Download as pdf or txt
You might also like
- HLD SampleDocument34 pagesHLD SampleManoj Kumar100% (3)
- A Prospective Study On Algorithms Adapted To The Spatial Frequency in TomographyDocument6 pagesA Prospective Study On Algorithms Adapted To The Spatial Frequency in TomographySChouetNo ratings yet
- Sukhanlee 1984Document13 pagesSukhanlee 1984luis camilo montaño gomezNo ratings yet
- Effects of Particle Swarm Optimization Algorithm Parameters For Structural Dynamic Monitoring of Cantilever BeamDocument7 pagesEffects of Particle Swarm Optimization Algorithm Parameters For Structural Dynamic Monitoring of Cantilever BeamFia PutriNo ratings yet
- An ANFIS Based Fuzzy Synthesis Judgment For Transformer Fault DiagnosisDocument10 pagesAn ANFIS Based Fuzzy Synthesis Judgment For Transformer Fault DiagnosisDanh Bui CongNo ratings yet
- Stiffness and Damage Identification With Model Reduction TechniqueDocument8 pagesStiffness and Damage Identification With Model Reduction Techniquegorot1No ratings yet
- Implementing Motion Markov Detection On General Purpose Processor and Associative MeshDocument6 pagesImplementing Motion Markov Detection On General Purpose Processor and Associative MeshTuan NguyenNo ratings yet
- A Regression Technique With Dynamic Parameter Selection For Phase-Behavior MatchingDocument6 pagesA Regression Technique With Dynamic Parameter Selection For Phase-Behavior MatchingMohamed ElkumatiNo ratings yet
- EM Based Medical Image SegmentaitonDocument4 pagesEM Based Medical Image SegmentaitonMohAnVinNo ratings yet
- Applying Kalman Filtering in Solving SSM Estimation Problem by The Means of EM Algorithm With Considering A Practical ExampleDocument8 pagesApplying Kalman Filtering in Solving SSM Estimation Problem by The Means of EM Algorithm With Considering A Practical ExampleJournal of ComputingNo ratings yet
- Ledig 2012Document4 pagesLedig 2012Naufal IlmiNo ratings yet
- Models: Mixture Optical ComputationDocument2 pagesModels: Mixture Optical Computationsig njgNo ratings yet
- Gray Box 1994Document10 pagesGray Box 1994Mario CalderonNo ratings yet
- An Inter-Comparison of Three Spectral-DeconvolutioDocument9 pagesAn Inter-Comparison of Three Spectral-DeconvolutiojaloaliniskiNo ratings yet
- 1989 - A Novel Approach To Dynamic Load ModellingDocument7 pages1989 - A Novel Approach To Dynamic Load ModellingArindam MitraNo ratings yet
- Techniques For Feature Extraction From EMG SignalDocument4 pagesTechniques For Feature Extraction From EMG Signaleditor_ijarcsseNo ratings yet
- Computational Inversion of Electron TomoDocument30 pagesComputational Inversion of Electron TomoHenrikas KurylaNo ratings yet
- MUSCLE: Multiple Sequence Alignment With High Accuracy and High ThroughputDocument6 pagesMUSCLE: Multiple Sequence Alignment With High Accuracy and High ThroughputCristian Saldaña CabreraNo ratings yet
- s14 CompletareDocument14 pagess14 CompletareLaura NicoletaNo ratings yet
- Multichannel Electrocardiogram Decomposition Using Periodic Component AnalysisDocument6 pagesMultichannel Electrocardiogram Decomposition Using Periodic Component AnalysisRuiqi GuoNo ratings yet
- Evans1950 PDFDocument4 pagesEvans1950 PDFRoyer Guerra huamanNo ratings yet
- Ic3s1308 PDFDocument4 pagesIc3s1308 PDFBinduNo ratings yet
- Lattice-Based Minimum Error Rate Training Using Weighted Finite-State Transducers With Tropical Polynomial WeightsDocument10 pagesLattice-Based Minimum Error Rate Training Using Weighted Finite-State Transducers With Tropical Polynomial WeightsHuWalterNo ratings yet
- A Simplified Method For Parameter Estimating of Double Exponential PulseDocument3 pagesA Simplified Method For Parameter Estimating of Double Exponential Pulse임광식No ratings yet
- Modeling Excitable Cells With The EMI Equations: Spectral Analysis and Iterative Solution StrategyDocument27 pagesModeling Excitable Cells With The EMI Equations: Spectral Analysis and Iterative Solution StrategyAlexNo ratings yet
- IMM Iterated Extended Particle Filter AlgorithmDocument9 pagesIMM Iterated Extended Particle Filter AlgorithmnidiamidoriNo ratings yet
- Terebilo 1997 0182Document3 pagesTerebilo 1997 0182Particle Beam Physics LabNo ratings yet
- Physics-Informed Echo State Networks For Chaotic Systems ForecastingDocument7 pagesPhysics-Informed Echo State Networks For Chaotic Systems Forecastingjulio.dutraNo ratings yet
- Neural Networks For Control - 01Document5 pagesNeural Networks For Control - 01Lissete VergaraNo ratings yet
- LMS Algorithm For Optimizing The Phased Array Antenna Radiation PatternDocument5 pagesLMS Algorithm For Optimizing The Phased Array Antenna Radiation PatternJournal of TelecommunicationsNo ratings yet
- Fast Curvature Matrix-Vector Products For Second-Order Gradient DescentDocument16 pagesFast Curvature Matrix-Vector Products For Second-Order Gradient DescentKitanovic NenadNo ratings yet
- Ref4-Some Elements of Operational Modal Analysis PDFDocument12 pagesRef4-Some Elements of Operational Modal Analysis PDFBelaliaNo ratings yet
- Decoupling Strategy of Multi-Dimensional Force Sensor Based On LS-SVM and Th-Order Inverse System MethodDocument4 pagesDecoupling Strategy of Multi-Dimensional Force Sensor Based On LS-SVM and Th-Order Inverse System MethodoksejenNo ratings yet
- Application of Artificial Neural Networks in Power System Security and Vulnerability Assessment Qin A. A. Fouad 525Document8 pagesApplication of Artificial Neural Networks in Power System Security and Vulnerability Assessment Qin A. A. Fouad 525venkatesh1987No ratings yet
- Denoising of Natural Images Based On Compressive Sensing: Chege SimonDocument16 pagesDenoising of Natural Images Based On Compressive Sensing: Chege SimonIAEME PublicationNo ratings yet
- Prony PaperDocument10 pagesProny PaperAnkit BhattNo ratings yet
- RBF BP JieeecDocument5 pagesRBF BP JieeecEyad A. FeilatNo ratings yet
- Advances in Particle Swarm Optimization For Antenna Designs: Real-Number, Binary, Single-Objective and Multiobjective ImplementationsDocument12 pagesAdvances in Particle Swarm Optimization For Antenna Designs: Real-Number, Binary, Single-Objective and Multiobjective ImplementationsAhm DHNo ratings yet
- Dynamic Response and Flutter Prediction of Structures With Unknown System Parameters Using Experimental Modal ParametersDocument17 pagesDynamic Response and Flutter Prediction of Structures With Unknown System Parameters Using Experimental Modal ParametersiisteNo ratings yet
- Evaluation of Tomographic Brain Reconstruction Techniques: Case of The Shepp-Logan PhantomDocument5 pagesEvaluation of Tomographic Brain Reconstruction Techniques: Case of The Shepp-Logan PhantomEmmanuel TonyeNo ratings yet
- Towards Faster Givens Rotations Based Power System State EstimatorDocument7 pagesTowards Faster Givens Rotations Based Power System State EstimatorPraveen Nayak BhukyaNo ratings yet
- EOF JCepeda2014Document6 pagesEOF JCepeda2014Jaime CepedaNo ratings yet
- w02 NeuralNetworks PDFDocument5 pagesw02 NeuralNetworks PDFMedi Hermanto TinambunanNo ratings yet
- Fast Approximation of The Norm Via Optimization Over Spectral Value SetsDocument29 pagesFast Approximation of The Norm Via Optimization Over Spectral Value SetsarviandyNo ratings yet
- Comparison Two Methods Estimating The Intensity of A Noisy Complex ProcessDocument6 pagesComparison Two Methods Estimating The Intensity of A Noisy Complex ProcessPaulo H TavaresNo ratings yet
- Kohonen 82Document11 pagesKohonen 82Thoi Ke No DiNo ratings yet
- Visapp2013 PDFDocument6 pagesVisapp2013 PDFDana FloresNo ratings yet
- Brain-Machine Interfaces: Matlab ExercisesDocument2 pagesBrain-Machine Interfaces: Matlab ExercisesboucharebNo ratings yet
- Xspec: Spectral Fitting and XSPECDocument3 pagesXspec: Spectral Fitting and XSPECsanjit debnathNo ratings yet
- Chang 2004Document11 pagesChang 2004Allan FontesNo ratings yet
- Choice of Line Spread Function Sampling Distance For Computing The MTF of Radiographic Screen Film SystemsDocument11 pagesChoice of Line Spread Function Sampling Distance For Computing The MTF of Radiographic Screen Film SystemsLuiz MelkNo ratings yet
- Histogram Methods in Monte Carlo Simulations: BelliappaDocument61 pagesHistogram Methods in Monte Carlo Simulations: BelliappabelibeeNo ratings yet
- Structural Response Characteristics in Consideration of Directional Uncertainty of Earthquake Ground MotionDocument10 pagesStructural Response Characteristics in Consideration of Directional Uncertainty of Earthquake Ground MotionSakisNo ratings yet
- Expectation-Maximization Technique and Spatial - Adaptation Applied To Pel-Recursive Motion Estimation Sci2004Document6 pagesExpectation-Maximization Technique and Spatial - Adaptation Applied To Pel-Recursive Motion Estimation Sci2004ShadowNo ratings yet
- An Anisotropic Diffusion Regularized Demons For Improved Registration of Sliding OrgansDocument4 pagesAn Anisotropic Diffusion Regularized Demons For Improved Registration of Sliding OrgansIzudin SoftićNo ratings yet
- How To Decide The Best Fuzzy Model in ANFISDocument7 pagesHow To Decide The Best Fuzzy Model in ANFISIjmret JournalNo ratings yet
- Robust Uncertainty Principles: Exact Signal Reconstruction From Highly Incomplete Frequency InformationDocument21 pagesRobust Uncertainty Principles: Exact Signal Reconstruction From Highly Incomplete Frequency InformationGilbertNo ratings yet
- Journal of Electromagnetic Analysis and ApplicationsDocument7 pagesJournal of Electromagnetic Analysis and Applicationskrishnagaurav90No ratings yet
- Harnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingFrom EverandHarnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingNo ratings yet
- Spline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsFrom EverandSpline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsNo ratings yet
- Chang 2004Document11 pagesChang 2004Allan FontesNo ratings yet
- Rivers 2012Document13 pagesRivers 2012Allan FontesNo ratings yet
- Kak&Slaney CTI ReducedDocument332 pagesKak&Slaney CTI ReducedAllan FontesNo ratings yet
- Dowd 1999Document13 pagesDowd 1999Allan FontesNo ratings yet
- Balanced Pressure SystemsDocument5 pagesBalanced Pressure SystemsIoana PopescuNo ratings yet
- AT Series Gear Box BroctureDocument2 pagesAT Series Gear Box BroctureabhinitindiaNo ratings yet
- Key Roles and Responsibilities in The Implementation of The PNP P.A.T.R.O.L. PLAN 2030Document45 pagesKey Roles and Responsibilities in The Implementation of The PNP P.A.T.R.O.L. PLAN 2030Marlon Quimno50% (2)
- Chapter 4 - Update Operations, Update Anomalies, and NormalizationDocument59 pagesChapter 4 - Update Operations, Update Anomalies, and NormalizationMarah IrshedatNo ratings yet
- ReleaseNotes GFX 15 36 21 4222Document6 pagesReleaseNotes GFX 15 36 21 4222Rawad SalemNo ratings yet
- Data Classification Approaches Applied To Dga For Fault Diagnosis in Oil-Filled Power TransformersDocument7 pagesData Classification Approaches Applied To Dga For Fault Diagnosis in Oil-Filled Power TransformersIkhwanBelajarSunnahNo ratings yet
- BssDocument3 pagesBssaaaNo ratings yet
- Operational Plan TemplateDocument5 pagesOperational Plan TemplateREMULAR, KC Isabel R.No ratings yet
- The Wonderful World of Chrome Extensions Volume 27Document14 pagesThe Wonderful World of Chrome Extensions Volume 27rajat mehrotraNo ratings yet
- Kamiq - Electrical System - General NotesDocument96 pagesKamiq - Electrical System - General NoteshendyNo ratings yet
- DBB-27 Technical ManualDocument140 pagesDBB-27 Technical Manualtinep0493No ratings yet
- Tank SluiceDocument3 pagesTank SluiceThippeswamy PhNo ratings yet
- LG340N1C-A5 LG335N1C-A5 LG330N1C-A5: FeatureDocument2 pagesLG340N1C-A5 LG335N1C-A5 LG330N1C-A5: FeaturereneNo ratings yet
- Silk Test Interview Questions and AnswersDocument2 pagesSilk Test Interview Questions and AnswersatoztargetNo ratings yet
- Assignment 1 Building ServicesDocument3 pagesAssignment 1 Building ServicesAnis KhalilahNo ratings yet
- Dwnload Full Operations Management Operations and Supply Chain Management 14th Edition Jacobs Solutions Manual PDFDocument35 pagesDwnload Full Operations Management Operations and Supply Chain Management 14th Edition Jacobs Solutions Manual PDFtotallystance4z36h100% (14)
- Cse3001 Software Engineering: Dr. S M SatapathyDocument42 pagesCse3001 Software Engineering: Dr. S M SatapathySteve 11No ratings yet
- p2 October 2021 PaperDocument32 pagesp2 October 2021 PaperMd Shahidul Islam IslamNo ratings yet
- Ai ChatbotDocument5 pagesAi ChatbotUdaykiran KakumaniNo ratings yet
- CMU-SE 214 Requirements Engineering - 2022S - Lecture Slides-7Document47 pagesCMU-SE 214 Requirements Engineering - 2022S - Lecture Slides-7Tống Phước HuyNo ratings yet
- Unifet: Fda70N20Document8 pagesUnifet: Fda70N20Muhammad SalahuddinNo ratings yet
- Pemanfaatan Panas Panci Yang Terbuang Sebagai Sumber Energi Listrik Alternatif Berbasis Termoelektrik Generator (Teg)Document8 pagesPemanfaatan Panas Panci Yang Terbuang Sebagai Sumber Energi Listrik Alternatif Berbasis Termoelektrik Generator (Teg)herdi sutanto adigunaNo ratings yet
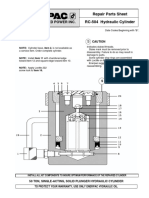
- Manuel de Partes y Reparacion Cilindro RC 504Document2 pagesManuel de Partes y Reparacion Cilindro RC 504Mauricio Hermosilla OrellanaNo ratings yet
- Bahasa Inggris Paket ADocument43 pagesBahasa Inggris Paket AEwalde Nai ButiNo ratings yet
- Project Phase I - ReportDocument62 pagesProject Phase I - ReportAswini NRNo ratings yet
- Fyp ThesisDocument51 pagesFyp ThesisAmna Latif100% (1)
- Curriculum of Competency Unit (Cocu)Document9 pagesCurriculum of Competency Unit (Cocu)wan fahiraNo ratings yet
- Design and Simulation of A Rooftop Solar PV System Using PVsyst SoftwareDocument5 pagesDesign and Simulation of A Rooftop Solar PV System Using PVsyst Softwarefatemeh mohammadiNo ratings yet