Download as pdf or txt
You might also like
- Report Standart TraverseDocument25 pagesReport Standart TraverseAmirul Yaakub57% (7)
- Gps Positioning and SurveyingDocument62 pagesGps Positioning and Surveyinglisahun100% (1)
- At Pop RecordDocument84 pagesAt Pop Recordedward77100% (3)
- Group 4-Geodesy (Final) PDFDocument18 pagesGroup 4-Geodesy (Final) PDFQueci NaksNo ratings yet
- Tarea 3 Topografia.Document5 pagesTarea 3 Topografia.alejandra camposNo ratings yet
- DGPS Report of Changunarayan and LaphipheidiDocument10 pagesDGPS Report of Changunarayan and LaphipheidislashNo ratings yet
- Chapter 1B The Displacement of Boundary MarksDocument33 pagesChapter 1B The Displacement of Boundary MarksNaqibDarwishNo ratings yet
- Field Practise: Use of A Garmin Gps 12 Receiver: 1. Introduction: ObjectDocument3 pagesField Practise: Use of A Garmin Gps 12 Receiver: 1. Introduction: ObjectPedro Luis CarroNo ratings yet
- Cadastral Surveying IIDocument16 pagesCadastral Surveying IISafwan Izzaty67% (12)
- Projection and Transformation CalculationsDocument38 pagesProjection and Transformation CalculationsArun NesamNo ratings yet
- Daily Report - 2Document15 pagesDaily Report - 2Shahid Niaz Apu 200051258No ratings yet
- Projection and Transformation CalculationsDocument38 pagesProjection and Transformation Calculationssrinis4777-1No ratings yet
- Projection and Transformation CalculationsDocument38 pagesProjection and Transformation CalculationsMichael MatshonaNo ratings yet
- Correction of Sensor Alignment of Adeos-Ii/GliDocument5 pagesCorrection of Sensor Alignment of Adeos-Ii/GliKobalt von KriegerischbergNo ratings yet
- Topography - Draft - 20221221Document13 pagesTopography - Draft - 20221221needmorebooksNo ratings yet
- GCP Survey ReportDocument8 pagesGCP Survey ReportImam Satria Yudha100% (1)
- Paper 25Document5 pagesPaper 25Khang LêNo ratings yet
- Handout 1 PDFDocument19 pagesHandout 1 PDFbrainkzNo ratings yet
- Proximity Analysis ...Document5 pagesProximity Analysis ...Tudor BorsanNo ratings yet
- Abstract GpsDocument7 pagesAbstract Gpspappa20No ratings yet
- Assignment Submission FormDocument8 pagesAssignment Submission Form99210041134No ratings yet
- REPORTDocument33 pagesREPORTMuhammad Zahid Zakwan Muhammad TakiyudinNo ratings yet
- gss150 ReportDocument6 pagesgss150 ReportFatihah AswaniNo ratings yet
- DGPS Enhancement To GPS NMEA Output Data DGPS by CDocument17 pagesDGPS Enhancement To GPS NMEA Output Data DGPS by CLucas BarriosNo ratings yet
- Items of Cadastral Computations in The Pblis of KCSC: Prof. Byung-Guk KIM, Kwang-Seok KWON and Donghoon JEONG, KoreaDocument11 pagesItems of Cadastral Computations in The Pblis of KCSC: Prof. Byung-Guk KIM, Kwang-Seok KWON and Donghoon JEONG, KoreaAlex NkurunzizaNo ratings yet
- DGPS-Report BajhangDocument18 pagesDGPS-Report BajhangPrekshan SubediNo ratings yet
- LECTURE 3bii - 20232Document36 pagesLECTURE 3bii - 20232udaimatunnuraliasNo ratings yet
- 10.GPS Lect.10Document18 pages10.GPS Lect.10tofa abiNo ratings yet
- Dual-Frequency GPS/GLONASS RTK: Experimental Results: Javad Positioning SystemsDocument4 pagesDual-Frequency GPS/GLONASS RTK: Experimental Results: Javad Positioning SystemsСергей ТатарченкоNo ratings yet
- B3 G4 210925 Sandipan Lab8Document4 pagesB3 G4 210925 Sandipan Lab8Shishir ChaudharyNo ratings yet
- Satellite Navigation and Position Technology 2016: Final Paper Comparative Study Between SPP and DGPS Using RTKLIBDocument12 pagesSatellite Navigation and Position Technology 2016: Final Paper Comparative Study Between SPP and DGPS Using RTKLIBBouchiba MohammedNo ratings yet
- Chapter 6 - GPS Data ProcessingDocument6 pagesChapter 6 - GPS Data ProcessingtsegayeyayeleNo ratings yet
- A Multipoit Snow Depth Measurement SystemDocument11 pagesA Multipoit Snow Depth Measurement Systemyassine koraichiNo ratings yet
- Lecture 3 - Data Capturing Techniques - Total Station and GPSDocument26 pagesLecture 3 - Data Capturing Techniques - Total Station and GPSCisco ManNo ratings yet
- Traversing Notes - Surveying II - Sudip Khadka - CivilengineeringDocument37 pagesTraversing Notes - Surveying II - Sudip Khadka - CivilengineeringSudip KhadkaNo ratings yet
- Comparison of Different Survey: Jay Patel - Uct20064Document8 pagesComparison of Different Survey: Jay Patel - Uct20064Jay PatelNo ratings yet
- CL HDCVL 17 04Document11 pagesCL HDCVL 17 04Hanash ShameeNo ratings yet
- Geospatial Positioning System - 1Document72 pagesGeospatial Positioning System - 1Jecinta wNo ratings yet
- Bec 401 Thesis Ii: TOPIC: Accuracy Comparison Between Ground Control Survey and Differential Global Positioning SystemDocument39 pagesBec 401 Thesis Ii: TOPIC: Accuracy Comparison Between Ground Control Survey and Differential Global Positioning SystemAlvinchiew CSNo ratings yet
- l4 Control Survey TraverseDocument23 pagesl4 Control Survey TraverseSerinaaNo ratings yet
- Field Techniques Manual: GIS, GPS and Remote Sensing: - Section B: DataDocument34 pagesField Techniques Manual: GIS, GPS and Remote Sensing: - Section B: Datasbabic44No ratings yet
- QMOD4Document10 pagesQMOD427.04.1975cmNo ratings yet
- GNSS - Assignment QuestionsDocument2 pagesGNSS - Assignment QuestionsPavan ParthikNo ratings yet
- The Impact of GPS Antenna Phase Center Offset and Variation On The Positioning AccuracyDocument27 pagesThe Impact of GPS Antenna Phase Center Offset and Variation On The Positioning AccuracyAkiraTsaiNo ratings yet
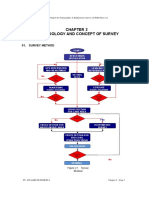
- Methodology and Concept of SurveyDocument20 pagesMethodology and Concept of SurveyCimanuk Cisanggarung riverNo ratings yet
- Lecture 4th Navigation 8Document5 pagesLecture 4th Navigation 8Ahmed WasifNo ratings yet
- Procedure: Topographical SurveyingDocument11 pagesProcedure: Topographical SurveyingMohammad Hadi NazariNo ratings yet
- Coordinate Transformation DGTSDocument12 pagesCoordinate Transformation DGTSnurhazli ibrahimNo ratings yet
- 3MRK4 - 09 - Farhan Ayuhan Fahmi - Passive Voice - Bit2Document11 pages3MRK4 - 09 - Farhan Ayuhan Fahmi - Passive Voice - Bit2Prass JulianNo ratings yet
- Evaluation of RTK-GPS and Total Station For Applications in Land SurveyingDocument7 pagesEvaluation of RTK-GPS and Total Station For Applications in Land SurveyingSivananthaa MurtheeNo ratings yet
- Ehs6-Theodolite, Transit & Total Station (Without Videos)Document19 pagesEhs6-Theodolite, Transit & Total Station (Without Videos)Ariane Vince Gutierrez TuliaoNo ratings yet
- Theodlite ResectionDocument31 pagesTheodlite ResectionRipzan xhtNo ratings yet
- Accuracy of DTM Generated From Spot 4 and Spot 5 Hrs Data: Commission IV, WG IV/6Document5 pagesAccuracy of DTM Generated From Spot 4 and Spot 5 Hrs Data: Commission IV, WG IV/6Kobalt von KriegerischbergNo ratings yet
- (LBYCV2A) EXER #06-07 Locating Lots and Mapping Lot Boundaries Using GPS Mobile AppDocument10 pages(LBYCV2A) EXER #06-07 Locating Lots and Mapping Lot Boundaries Using GPS Mobile AppJemina SamsonNo ratings yet
- Precise Orbit Determination of Low Earth Satellites Using SST Data - 1997 - Advances in Space ResearchDocument4 pagesPrecise Orbit Determination of Low Earth Satellites Using SST Data - 1997 - Advances in Space ResearchFabio HochleitnerNo ratings yet
- 03 - Total Station Traverse PracticalDocument6 pages03 - Total Station Traverse Practicalwi.nn.yNo ratings yet
- Laying Out The Road Line - Study MaterialDocument9 pagesLaying Out The Road Line - Study MaterialManogna Sai PadiNo ratings yet
- TheodoDocument42 pagesTheodoRupesh SahNo ratings yet
- Laboratory & Survey Camp UpdatedDocument20 pagesLaboratory & Survey Camp UpdatedSUNNYWAY CONSTRUCTIONNo ratings yet
- DGPS SurveyDocument25 pagesDGPS SurveyBHUSHAN KANOJ100% (1)
- How To Write A Seminar PaperDocument7 pagesHow To Write A Seminar Papertemujin03No ratings yet
- Parent Feedback FormDocument1 pageParent Feedback FormKunal Khandelwal100% (2)
- 31 Legacy A2 Tests KeyDocument15 pages31 Legacy A2 Tests KeyFiliz BaakiNo ratings yet
- Capacity-Building: An Approach To People-Centred DevelopmentDocument82 pagesCapacity-Building: An Approach To People-Centred DevelopmentOxfam100% (4)
- VOL 7 No. 2 PDFDocument72 pagesVOL 7 No. 2 PDFShantanuNo ratings yet
- Certificate and Experiance M.SC. (Honors) DegreeDocument16 pagesCertificate and Experiance M.SC. (Honors) DegreeKonj MohamedNo ratings yet
- Costumizing Slax LinuxDocument32 pagesCostumizing Slax Linuxsix ballackNo ratings yet
- Digital Media and Young ChildrenDocument2 pagesDigital Media and Young ChildrenMother Goose on the Loose, LLCNo ratings yet
- Linux SchedulingDocument20 pagesLinux SchedulingThuy PhanNo ratings yet
- Food Chemistry: M.S. Altaki, F.J. Santos, M.T. GalceranDocument6 pagesFood Chemistry: M.S. Altaki, F.J. Santos, M.T. GalceranAberuNo ratings yet
- NLP Modelling UndisclosedDocument15 pagesNLP Modelling UndisclosedMarco Gallico0% (1)
- Nurs2105td Int 2008Document12 pagesNurs2105td Int 2008api-3703791100% (1)
- Lab 09@cs 121Document4 pagesLab 09@cs 121Saif HassanNo ratings yet
- A Survey On Performance Enhancement of MIMO-CDMA SystemsDocument3 pagesA Survey On Performance Enhancement of MIMO-CDMA SystemsG RajenderNo ratings yet
- SwadesDocument17 pagesSwadesSheetal billoreNo ratings yet
- Lab Discussion and Conclusion Report PDFDocument2 pagesLab Discussion and Conclusion Report PDFRadz Krishz100% (1)
- Tally ERP9 PDFDocument8 pagesTally ERP9 PDFRizwan AhmedNo ratings yet
- As 5013.21-2004 Food Microbiology Meat and Meat Products - Enumeration of Pseudomonas Spp.Document4 pagesAs 5013.21-2004 Food Microbiology Meat and Meat Products - Enumeration of Pseudomonas Spp.SAI Global - APACNo ratings yet
- RegDocument2 pagesRegloctranhoangNo ratings yet
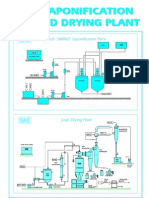
- +sapo & Drying PlantDocument4 pages+sapo & Drying Plantزياد محمدNo ratings yet
- Most Essential Learning Competencies: Grade Level: Subject: MathematicsDocument4 pagesMost Essential Learning Competencies: Grade Level: Subject: MathematicsJaz Zele100% (3)
- 1.2 MatricesDocument5 pages1.2 MatricesNur LiyaniNo ratings yet
- Alan Lu Challenges of Large Heap Leach Pad Design in Northern ChinaDocument20 pagesAlan Lu Challenges of Large Heap Leach Pad Design in Northern ChinaYesi CeballosNo ratings yet
- Concept NoteDocument11 pagesConcept NoteJairos ShinzehNo ratings yet
- Biological Science - Plant Growth and SurvivalDocument28 pagesBiological Science - Plant Growth and Survivalapi-419408664No ratings yet
- CtreedbDocument755 pagesCtreedbkeyprocessorNo ratings yet
- Gaurav Bansal CVDocument3 pagesGaurav Bansal CVKarumanchi RamakrishnaNo ratings yet
- Embankments On Soft SoilsDocument8 pagesEmbankments On Soft SoilsAdrian Liviu BugeaNo ratings yet
- 70 Powerful F1 Visa Interview TipsDocument8 pages70 Powerful F1 Visa Interview TipsKIISHAN DARJINo ratings yet