaiNo ratings yet
- C. Research Milestones CDocument1 pageC. Research Milestones CdunbukitpermaiNo ratings yet
- Appendix A Research Flow Chart: StartDocument1 pageAppendix A Research Flow Chart: StartdunbukitpermaiNo ratings yet
- B. Research Gantt Chart GDocument1 pageB. Research Gantt Chart GdunbukitpermaiNo ratings yet
- A. Research Flow Chart HiDocument1 pageA. Research Flow Chart HidunbukitpermaiNo ratings yet
- Receipt AccountingDocument24 pagesReceipt AccountingRohit Khairnar100% (1)
- Safety Induction Quotation REVDocument4 pagesSafety Induction Quotation REVAtmadosNo ratings yet
- Introduction To Rolling Element Bearing Manufacturing ProcessDocument18 pagesIntroduction To Rolling Element Bearing Manufacturing ProcessRamakanth P JoshiNo ratings yet
- 6.2 Meter Earth Station Antenna: General Description Highlighted FeaturesDocument2 pages6.2 Meter Earth Station Antenna: General Description Highlighted FeaturesSimon AtanganaNo ratings yet
- Advanced and Multivariate Statistical Methods: Practical Application and InterpretationDocument18 pagesAdvanced and Multivariate Statistical Methods: Practical Application and InterpretationAticha KwaengsophaNo ratings yet
- Sewage Treatment Plant - Operation Manual PDFDocument64 pagesSewage Treatment Plant - Operation Manual PDFDinhQuangDat100% (1)
- DP DME Product Sheet ENUDocument2 pagesDP DME Product Sheet ENUVictor SfeclaNo ratings yet
- The Rise of Biometric CardsDocument66 pagesThe Rise of Biometric CardstyempuserNo ratings yet
- DistillationDocument14 pagesDistillationThe MatrixNo ratings yet
- Iso 9000Document48 pagesIso 9000Mustansir Ezzi0% (1)
- Course Coverage ReportDocument5 pagesCourse Coverage ReportAnnie Isabella100% (1)
- Mechanical Design of Electornics Products: 1 4 T H S e P - 2 0 1 6 T o 1 7 T H S e P 2 0 1 6Document4 pagesMechanical Design of Electornics Products: 1 4 T H S e P - 2 0 1 6 T o 1 7 T H S e P 2 0 1 6rkumar ilearnNo ratings yet
- Loadcell Supplement: Rds Pro-Series Apollo 8000 Spreader ControllerDocument14 pagesLoadcell Supplement: Rds Pro-Series Apollo 8000 Spreader ControllerMatt RoesnerNo ratings yet
- TrackWise Regulatory AffairsDocument2 pagesTrackWise Regulatory Affairsnsk79in@gmail.comNo ratings yet
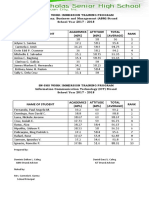
- Name of Student Academics (40%) Attitude (60%) Total (Average) RankDocument3 pagesName of Student Academics (40%) Attitude (60%) Total (Average) RankDominic Dalton CalingNo ratings yet
- Sph3U: Practice Test: Kinematics Multiple ChoiceDocument5 pagesSph3U: Practice Test: Kinematics Multiple ChoiceKamil Ali farahNo ratings yet
- Technical - Description Robox - Lobe - ENG r1 211117Document20 pagesTechnical - Description Robox - Lobe - ENG r1 211117Nirmal KumarNo ratings yet
- K071 - Main Control ProcessorDocument2 pagesK071 - Main Control ProcessorMos CraciunNo ratings yet
- Numerology GR8 4 BUSINESS ..Document3 pagesNumerology GR8 4 BUSINESS ..Michael PadillaNo ratings yet
- (Exce) Pipe Flow 2-Multiphase Flow Assurance-Ove Bratland-2010Document372 pages(Exce) Pipe Flow 2-Multiphase Flow Assurance-Ove Bratland-2010Hoang Nguyen Minh100% (1)
- Endress Level Measurement Selection Guide (En)Document34 pagesEndress Level Measurement Selection Guide (En)negrin0% (1)
- Boitumelo Mall Drawing Pack PMDocument8 pagesBoitumelo Mall Drawing Pack PMapi-232599971No ratings yet
- RNM-12 400Document18 pagesRNM-12 400Matija ŠobanNo ratings yet
- Marketing Director in Los Angeles CA Resume Kelley CarrollDocument2 pagesMarketing Director in Los Angeles CA Resume Kelley CarrollKelleyCarrollNo ratings yet
- Kyocera Mita - Trouble Error Codes ListDocument48 pagesKyocera Mita - Trouble Error Codes ListPedro Severo100% (1)
- Company Profile Prodbtech PVT LTD PuneDocument3 pagesCompany Profile Prodbtech PVT LTD PuneAashish upadhyayNo ratings yet
- HM15009EDocument8 pagesHM15009EYoni EhmNo ratings yet
- KPI - Objectives Achievement PlanDocument4 pagesKPI - Objectives Achievement PlaninsaanNo ratings yet
















































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Age of Steel PDFDocument123 pagesAge of Steel PDFAlex Palma100% (5)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Eero Saarinen: A Selective BibliographyDocument17 pagesEero Saarinen: A Selective Bibliographymariocapela86No ratings yet
- Confidential Proposal For Utem (FTMK) Research Collaboration 1. ObjectiveDocument2 pagesConfidential Proposal For Utem (FTMK) Research Collaboration 1. ObjectivedunbukitpermaiNo ratings yet
- Ijeecs 1Document5 pagesIjeecs 1dunbukitpermaiNo ratings yet
- Confidential Proposal For Utem (FTMK) Research Collaboration 1. ObjectiveDocument2 pagesConfidential Proposal For Utem (FTMK) Research Collaboration 1. ObjectivedunbukitpermaiNo ratings yet
- Ijatcse 321952020Document8 pagesIjatcse 321952020dunbukitpermaiNo ratings yet
- C Research MilestoneDocument1 pageC Research MilestonedunbukitpermaiNo ratings yet
- Research Gantt Chart: 2014 2015 Activities Apr May June July Aug Sept Oct Nov Dec Jan Feb Mar Apr May JuneDocument1 pageResearch Gantt Chart: 2014 2015 Activities Apr May June July Aug Sept Oct Nov Dec Jan Feb Mar Apr May JunedunbukitpermaiNo ratings yet
- C. Research Milestones CDocument1 pageC. Research Milestones CdunbukitpermaiNo ratings yet
- Appendix A Research Flow Chart: StartDocument1 pageAppendix A Research Flow Chart: StartdunbukitpermaiNo ratings yet
- B. Research Gantt Chart GDocument1 pageB. Research Gantt Chart GdunbukitpermaiNo ratings yet
- A. Research Flow Chart HiDocument1 pageA. Research Flow Chart HidunbukitpermaiNo ratings yet
- Receipt AccountingDocument24 pagesReceipt AccountingRohit Khairnar100% (1)
- Safety Induction Quotation REVDocument4 pagesSafety Induction Quotation REVAtmadosNo ratings yet
- Introduction To Rolling Element Bearing Manufacturing ProcessDocument18 pagesIntroduction To Rolling Element Bearing Manufacturing ProcessRamakanth P JoshiNo ratings yet
- 6.2 Meter Earth Station Antenna: General Description Highlighted FeaturesDocument2 pages6.2 Meter Earth Station Antenna: General Description Highlighted FeaturesSimon AtanganaNo ratings yet
- Advanced and Multivariate Statistical Methods: Practical Application and InterpretationDocument18 pagesAdvanced and Multivariate Statistical Methods: Practical Application and InterpretationAticha KwaengsophaNo ratings yet
- Sewage Treatment Plant - Operation Manual PDFDocument64 pagesSewage Treatment Plant - Operation Manual PDFDinhQuangDat100% (1)
- DP DME Product Sheet ENUDocument2 pagesDP DME Product Sheet ENUVictor SfeclaNo ratings yet
- The Rise of Biometric CardsDocument66 pagesThe Rise of Biometric CardstyempuserNo ratings yet
- DistillationDocument14 pagesDistillationThe MatrixNo ratings yet
- Iso 9000Document48 pagesIso 9000Mustansir Ezzi0% (1)
- Course Coverage ReportDocument5 pagesCourse Coverage ReportAnnie Isabella100% (1)
- Mechanical Design of Electornics Products: 1 4 T H S e P - 2 0 1 6 T o 1 7 T H S e P 2 0 1 6Document4 pagesMechanical Design of Electornics Products: 1 4 T H S e P - 2 0 1 6 T o 1 7 T H S e P 2 0 1 6rkumar ilearnNo ratings yet
- Loadcell Supplement: Rds Pro-Series Apollo 8000 Spreader ControllerDocument14 pagesLoadcell Supplement: Rds Pro-Series Apollo 8000 Spreader ControllerMatt RoesnerNo ratings yet
- TrackWise Regulatory AffairsDocument2 pagesTrackWise Regulatory Affairsnsk79in@gmail.comNo ratings yet
- Name of Student Academics (40%) Attitude (60%) Total (Average) RankDocument3 pagesName of Student Academics (40%) Attitude (60%) Total (Average) RankDominic Dalton CalingNo ratings yet
- Sph3U: Practice Test: Kinematics Multiple ChoiceDocument5 pagesSph3U: Practice Test: Kinematics Multiple ChoiceKamil Ali farahNo ratings yet
- Technical - Description Robox - Lobe - ENG r1 211117Document20 pagesTechnical - Description Robox - Lobe - ENG r1 211117Nirmal KumarNo ratings yet
- K071 - Main Control ProcessorDocument2 pagesK071 - Main Control ProcessorMos CraciunNo ratings yet
- Numerology GR8 4 BUSINESS ..Document3 pagesNumerology GR8 4 BUSINESS ..Michael PadillaNo ratings yet
- (Exce) Pipe Flow 2-Multiphase Flow Assurance-Ove Bratland-2010Document372 pages(Exce) Pipe Flow 2-Multiphase Flow Assurance-Ove Bratland-2010Hoang Nguyen Minh100% (1)
- Endress Level Measurement Selection Guide (En)Document34 pagesEndress Level Measurement Selection Guide (En)negrin0% (1)
- Boitumelo Mall Drawing Pack PMDocument8 pagesBoitumelo Mall Drawing Pack PMapi-232599971No ratings yet
- RNM-12 400Document18 pagesRNM-12 400Matija ŠobanNo ratings yet
- Marketing Director in Los Angeles CA Resume Kelley CarrollDocument2 pagesMarketing Director in Los Angeles CA Resume Kelley CarrollKelleyCarrollNo ratings yet
- Kyocera Mita - Trouble Error Codes ListDocument48 pagesKyocera Mita - Trouble Error Codes ListPedro Severo100% (1)
- Company Profile Prodbtech PVT LTD PuneDocument3 pagesCompany Profile Prodbtech PVT LTD PuneAashish upadhyayNo ratings yet
- HM15009EDocument8 pagesHM15009EYoni EhmNo ratings yet
- KPI - Objectives Achievement PlanDocument4 pagesKPI - Objectives Achievement PlaninsaanNo ratings yet