Download as pdf or txt
You might also like
- IRH ProjectDocument19 pagesIRH ProjectIvan Sanchez100% (2)
- Mathematics - Further Mathematics HL - Linear Algebra and Geometry - First EditionDocument352 pagesMathematics - Further Mathematics HL - Linear Algebra and Geometry - First EditionReshmaNo ratings yet
- MAT1801 - Maths For Engineers 1 - Kenneth ZerafaDocument162 pagesMAT1801 - Maths For Engineers 1 - Kenneth Zerafakennethz3No ratings yet
- 01 PID CompensationDocument49 pages01 PID CompensationShadowツNo ratings yet
- Simple Annuity FormulaDocument2 pagesSimple Annuity FormulaTimbas, Raizel DeeNo ratings yet
- Resonancia Circuitos RLCDocument9 pagesResonancia Circuitos RLCEddyNo ratings yet
- Analysis of Transients in The Circuit 3Document5 pagesAnalysis of Transients in The Circuit 3Lil bro tamiNo ratings yet
- Shunt Voltage RegulatorDocument4 pagesShunt Voltage RegulatorSamuel mutindaNo ratings yet
- DR Lara Abou Orm Calculus III Hyperbolic Functions, Inverse Trigonometric Functions, SeriesDocument4 pagesDR Lara Abou Orm Calculus III Hyperbolic Functions, Inverse Trigonometric Functions, SeriesIsmael hijaziNo ratings yet
- Free Convection PDFDocument9 pagesFree Convection PDFaditya a pNo ratings yet
- Lecture 6 Notes - Advanced Arch Dams Part 2Document10 pagesLecture 6 Notes - Advanced Arch Dams Part 2Chalang AkramNo ratings yet
- Block DiagramDocument14 pagesBlock DiagramPrince WyneNo ratings yet
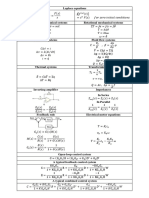
- Final Formula SheetDocument4 pagesFinal Formula SheetBerkay EkenNo ratings yet
- EjemploDocument5 pagesEjemploAngel Martinez NavaNo ratings yet
- Control Systems 2: Lecture 4 - Quantitative Feedback Theory (QFT) Disturbance RejectionDocument16 pagesControl Systems 2: Lecture 4 - Quantitative Feedback Theory (QFT) Disturbance RejectionLEBONo ratings yet
- Formulario Undad 3Document5 pagesFormulario Undad 3SERGIO FALCON CASIANONo ratings yet
- PruebaDocument6 pagesPruebamaquina1No ratings yet
- Grade 12 Mathematics: Advanced StreamDocument28 pagesGrade 12 Mathematics: Advanced Streammanal alsaadiNo ratings yet
- VPÜ Képlet - 2023 - 2024 - 1Document1 pageVPÜ Képlet - 2023 - 2024 - 1szilagyinorbert22No ratings yet
- Experiment 3Document12 pagesExperiment 3Sayaf KhanNo ratings yet
- Inverse Laplace Transform ModuleDocument18 pagesInverse Laplace Transform ModuleAditya SinghNo ratings yet
- Deduciion GibbsDocument3 pagesDeduciion GibbsKaren Gabriela RoldánNo ratings yet
- 4-Modeling in The Frequency Domain PDFDocument28 pages4-Modeling in The Frequency Domain PDFMüge ERDOĞANNo ratings yet
- CalculusDocument16 pagesCalculusapi-662361166No ratings yet
- Ex 2 Two Hinge ArchDocument3 pagesEx 2 Two Hinge ArchchandrasekarNo ratings yet
- Tipo de Resalto en Base A F3Document2 pagesTipo de Resalto en Base A F3MarinaNo ratings yet
- 3trigonometric FormulaeDocument2 pages3trigonometric FormulaeMahek IrfanNo ratings yet
- 10 Higuera Corrosion y TransporteDocument49 pages10 Higuera Corrosion y TransporteEduardo SorcererNo ratings yet
- Steady State ErrorDocument4 pagesSteady State ErrorAhmed KhaledNo ratings yet
- 7 IntegrationDocument7 pages7 Integrationأيوب عبد الأمير هزبر /تقنية غازNo ratings yet
- قواعد التكامل PDFDocument4 pagesقواعد التكامل PDFريانNo ratings yet
- FormulaDocument5 pagesFormulaRosebie Dlsrys IINo ratings yet
- Bab. IntegralDocument9 pagesBab. IntegralArkan AufaNo ratings yet
- Shear Stresses: Mass Conservation Equation in Cartesian CoordinatesDocument2 pagesShear Stresses: Mass Conservation Equation in Cartesian Coordinatesمحمد عمادNo ratings yet
- HW 7Document5 pagesHW 7anonymoussionNo ratings yet
- Laplace PPTDocument172 pagesLaplace PPTRama ThombareNo ratings yet
- Cosas de CocinaDocument2 pagesCosas de CocinaAlvaro PradesNo ratings yet
- EE435 - Chapter5 - Lec1 - Transient Response Analysis - Part A - A.HaddadDocument20 pagesEE435 - Chapter5 - Lec1 - Transient Response Analysis - Part A - A.HaddadIbrahim abdoNo ratings yet
- Taller 6Document9 pagesTaller 6Stiven Orjuela GomezNo ratings yet
- Formulae Sheet For Structural Engineering End Term Paper Concrete Stresses in FlexuralDocument1 pageFormulae Sheet For Structural Engineering End Term Paper Concrete Stresses in FlexuralHAFIZ ARSALAN ALINo ratings yet
- Prestress Concrete: University of Thi-Qar Civil Engineering DepartementDocument13 pagesPrestress Concrete: University of Thi-Qar Civil Engineering DepartementMalak ShatiNo ratings yet
- Fuente: Malmivuo, Jaakko Plonsey, Robert Bioelectromagnetism, Principles and Applications of Bioelectric andDocument1 pageFuente: Malmivuo, Jaakko Plonsey, Robert Bioelectromagnetism, Principles and Applications of Bioelectric andJuan David CastañoNo ratings yet
- Problema Charles Holt 15Document7 pagesProblema Charles Holt 15api-306770746No ratings yet
- TM CM L11 4 PDFDocument1 pageTM CM L11 4 PDFsayandatta1No ratings yet
- Vector AnalysisDocument2 pagesVector AnalysismylimbofriendNo ratings yet
- First Order Circuits - RC and RLDocument22 pagesFirst Order Circuits - RC and RLTyspoNo ratings yet
- Clase 12 - Mate III - Integrales Curvilíneas 4Document12 pagesClase 12 - Mate III - Integrales Curvilíneas 4ND ALEXANDRANo ratings yet
- Laporan Praktikum Pengendalian Dan Instrumentasi ProsesDocument5 pagesLaporan Praktikum Pengendalian Dan Instrumentasi ProsesDeborah Basa LumbanrajaNo ratings yet
- Equation SheetDocument10 pagesEquation SheetNorris wongNo ratings yet
- RMM Calculus Marathon 1501 1600 CompressedDocument152 pagesRMM Calculus Marathon 1501 1600 CompressedsyedshahabudeenNo ratings yet
- Formulario PDFDocument1 pageFormulario PDFCristina Huañapaco GutierrezNo ratings yet
- 1phase-Half Wave Uncontrolled Rectifier: RL - Load: R-Load With Capacitor FilterDocument1 page1phase-Half Wave Uncontrolled Rectifier: RL - Load: R-Load With Capacitor FilterAhmad Ash SharkawiNo ratings yet
- All FormulaDocument7 pagesAll FormulaLeeshNo ratings yet
- Correc Exe1Document1 pageCorrec Exe1SOUFIANE BOURCHIHNo ratings yet
- Rate Limiting StepDocument4 pagesRate Limiting Stepanak tengikNo ratings yet
- Distillation CSTR RaviDocument6 pagesDistillation CSTR RaviMovie 4UNo ratings yet
- ElectronicsDocument57 pagesElectronicsYashodha SNo ratings yet
- Sheet (2) (Laplace Transform)Document3 pagesSheet (2) (Laplace Transform)mostafa nasserNo ratings yet
- Sesiones 27-28:: Análisis Vectorial y Tensorial Aplicado A La FísicaDocument22 pagesSesiones 27-28:: Análisis Vectorial y Tensorial Aplicado A La FísicaLev LandauNo ratings yet
- Modified Formula SheetDocument6 pagesModified Formula SheetoybzvapNo ratings yet
- 01 Time Response Analysis V1Document47 pages01 Time Response Analysis V1ShadowツNo ratings yet
- 01 - Signal Flow GraphDocument31 pages01 - Signal Flow GraphShadowツNo ratings yet
- Unit 1 - Part 1 - MSK SirDocument56 pagesUnit 1 - Part 1 - MSK SirShadowツNo ratings yet
- 01 PID CompensationDocument49 pages01 PID CompensationShadowツNo ratings yet
- Unit 1 - Part 2 - MSK SirDocument56 pagesUnit 1 - Part 2 - MSK SirShadowツNo ratings yet
- My Notes - Z TransformsDocument49 pagesMy Notes - Z TransformsShadowツNo ratings yet
- DTSS - Z TransformsDocument138 pagesDTSS - Z TransformsShadowツNo ratings yet
- Dcs 1Document74 pagesDcs 1ShadowツNo ratings yet
- 3c) Question Paper (Mid Exam)Document2 pages3c) Question Paper (Mid Exam)venkiscribd444No ratings yet
- BSC StatisticsDocument141 pagesBSC StatisticsMurali Krishnan SelvarajaNo ratings yet
- CHOO, Yan Min - H2 Mathematics PDFDocument1,384 pagesCHOO, Yan Min - H2 Mathematics PDFRaymond ChinNo ratings yet
- Chapter 4 Demand EstimationDocument8 pagesChapter 4 Demand Estimationmyra0% (1)
- Green Assessment 03Document12 pagesGreen Assessment 03WK CNo ratings yet
- Kumnamu Elementary School Jl. Palem Raja 3 No. 6 Karawaci Tangerang Mid-Term 1 Semester-Academic Year 2018/2019Document3 pagesKumnamu Elementary School Jl. Palem Raja 3 No. 6 Karawaci Tangerang Mid-Term 1 Semester-Academic Year 2018/2019ruth marpaungNo ratings yet
- Summative Test No. 1 in Mathematics 6 (First Quarter)Document2 pagesSummative Test No. 1 in Mathematics 6 (First Quarter)Allan CasacopNo ratings yet
- Casio Manual fx-9860GII - Soft - EN PDFDocument473 pagesCasio Manual fx-9860GII - Soft - EN PDFglazetmNo ratings yet
- Joint Moment Generating Function of R.V.'S and Equality in DistributionDocument15 pagesJoint Moment Generating Function of R.V.'S and Equality in Distributionpankaj kumarNo ratings yet
- A Brief Overview of The Regime Shift Detection Methods: Sergei RodionovDocument28 pagesA Brief Overview of The Regime Shift Detection Methods: Sergei RodionovDaniela MerchanNo ratings yet
- Econometrics Written by HansenDocument238 pagesEconometrics Written by Hansenqianying86100% (1)
- Order of Operations - Daily Lesson PlansDocument11 pagesOrder of Operations - Daily Lesson Plansapi-256952815100% (1)
- Chapitre 4Document80 pagesChapitre 4Chaima BelhediNo ratings yet
- General Relativity: Matthias Bartelmann Institut F Ur Theoretische Astrophysik Universit at HeidelbergDocument196 pagesGeneral Relativity: Matthias Bartelmann Institut F Ur Theoretische Astrophysik Universit at HeidelbergparonimusNo ratings yet
- GATE - CSE Made Easy 342 392Document51 pagesGATE - CSE Made Easy 342 392Stuti Gupta100% (1)
- Faculty of Economics and Business Universiti Malaysia Sarawak 94300 Kota Samarahan, Sarawak Ebq2024 Statistics For Economics and Business Tutorial 4Document4 pagesFaculty of Economics and Business Universiti Malaysia Sarawak 94300 Kota Samarahan, Sarawak Ebq2024 Statistics For Economics and Business Tutorial 4Li YuNo ratings yet
- Ejercicios Resueltos - Introducción A La Geometría AnalíticaDocument7 pagesEjercicios Resueltos - Introducción A La Geometría AnalíticaJesús Moreno Plasencia0% (1)
- 2001 Tut02Document2 pages2001 Tut02Allien WangNo ratings yet
- MECH6091 - Poject1.Flight Control Systems - Qball Quadrotor HelicopterDocument28 pagesMECH6091 - Poject1.Flight Control Systems - Qball Quadrotor HelicopterOmar MalikNo ratings yet
- The Einstein Summation Notation (Barr)Document25 pagesThe Einstein Summation Notation (Barr)frege6534No ratings yet
- 3 ADocument43 pages3 AAk KumarNo ratings yet
- Joke Meheus Ed. Inconsistency in Science 2002 PDFDocument225 pagesJoke Meheus Ed. Inconsistency in Science 2002 PDFBárbara OliveiraNo ratings yet
- Algebra 1-Study Guide Test 14Document4 pagesAlgebra 1-Study Guide Test 14Matthew WengNo ratings yet
- 01 Balana - MergedDocument15 pages01 Balana - Mergedjaren.marcelinoNo ratings yet
- Imaging With Four Spherical Mirrors - StoneDocument11 pagesImaging With Four Spherical Mirrors - Stoneutente489133No ratings yet
- Revision WorksheetDocument8 pagesRevision Worksheetjanvi mehtaNo ratings yet
- Icse Semester 1 Examination Specimen Question Paper MathematicsDocument5 pagesIcse Semester 1 Examination Specimen Question Paper MathematicsAnsh SharmaNo ratings yet
- Aqc ElkDocument42 pagesAqc ElkmateoscoNo ratings yet