
En 21 493 494
En 21 493 494
You might also like
- Nutritional Assessment 7Th Ed 7Th Edition David C Nieman Full ChapterDocument67 pagesNutritional Assessment 7Th Ed 7Th Edition David C Nieman Full Chaptercharles.martinez668100% (9)
- Problem-Oriented Medical Diagnosis 7thDocument228 pagesProblem-Oriented Medical Diagnosis 7thnhtoan3286% (7)
- IOM NetProDual Daikin Rev 4 PDFDocument15 pagesIOM NetProDual Daikin Rev 4 PDFVin Ken0% (1)
- CE Module 22 - Open Channel and Weirs (Principle)Document3 pagesCE Module 22 - Open Channel and Weirs (Principle)Angelice Alliah De la CruzNo ratings yet
- N9 and N10 With SCR (2014 - 2016) : Engine Wiring Diagram Engine Control Module (ECM)Document4 pagesN9 and N10 With SCR (2014 - 2016) : Engine Wiring Diagram Engine Control Module (ECM)Phil B.No ratings yet
- Radiography and Radiology BSAVADocument402 pagesRadiography and Radiology BSAVALaura Colorado100% (2)
- Manual Whirlpool AWSX 63213Document2 pagesManual Whirlpool AWSX 63213Marius Dedal0% (1)
- Service Training 2005Document76 pagesService Training 2005Heidi Cuevas Venegas100% (1)
- Head Loss Calculation Head Loss Calculation Using: No. DN MM M MM L/s 1/1 M M/sDocument23 pagesHead Loss Calculation Head Loss Calculation Using: No. DN MM M MM L/s 1/1 M M/sMohamedHanyNo ratings yet
- Overhaul s51 s53 s54Document29 pagesOverhaul s51 s53 s54YadiNo ratings yet
- Missal Song (Oct. 20, 2012)Document132 pagesMissal Song (Oct. 20, 2012)comeasoneNo ratings yet
- Prometheus Prometheus Texto Y Atlas de Anatomia Prometheus Textbook and Anatomy Atlas Spanish Edition by Michael SchunkeErik SchulteUdo SchumacherDocument6 pagesPrometheus Prometheus Texto Y Atlas de Anatomia Prometheus Textbook and Anatomy Atlas Spanish Edition by Michael SchunkeErik SchulteUdo SchumacherYukii Triby-a AnniimesztNo ratings yet
- Encoder HEDL 9140 500 CPT, 3 Channels, With Line Driver RS 422Document2 pagesEncoder HEDL 9140 500 CPT, 3 Channels, With Line Driver RS 422Luka MadridNo ratings yet
- Encoder HEDS 5540, 500 Counts Per Turn, 3 Channels: Order Number TypeDocument1 pageEncoder HEDS 5540, 500 Counts Per Turn, 3 Channels: Order Number TypevondutchlgNo ratings yet
- Maxon Datasheet EncoderDocument1 pageMaxon Datasheet EncoderRatanieriNo ratings yet
- Catalog Encoder MILEDocument1 pageCatalog Encoder MILELucas SuplinoNo ratings yet
- R SignDocument35 pagesR SignRichard Andrianjaka LuckyNo ratings yet
- 1 X TRIGON L Plus Boiler LLH 1CT Heating Circuit 1 DHW Circuit With A CalorifierDocument4 pages1 X TRIGON L Plus Boiler LLH 1CT Heating Circuit 1 DHW Circuit With A Calorifieradyro12No ratings yet
- Case Study - Unexpected Vibraion On A Centrifugal Compressor Caused by Vibration Probe SupportDocument23 pagesCase Study - Unexpected Vibraion On A Centrifugal Compressor Caused by Vibration Probe SupportLong Nguyen100% (1)
- FICHA TECNICA ResMED VPAP ST PDFDocument2 pagesFICHA TECNICA ResMED VPAP ST PDFfundacion para el cuidado criticoNo ratings yet
- Free Vintage Style Poster of Fundamentals of PowerDocument1 pageFree Vintage Style Poster of Fundamentals of PowerSaif HimelNo ratings yet
- Ild 22Document1 pageIld 22Felipe GarciaNo ratings yet
- Frequency Response TesterDocument7 pagesFrequency Response TesterVasileSpireaNo ratings yet
- Frequency Response TesterDocument7 pagesFrequency Response TesterVasileSpireaNo ratings yet
- Transformer With On-Load Tap-Changer: Shandong Dachi Electric Co, LTDDocument1 pageTransformer With On-Load Tap-Changer: Shandong Dachi Electric Co, LTDArjunansyah LakidendeNo ratings yet
- SPE Reelwell Drilling MethodDocument9 pagesSPE Reelwell Drilling Methodraj kumarNo ratings yet
- Ec140b 09Document6 pagesEc140b 09Fadli HernandoNo ratings yet
- MS 13 66Document2 pagesMS 13 66nurockNo ratings yet
- EBM A2E AxialFanInChillerDocument10 pagesEBM A2E AxialFanInChillerwillratNo ratings yet
- MATLABDocument1 pageMATLABbenie1No ratings yet
- Analog 2018 End SemDocument4 pagesAnalog 2018 End SemVibhinn SinghalNo ratings yet
- Half Wave Rectifier: Instruction CircuitDocument2 pagesHalf Wave Rectifier: Instruction CircuitPriyaharshini RaviNo ratings yet
- Ebm papst Noise level test standardDocument2 pagesEbm papst Noise level test standardRHETT BUTLERNo ratings yet
- EBRO HP114-C High Performance Butterfly ValveDocument4 pagesEBRO HP114-C High Performance Butterfly ValveAakash TanwarNo ratings yet
- Grafico de La Bomba de RHDocument1 pageGrafico de La Bomba de RHJherson PantojaNo ratings yet
- ZAvblueDocument166 pagesZAvblueJuan NuñezNo ratings yet
- Electro-Hydraulic I/H Converter and WSR Way ValveDocument12 pagesElectro-Hydraulic I/H Converter and WSR Way ValveNAYEEM100% (1)
- Power Factor Meter: FeaturesDocument1 pagePower Factor Meter: FeaturesMin ZayarNo ratings yet
- Timer ModulesDocument12 pagesTimer ModulesMai Thế ToanNo ratings yet
- Low Frequency Characteristic Analysis of Voltage Mode Boost ConverterDocument4 pagesLow Frequency Characteristic Analysis of Voltage Mode Boost Converterkakkunuru kashyapNo ratings yet
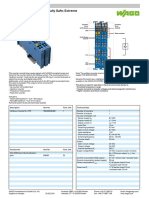
- Up/Down Counter Intrinsically Safe Extreme: A B C D A B C DDocument2 pagesUp/Down Counter Intrinsically Safe Extreme: A B C D A B C DIsaac FernándezNo ratings yet
- En AX10u 17uDocument2 pagesEn AX10u 17uYakupovmmNo ratings yet
- Extending SteinbergDocument35 pagesExtending SteinbergelmerocabronNo ratings yet
- Expt No: Date:: Load Test On Kaplan TurbineDocument4 pagesExpt No: Date:: Load Test On Kaplan TurbineAlex ChollackalNo ratings yet
- Almana: Schedule of Loads For Panel Board 1 (Lp-1) L.O. & C.O Schedule of Loads For Panel Board 2 (Pp1)Document4 pagesAlmana: Schedule of Loads For Panel Board 1 (Lp-1) L.O. & C.O Schedule of Loads For Panel Board 2 (Pp1)Jet ArcaNo ratings yet
- Slipway Pulley Foundation - 5 (16!05!19) (1) - ModelDocument1 pageSlipway Pulley Foundation - 5 (16!05!19) (1) - ModelA.K.M Shafiq MondolNo ratings yet
- Folleto Ham-Let Valvulas de Instrumentacion y ConectoresDocument2 pagesFolleto Ham-Let Valvulas de Instrumentacion y ConectoresRicardo Cabrera OsinagaNo ratings yet
- 4100nu 772380Document2 pages4100nu 772380Mat FraboNo ratings yet
- AMPLIFICADOR OPERACIONAL Ua741Document5 pagesAMPLIFICADOR OPERACIONAL Ua741lgotthelfNo ratings yet
- Pneumatic Conveying Solutions - Palamatic Process - Non Protege 0-23Document1 pagePneumatic Conveying Solutions - Palamatic Process - Non Protege 0-23parth sapariaNo ratings yet
- 16 TodayDocument1 page16 TodayAVD CONSTRUCTIONSNo ratings yet
- Timer - Counter - Tachometer CTADocument2 pagesTimer - Counter - Tachometer CTALeonardoMartinNo ratings yet
- 9 P P Part IV Bridge 31 To 40Document10 pages9 P P Part IV Bridge 31 To 40IdreesNo ratings yet
- Timer - Counter - Tachometer CTADocument2 pagesTimer - Counter - Tachometer CTAJaudiel CarrerasNo ratings yet
- Motion in A Plane 1 Page NotesDocument1 pageMotion in A Plane 1 Page Notessafeeurrahmanazmi104No ratings yet
- National 163q-4 Hp-165 PerformanceDocument2 pagesNational 163q-4 Hp-165 Performancejhonny barrantesNo ratings yet
- Generator Troubleshooting AdjustmentDocument13 pagesGenerator Troubleshooting AdjustmentZubair ArshadNo ratings yet
- Honeywell ModutrolIVMotor M94 Iom D1190 632195Document12 pagesHoneywell ModutrolIVMotor M94 Iom D1190 632195Jonathan Basilio GomezNo ratings yet
- E60H Series: Rotary EncoderDocument1 pageE60H Series: Rotary EncoderkopihitammorningbakeryNo ratings yet
- HEGN (Hurghada Intl)Document10 pagesHEGN (Hurghada Intl)Seyi WilliamsNo ratings yet
- 02 Grav Exe Gro Fe R+1 BS 311 0B PDFDocument1 page02 Grav Exe Gro Fe R+1 BS 311 0B PDFNguyen Khac DatNo ratings yet
- Drawing For 8kw Duct Heater (1.5kwx4,1kwx2)Document9 pagesDrawing For 8kw Duct Heater (1.5kwx4,1kwx2)Balamurugan ArumugamNo ratings yet
- 2-Viscous Flow in Pipe Energy SystemsDocument6 pages2-Viscous Flow in Pipe Energy SystemsDN CoverNo ratings yet
- Vacuum Pumps For Table Top Steam Autoclaves: Application BrochureDocument8 pagesVacuum Pumps For Table Top Steam Autoclaves: Application Brochurenotaden1849No ratings yet
- TV and CRT Display Vertical Output IC With Bus Control SupportDocument4 pagesTV and CRT Display Vertical Output IC With Bus Control SupportLuis RinconNo ratings yet
- Data Sheet enDocument2 pagesData Sheet enZoltán SoósNo ratings yet
- Eng DS R36as A4Document3 pagesEng DS R36as A4Zoltán SoósNo ratings yet
- Eng Ds Xftc310 A4Document4 pagesEng Ds Xftc310 A4Zoltán SoósNo ratings yet
- Eng Ds Xftc300 A5Document4 pagesEng Ds Xftc300 A5Zoltán SoósNo ratings yet
- 2554458Document1 page2554458Zoltán SoósNo ratings yet
- Core Handling InstructionsDocument1 pageCore Handling InstructionsZoltán SoósNo ratings yet
- Mounting Kit Dimensional Matrix-V2Document1 pageMounting Kit Dimensional Matrix-V2Zoltán SoósNo ratings yet
- S2a SC 200 LVC 4000compchartDocument1 pageS2a SC 200 LVC 4000compchartZoltán SoósNo ratings yet
- En 21 242Document1 pageEn 21 242Zoltán SoósNo ratings yet
- All in One Vision System: ApplicationsDocument8 pagesAll in One Vision System: ApplicationsZoltán SoósNo ratings yet
- KnowledgeDocument6 pagesKnowledgeZoltán SoósNo ratings yet
- In-Line 2D: Measurement SystemDocument12 pagesIn-Line 2D: Measurement SystemZoltán SoósNo ratings yet
- Iphp 3rd-Day ReviewerDocument5 pagesIphp 3rd-Day ReviewerEufrocina NolascoNo ratings yet
- EVS MCQ 25Document4 pagesEVS MCQ 25shanesNo ratings yet
- 30MHZ AM ReceiverDocument1 page30MHZ AM ReceiverrujNo ratings yet
- Nuclear EnergyDocument6 pagesNuclear EnergyDENNIS KIHUNGINo ratings yet
- Protection Basics: Presented by John S. Levine, P.E. Levine Lectronics and Lectric, Inc. 770 565-1556Document88 pagesProtection Basics: Presented by John S. Levine, P.E. Levine Lectronics and Lectric, Inc. 770 565-1556Richard BecerraNo ratings yet
- Introduction To Tropical Meteorology Bing 1-Dikonversi PDFDocument62 pagesIntroduction To Tropical Meteorology Bing 1-Dikonversi PDFDaniel InversoNo ratings yet
- HaraprasadShastri NepalDurbarV-2 1915 TextDocument348 pagesHaraprasadShastri NepalDurbarV-2 1915 TextSIva85kami100% (1)
- Caterpillar Monitoring SystemDocument3 pagesCaterpillar Monitoring SystemFajarTaufiq100% (1)
- Microcontroller Based Heart Rate Monitor: Sharanabasappa Sali, Pooja Durge, Monika Pokar, Namrata KasgeDocument4 pagesMicrocontroller Based Heart Rate Monitor: Sharanabasappa Sali, Pooja Durge, Monika Pokar, Namrata Kasgemahavarun3096No ratings yet
- 02 05 PDFDocument177 pages02 05 PDFImagex Raios xNo ratings yet
- Otoacoustic Emissions From MedscapeDocument5 pagesOtoacoustic Emissions From MedscapeMin-Joo Esther ParkNo ratings yet
- Civil Engineering SustainabilityDocument55 pagesCivil Engineering SustainabilityEinstine Opiso100% (1)
- Perhitungan Ika Provinsi Kabupaten-KotaDocument13 pagesPerhitungan Ika Provinsi Kabupaten-Kotapuri saptaNo ratings yet
- Pregnancy and Lactation AnswersDocument8 pagesPregnancy and Lactation AnswersAoiNo ratings yet
- GRAVITY - by Hobie Thompson and Sarah HavernDocument2 pagesGRAVITY - by Hobie Thompson and Sarah HavernJohn OsborneNo ratings yet
- ISAIAH PARKER The Ones Who Walk Away From Omelas TEXTDocument5 pagesISAIAH PARKER The Ones Who Walk Away From Omelas TEXTparkerisNo ratings yet
- Terminal-Report - 10-Day FwoaDocument4 pagesTerminal-Report - 10-Day FwoaChristan John AbrenicaNo ratings yet
- Carlip-Is Quantum Gravity Necessary? (2008)Document8 pagesCarlip-Is Quantum Gravity Necessary? (2008)bhpliaoNo ratings yet
- SUMO PresentationDocument25 pagesSUMO Presentationarash_gourtaniNo ratings yet
- Ion PropulsionDocument16 pagesIon PropulsionMimsisiNo ratings yet
- B02. Junior Engineer MechanicalDocument115 pagesB02. Junior Engineer MechanicalRafay MohiuddinNo ratings yet
- Thesis Street LightingDocument8 pagesThesis Street Lightingjenniferalexanderfortlauderdale100% (1)
- War in PeaceDocument10 pagesWar in PeacePaoloViarengoNo ratings yet


































































































Download as pdf or txt
You might also like
- Nutritional Assessment 7Th Ed 7Th Edition David C Nieman Full ChapterDocument67 pagesNutritional Assessment 7Th Ed 7Th Edition David C Nieman Full Chaptercharles.martinez668100% (9)
- Problem-Oriented Medical Diagnosis 7thDocument228 pagesProblem-Oriented Medical Diagnosis 7thnhtoan3286% (7)
- IOM NetProDual Daikin Rev 4 PDFDocument15 pagesIOM NetProDual Daikin Rev 4 PDFVin Ken0% (1)
- CE Module 22 - Open Channel and Weirs (Principle)Document3 pagesCE Module 22 - Open Channel and Weirs (Principle)Angelice Alliah De la CruzNo ratings yet
- N9 and N10 With SCR (2014 - 2016) : Engine Wiring Diagram Engine Control Module (ECM)Document4 pagesN9 and N10 With SCR (2014 - 2016) : Engine Wiring Diagram Engine Control Module (ECM)Phil B.No ratings yet
- Radiography and Radiology BSAVADocument402 pagesRadiography and Radiology BSAVALaura Colorado100% (2)
- Manual Whirlpool AWSX 63213Document2 pagesManual Whirlpool AWSX 63213Marius Dedal0% (1)
- Service Training 2005Document76 pagesService Training 2005Heidi Cuevas Venegas100% (1)
- Head Loss Calculation Head Loss Calculation Using: No. DN MM M MM L/s 1/1 M M/sDocument23 pagesHead Loss Calculation Head Loss Calculation Using: No. DN MM M MM L/s 1/1 M M/sMohamedHanyNo ratings yet
- Overhaul s51 s53 s54Document29 pagesOverhaul s51 s53 s54YadiNo ratings yet
- Missal Song (Oct. 20, 2012)Document132 pagesMissal Song (Oct. 20, 2012)comeasoneNo ratings yet
- Prometheus Prometheus Texto Y Atlas de Anatomia Prometheus Textbook and Anatomy Atlas Spanish Edition by Michael SchunkeErik SchulteUdo SchumacherDocument6 pagesPrometheus Prometheus Texto Y Atlas de Anatomia Prometheus Textbook and Anatomy Atlas Spanish Edition by Michael SchunkeErik SchulteUdo SchumacherYukii Triby-a AnniimesztNo ratings yet
- Encoder HEDL 9140 500 CPT, 3 Channels, With Line Driver RS 422Document2 pagesEncoder HEDL 9140 500 CPT, 3 Channels, With Line Driver RS 422Luka MadridNo ratings yet
- Encoder HEDS 5540, 500 Counts Per Turn, 3 Channels: Order Number TypeDocument1 pageEncoder HEDS 5540, 500 Counts Per Turn, 3 Channels: Order Number TypevondutchlgNo ratings yet
- Maxon Datasheet EncoderDocument1 pageMaxon Datasheet EncoderRatanieriNo ratings yet
- Catalog Encoder MILEDocument1 pageCatalog Encoder MILELucas SuplinoNo ratings yet
- R SignDocument35 pagesR SignRichard Andrianjaka LuckyNo ratings yet
- 1 X TRIGON L Plus Boiler LLH 1CT Heating Circuit 1 DHW Circuit With A CalorifierDocument4 pages1 X TRIGON L Plus Boiler LLH 1CT Heating Circuit 1 DHW Circuit With A Calorifieradyro12No ratings yet
- Case Study - Unexpected Vibraion On A Centrifugal Compressor Caused by Vibration Probe SupportDocument23 pagesCase Study - Unexpected Vibraion On A Centrifugal Compressor Caused by Vibration Probe SupportLong Nguyen100% (1)
- FICHA TECNICA ResMED VPAP ST PDFDocument2 pagesFICHA TECNICA ResMED VPAP ST PDFfundacion para el cuidado criticoNo ratings yet
- Free Vintage Style Poster of Fundamentals of PowerDocument1 pageFree Vintage Style Poster of Fundamentals of PowerSaif HimelNo ratings yet
- Ild 22Document1 pageIld 22Felipe GarciaNo ratings yet
- Frequency Response TesterDocument7 pagesFrequency Response TesterVasileSpireaNo ratings yet
- Frequency Response TesterDocument7 pagesFrequency Response TesterVasileSpireaNo ratings yet
- Transformer With On-Load Tap-Changer: Shandong Dachi Electric Co, LTDDocument1 pageTransformer With On-Load Tap-Changer: Shandong Dachi Electric Co, LTDArjunansyah LakidendeNo ratings yet
- SPE Reelwell Drilling MethodDocument9 pagesSPE Reelwell Drilling Methodraj kumarNo ratings yet
- Ec140b 09Document6 pagesEc140b 09Fadli HernandoNo ratings yet
- MS 13 66Document2 pagesMS 13 66nurockNo ratings yet
- EBM A2E AxialFanInChillerDocument10 pagesEBM A2E AxialFanInChillerwillratNo ratings yet
- MATLABDocument1 pageMATLABbenie1No ratings yet
- Analog 2018 End SemDocument4 pagesAnalog 2018 End SemVibhinn SinghalNo ratings yet
- Half Wave Rectifier: Instruction CircuitDocument2 pagesHalf Wave Rectifier: Instruction CircuitPriyaharshini RaviNo ratings yet
- Ebm papst Noise level test standardDocument2 pagesEbm papst Noise level test standardRHETT BUTLERNo ratings yet
- EBRO HP114-C High Performance Butterfly ValveDocument4 pagesEBRO HP114-C High Performance Butterfly ValveAakash TanwarNo ratings yet
- Grafico de La Bomba de RHDocument1 pageGrafico de La Bomba de RHJherson PantojaNo ratings yet
- ZAvblueDocument166 pagesZAvblueJuan NuñezNo ratings yet
- Electro-Hydraulic I/H Converter and WSR Way ValveDocument12 pagesElectro-Hydraulic I/H Converter and WSR Way ValveNAYEEM100% (1)
- Power Factor Meter: FeaturesDocument1 pagePower Factor Meter: FeaturesMin ZayarNo ratings yet
- Timer ModulesDocument12 pagesTimer ModulesMai Thế ToanNo ratings yet
- Low Frequency Characteristic Analysis of Voltage Mode Boost ConverterDocument4 pagesLow Frequency Characteristic Analysis of Voltage Mode Boost Converterkakkunuru kashyapNo ratings yet
- Up/Down Counter Intrinsically Safe Extreme: A B C D A B C DDocument2 pagesUp/Down Counter Intrinsically Safe Extreme: A B C D A B C DIsaac FernándezNo ratings yet
- En AX10u 17uDocument2 pagesEn AX10u 17uYakupovmmNo ratings yet
- Extending SteinbergDocument35 pagesExtending SteinbergelmerocabronNo ratings yet
- Expt No: Date:: Load Test On Kaplan TurbineDocument4 pagesExpt No: Date:: Load Test On Kaplan TurbineAlex ChollackalNo ratings yet
- Almana: Schedule of Loads For Panel Board 1 (Lp-1) L.O. & C.O Schedule of Loads For Panel Board 2 (Pp1)Document4 pagesAlmana: Schedule of Loads For Panel Board 1 (Lp-1) L.O. & C.O Schedule of Loads For Panel Board 2 (Pp1)Jet ArcaNo ratings yet
- Slipway Pulley Foundation - 5 (16!05!19) (1) - ModelDocument1 pageSlipway Pulley Foundation - 5 (16!05!19) (1) - ModelA.K.M Shafiq MondolNo ratings yet
- Folleto Ham-Let Valvulas de Instrumentacion y ConectoresDocument2 pagesFolleto Ham-Let Valvulas de Instrumentacion y ConectoresRicardo Cabrera OsinagaNo ratings yet
- 4100nu 772380Document2 pages4100nu 772380Mat FraboNo ratings yet
- AMPLIFICADOR OPERACIONAL Ua741Document5 pagesAMPLIFICADOR OPERACIONAL Ua741lgotthelfNo ratings yet
- Pneumatic Conveying Solutions - Palamatic Process - Non Protege 0-23Document1 pagePneumatic Conveying Solutions - Palamatic Process - Non Protege 0-23parth sapariaNo ratings yet
- 16 TodayDocument1 page16 TodayAVD CONSTRUCTIONSNo ratings yet
- Timer - Counter - Tachometer CTADocument2 pagesTimer - Counter - Tachometer CTALeonardoMartinNo ratings yet
- 9 P P Part IV Bridge 31 To 40Document10 pages9 P P Part IV Bridge 31 To 40IdreesNo ratings yet
- Timer - Counter - Tachometer CTADocument2 pagesTimer - Counter - Tachometer CTAJaudiel CarrerasNo ratings yet
- Motion in A Plane 1 Page NotesDocument1 pageMotion in A Plane 1 Page Notessafeeurrahmanazmi104No ratings yet
- National 163q-4 Hp-165 PerformanceDocument2 pagesNational 163q-4 Hp-165 Performancejhonny barrantesNo ratings yet
- Generator Troubleshooting AdjustmentDocument13 pagesGenerator Troubleshooting AdjustmentZubair ArshadNo ratings yet
- Honeywell ModutrolIVMotor M94 Iom D1190 632195Document12 pagesHoneywell ModutrolIVMotor M94 Iom D1190 632195Jonathan Basilio GomezNo ratings yet
- E60H Series: Rotary EncoderDocument1 pageE60H Series: Rotary EncoderkopihitammorningbakeryNo ratings yet
- HEGN (Hurghada Intl)Document10 pagesHEGN (Hurghada Intl)Seyi WilliamsNo ratings yet
- 02 Grav Exe Gro Fe R+1 BS 311 0B PDFDocument1 page02 Grav Exe Gro Fe R+1 BS 311 0B PDFNguyen Khac DatNo ratings yet
- Drawing For 8kw Duct Heater (1.5kwx4,1kwx2)Document9 pagesDrawing For 8kw Duct Heater (1.5kwx4,1kwx2)Balamurugan ArumugamNo ratings yet
- 2-Viscous Flow in Pipe Energy SystemsDocument6 pages2-Viscous Flow in Pipe Energy SystemsDN CoverNo ratings yet
- Vacuum Pumps For Table Top Steam Autoclaves: Application BrochureDocument8 pagesVacuum Pumps For Table Top Steam Autoclaves: Application Brochurenotaden1849No ratings yet
- TV and CRT Display Vertical Output IC With Bus Control SupportDocument4 pagesTV and CRT Display Vertical Output IC With Bus Control SupportLuis RinconNo ratings yet
- Data Sheet enDocument2 pagesData Sheet enZoltán SoósNo ratings yet
- Eng DS R36as A4Document3 pagesEng DS R36as A4Zoltán SoósNo ratings yet
- Eng Ds Xftc310 A4Document4 pagesEng Ds Xftc310 A4Zoltán SoósNo ratings yet
- Eng Ds Xftc300 A5Document4 pagesEng Ds Xftc300 A5Zoltán SoósNo ratings yet
- 2554458Document1 page2554458Zoltán SoósNo ratings yet
- Core Handling InstructionsDocument1 pageCore Handling InstructionsZoltán SoósNo ratings yet
- Mounting Kit Dimensional Matrix-V2Document1 pageMounting Kit Dimensional Matrix-V2Zoltán SoósNo ratings yet
- S2a SC 200 LVC 4000compchartDocument1 pageS2a SC 200 LVC 4000compchartZoltán SoósNo ratings yet
- En 21 242Document1 pageEn 21 242Zoltán SoósNo ratings yet
- All in One Vision System: ApplicationsDocument8 pagesAll in One Vision System: ApplicationsZoltán SoósNo ratings yet
- KnowledgeDocument6 pagesKnowledgeZoltán SoósNo ratings yet
- In-Line 2D: Measurement SystemDocument12 pagesIn-Line 2D: Measurement SystemZoltán SoósNo ratings yet
- Iphp 3rd-Day ReviewerDocument5 pagesIphp 3rd-Day ReviewerEufrocina NolascoNo ratings yet
- EVS MCQ 25Document4 pagesEVS MCQ 25shanesNo ratings yet
- 30MHZ AM ReceiverDocument1 page30MHZ AM ReceiverrujNo ratings yet
- Nuclear EnergyDocument6 pagesNuclear EnergyDENNIS KIHUNGINo ratings yet
- Protection Basics: Presented by John S. Levine, P.E. Levine Lectronics and Lectric, Inc. 770 565-1556Document88 pagesProtection Basics: Presented by John S. Levine, P.E. Levine Lectronics and Lectric, Inc. 770 565-1556Richard BecerraNo ratings yet
- Introduction To Tropical Meteorology Bing 1-Dikonversi PDFDocument62 pagesIntroduction To Tropical Meteorology Bing 1-Dikonversi PDFDaniel InversoNo ratings yet
- HaraprasadShastri NepalDurbarV-2 1915 TextDocument348 pagesHaraprasadShastri NepalDurbarV-2 1915 TextSIva85kami100% (1)
- Caterpillar Monitoring SystemDocument3 pagesCaterpillar Monitoring SystemFajarTaufiq100% (1)
- Microcontroller Based Heart Rate Monitor: Sharanabasappa Sali, Pooja Durge, Monika Pokar, Namrata KasgeDocument4 pagesMicrocontroller Based Heart Rate Monitor: Sharanabasappa Sali, Pooja Durge, Monika Pokar, Namrata Kasgemahavarun3096No ratings yet
- 02 05 PDFDocument177 pages02 05 PDFImagex Raios xNo ratings yet
- Otoacoustic Emissions From MedscapeDocument5 pagesOtoacoustic Emissions From MedscapeMin-Joo Esther ParkNo ratings yet
- Civil Engineering SustainabilityDocument55 pagesCivil Engineering SustainabilityEinstine Opiso100% (1)
- Perhitungan Ika Provinsi Kabupaten-KotaDocument13 pagesPerhitungan Ika Provinsi Kabupaten-Kotapuri saptaNo ratings yet
- Pregnancy and Lactation AnswersDocument8 pagesPregnancy and Lactation AnswersAoiNo ratings yet
- GRAVITY - by Hobie Thompson and Sarah HavernDocument2 pagesGRAVITY - by Hobie Thompson and Sarah HavernJohn OsborneNo ratings yet
- ISAIAH PARKER The Ones Who Walk Away From Omelas TEXTDocument5 pagesISAIAH PARKER The Ones Who Walk Away From Omelas TEXTparkerisNo ratings yet
- Terminal-Report - 10-Day FwoaDocument4 pagesTerminal-Report - 10-Day FwoaChristan John AbrenicaNo ratings yet
- Carlip-Is Quantum Gravity Necessary? (2008)Document8 pagesCarlip-Is Quantum Gravity Necessary? (2008)bhpliaoNo ratings yet
- SUMO PresentationDocument25 pagesSUMO Presentationarash_gourtaniNo ratings yet
- Ion PropulsionDocument16 pagesIon PropulsionMimsisiNo ratings yet
- B02. Junior Engineer MechanicalDocument115 pagesB02. Junior Engineer MechanicalRafay MohiuddinNo ratings yet
- Thesis Street LightingDocument8 pagesThesis Street Lightingjenniferalexanderfortlauderdale100% (1)
- War in PeaceDocument10 pagesWar in PeacePaoloViarengoNo ratings yet