
Modules
Modules
You might also like
- Original PDF Design of Water Resource Recovery Facilities Manual of Practice No 8 6th Edition PDFDocument41 pagesOriginal PDF Design of Water Resource Recovery Facilities Manual of Practice No 8 6th Edition PDFcynthia.stewart295100% (37)
- Homework #6, Sec 11.4 and 12.1Document6 pagesHomework #6, Sec 11.4 and 12.1Masaya Sato100% (1)
- Homework #1, Sec 10.1Document5 pagesHomework #1, Sec 10.1Masaya Sato67% (3)
- Cardinal 748Document47 pagesCardinal 748Juan MontufarNo ratings yet
- CMP Final Draft FuelDocument33 pagesCMP Final Draft Fuelapi-594648232No ratings yet
- Instant Download Triumph Bonneville T100 Repair ManualDocument482 pagesInstant Download Triumph Bonneville T100 Repair Manualdcapito4017100% (1)
- Math 323: Solutions To Homework 9Document8 pagesMath 323: Solutions To Homework 9AlbertoAlcaláNo ratings yet
- Holmes-Poirot DocumentDocument2 pagesHolmes-Poirot Documentapi-242851904No ratings yet
- Noetherian AlgebrasDocument60 pagesNoetherian Algebrasyacp16761No ratings yet
- Linear Alg Notes 2018Document30 pagesLinear Alg Notes 2018Jose Luis GiriNo ratings yet
- The Jacobson RadicalDocument7 pagesThe Jacobson RadicalAlan CorderoNo ratings yet
- Module Versus Vector SpaceDocument10 pagesModule Versus Vector SpaceDr. P.K.Sharma100% (2)
- Sup RegDocument9 pagesSup Regyacp1No ratings yet
- Cohomology of Groups: Brita NucinkisDocument37 pagesCohomology of Groups: Brita NucinkisLusti Ayu YuniartiNo ratings yet
- (Expository Notes) David Savitt - Noncommutative Algebra For Part III of Serre's Linear Representations of Finite Groups (2010) - Libgen - LiDocument50 pages(Expository Notes) David Savitt - Noncommutative Algebra For Part III of Serre's Linear Representations of Finite Groups (2010) - Libgen - Lilewidomydecabg.euNo ratings yet
- Principal Ideal Domains: 1 Generalities On Commutative RingsDocument23 pagesPrincipal Ideal Domains: 1 Generalities On Commutative RingsArie HariadyNo ratings yet
- Rings of Definable Scalars of Verma ModulesDocument11 pagesRings of Definable Scalars of Verma ModulesKhalothNo ratings yet
- Radicals and Artinian RingsDocument4 pagesRadicals and Artinian RingsngocbichblNo ratings yet
- Module Versus Vector Space (Extended Form)Document12 pagesModule Versus Vector Space (Extended Form)pksharma_davc2425No ratings yet
- Completion: 4.1 Graded Rings and ModulesDocument10 pagesCompletion: 4.1 Graded Rings and ModulesAasif DarNo ratings yet
- A Problem Course in Module TheoryDocument22 pagesA Problem Course in Module TheoryPurbayan Chakraborty100% (1)
- Honors Algebra 4, MATH 371 Winter 2010: Assignment 5 SolutionsDocument7 pagesHonors Algebra 4, MATH 371 Winter 2010: Assignment 5 SolutionsAlbertoAlcaláNo ratings yet
- A Problem Course in Module TheoryDocument21 pagesA Problem Course in Module TheoryKelloggNo ratings yet
- Riemannian Geometry and Mathematical Physics: Vector Bundles and Gauge TheoriesDocument20 pagesRiemannian Geometry and Mathematical Physics: Vector Bundles and Gauge TheoriessilviohoffmannNo ratings yet
- Valuation RingsDocument5 pagesValuation RingsJodeNo ratings yet
- A Geometric Introduction To Commutative Algebra: This Is Still A Draft VersionDocument70 pagesA Geometric Introduction To Commutative Algebra: This Is Still A Draft VersionSr-Eko TundeNo ratings yet
- Derived Functors of /-Adic Completion and Local HomologyDocument16 pagesDerived Functors of /-Adic Completion and Local HomologyEpic WinNo ratings yet
- Lifting Idempotents and Projective Covers: KYUNGPOOK Math J. 41 (2001), 217-227Document11 pagesLifting Idempotents and Projective Covers: KYUNGPOOK Math J. 41 (2001), 217-227Dinesh KhuranaNo ratings yet
- Counting Monomials: 1. Introduction and PreliminariesDocument11 pagesCounting Monomials: 1. Introduction and PreliminariesQuốc TấnNo ratings yet
- Paper 1Document5 pagesPaper 1vaishnavi semwalNo ratings yet
- (U Is Called Unis-Erial If These Hold) : S:projectiveDocument7 pages(U Is Called Unis-Erial If These Hold) : S:projectiveChâu LoanNo ratings yet
- Wilkins - Introduction To Galois Theory - 311 PDFDocument44 pagesWilkins - Introduction To Galois Theory - 311 PDF1br4h1m0v1cNo ratings yet
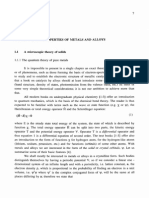
- Chapter 1 Structure and Properties of Metals and Alloys 1995 Studies in Surface Science and CatalysisDocument66 pagesChapter 1 Structure and Properties of Metals and Alloys 1995 Studies in Surface Science and CatalysisHenrique SouzaNo ratings yet
- On The Exponential Solution of Differential Equations For A Linear Operator PDFDocument25 pagesOn The Exponential Solution of Differential Equations For A Linear Operator PDFzhihong zuoNo ratings yet
- NullstellensatzDocument2 pagesNullstellensatzShintaNo ratings yet
- Motiv IgusaDocument34 pagesMotiv IgusaJan DenefNo ratings yet
- 06Document6 pages06Omayma gamalNo ratings yet
- Liouville's Theorem On Integration in Terms of Elementary FunctionsDocument26 pagesLiouville's Theorem On Integration in Terms of Elementary FunctionsVigen ChaltikyanNo ratings yet
- RingsDocument30 pagesRingsWenyi GuoNo ratings yet
- Linear AlgebraDocument7 pagesLinear Algebrataych03No ratings yet
- Lecture 1: Renormalization Groups David Gross 1.1. What Is Renormalization Group?Document9 pagesLecture 1: Renormalization Groups David Gross 1.1. What Is Renormalization Group?luisdanielNo ratings yet
- Riemann Zeta - Cones PDFDocument24 pagesRiemann Zeta - Cones PDFjohn_k7408No ratings yet
- HW 4 SolDocument4 pagesHW 4 SolKhánh HuyềnNo ratings yet
- Introduction To Algebraic Geometry: Igor V. Dolgachev August 19, 2013Document198 pagesIntroduction To Algebraic Geometry: Igor V. Dolgachev August 19, 2013محمد عبد حسينNo ratings yet
- Mathematic EncyclopediaDocument1,290 pagesMathematic EncyclopediaSrećkoŠojić100% (1)
- Selected Exercises From Abstract Algebra by Dummit and Foote (3rd Edition)Document5 pagesSelected Exercises From Abstract Algebra by Dummit and Foote (3rd Edition)Noor FatimaNo ratings yet
- nonEucPID (4 Files Merged) 2Document7 pagesnonEucPID (4 Files Merged) 2TheAkHolicNo ratings yet
- Quotient Spaces and Quotient Maps: 22M:132 Fall 07 J. SimonDocument6 pagesQuotient Spaces and Quotient Maps: 22M:132 Fall 07 J. SimonBear TeddyNo ratings yet
- EtaleDocument16 pagesEtaleVikas SrivastavaNo ratings yet
- MIT18 785F19 Full Notes PDFDocument297 pagesMIT18 785F19 Full Notes PDFsai pavanNo ratings yet
- Lindsay R. B., Seeger R. J. - Operational Calculus in Quantum Mechanics. Some Critical Comments and The Solution of Special Problems (1930)Document10 pagesLindsay R. B., Seeger R. J. - Operational Calculus in Quantum Mechanics. Some Critical Comments and The Solution of Special Problems (1930)ChinsinNo ratings yet
- Isometries of RNDocument5 pagesIsometries of RNfelipeplatziNo ratings yet
- 1netwo3 PDFDocument297 pages1netwo3 PDF채희진No ratings yet
- Mit18 785f21 Lec1Document9 pagesMit18 785f21 Lec1NO NameNo ratings yet
- Commutative RingDocument7 pagesCommutative RingAnurag SinghNo ratings yet
- Eigenvalues, Eigenvectors, and Eigenspaces of Linear Operators Math 130 Linear AlgebraDocument3 pagesEigenvalues, Eigenvectors, and Eigenspaces of Linear Operators Math 130 Linear AlgebraCody SageNo ratings yet
- EigenvaluesDocument6 pagesEigenvaluesAnonymous 7oXNA46xiNNo ratings yet
- Ring Theory Background: 0.1 Prime AvoidanceDocument7 pagesRing Theory Background: 0.1 Prime Avoidancesticker592No ratings yet
- Math 202 - Assignment 2 SolutionsDocument7 pagesMath 202 - Assignment 2 SolutionsKingsley AyensuNo ratings yet
- Complex Numbers Edition 10Document44 pagesComplex Numbers Edition 10bromikeseriesNo ratings yet
- Complex Numbers and StatsDocument41 pagesComplex Numbers and StatsbromikeseriesNo ratings yet
- Simultaneous Diagonalization of Two Quadratic Forms and A Generalized Eigenvalue ProblemDocument7 pagesSimultaneous Diagonalization of Two Quadratic Forms and A Generalized Eigenvalue ProblemMalika BehroozrazeghNo ratings yet
- Module Theory SyllabusDocument1 pageModule Theory Syllabuskishalay sarkarNo ratings yet
- Tensor ProductDocument2 pagesTensor Productkishalay sarkarNo ratings yet
- Recurrent PointsDocument1 pageRecurrent Pointskishalay sarkarNo ratings yet
- Application of Calculus, B.SC, Notes On Arc LengthDocument4 pagesApplication of Calculus, B.SC, Notes On Arc Lengthkishalay sarkarNo ratings yet
- Doubts of MathematicsDocument2 pagesDoubts of Mathematicskishalay sarkarNo ratings yet
- An Inquiry-Based Approach To Abstract Algebra PDFDocument123 pagesAn Inquiry-Based Approach To Abstract Algebra PDFkishalay sarkarNo ratings yet
- Topological Ideas BINMORE PDFDocument262 pagesTopological Ideas BINMORE PDFkishalay sarkar100% (1)
- Siena 2015 Franco Test PDFDocument8 pagesSiena 2015 Franco Test PDFkishalay sarkarNo ratings yet
- Full Rank Decomposition From Row Reduced Echelon MatrixDocument11 pagesFull Rank Decomposition From Row Reduced Echelon Matrixkishalay sarkarNo ratings yet
- IVPDocument16 pagesIVPkishalay sarkarNo ratings yet
- Herstein: Topics in Algebra - Subgroups and A Counting PrincipleDocument1 pageHerstein: Topics in Algebra - Subgroups and A Counting Principlekishalay sarkarNo ratings yet
- Assignment3 PDFDocument2 pagesAssignment3 PDFkishalay sarkarNo ratings yet
- Lec 3Document18 pagesLec 3kishalay sarkarNo ratings yet
- Books RequiredDocument1 pageBooks Requiredkishalay sarkarNo ratings yet
- Existence and Uniqueness Theorem PDFDocument2 pagesExistence and Uniqueness Theorem PDFkishalay sarkarNo ratings yet
- Lec 4Document15 pagesLec 4kishalay sarkarNo ratings yet
- Assignment 4Document13 pagesAssignment 4kishalay sarkarNo ratings yet
- Lec 1Document16 pagesLec 1kishalay sarkarNo ratings yet
- Sequence of FucntionsDocument15 pagesSequence of Fucntionskishalay sarkarNo ratings yet
- Lec 9Document17 pagesLec 9kishalay sarkarNo ratings yet
- Notes of Cost (Microeconomics)Document10 pagesNotes of Cost (Microeconomics)Nishant DoshiNo ratings yet
- Steven Johnsons SyndromeDocument22 pagesSteven Johnsons SyndromeRoselene Mae MarasiganNo ratings yet
- Topic 1: Introduction To Nursing TheoryDocument24 pagesTopic 1: Introduction To Nursing Theoryalmira garciaNo ratings yet
- Working at Heights: Engr. Jobelle B MalaygayDocument50 pagesWorking at Heights: Engr. Jobelle B MalaygayJohn Cedrik Retardo100% (1)
- ShaykhNazimHaqqani MercyOceansBookOne PDFDocument208 pagesShaykhNazimHaqqani MercyOceansBookOne PDFNishaat Parween NaqshbandiNo ratings yet
- Technical Interview Questions - Active DirectoryDocument74 pagesTechnical Interview Questions - Active DirectoryMadhava SwamyNo ratings yet
- Satellite Communication NotesDocument17 pagesSatellite Communication NotesAkhil RajuNo ratings yet
- A Century of Chromatography and Volume 1000 of The Journal of ChromatographyDocument2 pagesA Century of Chromatography and Volume 1000 of The Journal of ChromatographyWillmann Jimenez MoralesNo ratings yet
- Aluminum 2024-T4-2024-T351Document3 pagesAluminum 2024-T4-2024-T351Raj EklureNo ratings yet
- Pipes Angles BM 22 36 en - 2Document1 pagePipes Angles BM 22 36 en - 2elias aouadNo ratings yet
- Analysis of Paraquat Dichloride in Pesticides Using UV-Spectrophotometer.Document14 pagesAnalysis of Paraquat Dichloride in Pesticides Using UV-Spectrophotometer.OFURUM FRANKLYNNo ratings yet
- Homeostasis Lab PDFDocument2 pagesHomeostasis Lab PDFSip BioNo ratings yet
- 2 Hernandez Et Al 2005 Polychaeta BiogeographyDocument11 pages2 Hernandez Et Al 2005 Polychaeta BiogeographyViskar RyuuNo ratings yet
- 4634 Lectures Labs 1 11 1Document212 pages4634 Lectures Labs 1 11 1Tiago Nunes0% (2)
- PT0-101 NetworkArmyDocument84 pagesPT0-101 NetworkArmyMohammad Malek KhataeiNo ratings yet
- The Efficiency of Electrocoagulation in Treating Wastewater From A Dairy Industry, Part I: Iron ElectrodesDocument8 pagesThe Efficiency of Electrocoagulation in Treating Wastewater From A Dairy Industry, Part I: Iron ElectrodesazerfazNo ratings yet
- Back To School LiturgyDocument2 pagesBack To School LiturgyChristopher C HootonNo ratings yet
- Ntroduction: Dr. Hammad Iqbal SheraziDocument14 pagesNtroduction: Dr. Hammad Iqbal SherazisamoleNo ratings yet
- SkyGuard JammerDocument1 pageSkyGuard JammerBibit Budi PratamaNo ratings yet
- Islam Managment AssigmentDocument30 pagesIslam Managment AssigmentNurul FarahidaNo ratings yet
- Oleh: Riris Retno Wulan, Mochammad MustamDocument20 pagesOleh: Riris Retno Wulan, Mochammad MustamMario100% (1)
- Android Quiz App 22617 MADDocument19 pagesAndroid Quiz App 22617 MADSandip kotkarNo ratings yet
- Homework 2 - 202881 - 01 - SentDocument3 pagesHomework 2 - 202881 - 01 - SentDavid E. MuñozNo ratings yet
- Ilovepdf MergedDocument144 pagesIlovepdf MergedChandra PrakashNo ratings yet
- Concurrent EngineeringDocument16 pagesConcurrent EngineeringAnusha MandavaNo ratings yet











































































































Download as pdf or txt
You might also like
- Original PDF Design of Water Resource Recovery Facilities Manual of Practice No 8 6th Edition PDFDocument41 pagesOriginal PDF Design of Water Resource Recovery Facilities Manual of Practice No 8 6th Edition PDFcynthia.stewart295100% (37)
- Homework #6, Sec 11.4 and 12.1Document6 pagesHomework #6, Sec 11.4 and 12.1Masaya Sato100% (1)
- Homework #1, Sec 10.1Document5 pagesHomework #1, Sec 10.1Masaya Sato67% (3)
- Cardinal 748Document47 pagesCardinal 748Juan MontufarNo ratings yet
- CMP Final Draft FuelDocument33 pagesCMP Final Draft Fuelapi-594648232No ratings yet
- Instant Download Triumph Bonneville T100 Repair ManualDocument482 pagesInstant Download Triumph Bonneville T100 Repair Manualdcapito4017100% (1)
- Math 323: Solutions To Homework 9Document8 pagesMath 323: Solutions To Homework 9AlbertoAlcaláNo ratings yet
- Holmes-Poirot DocumentDocument2 pagesHolmes-Poirot Documentapi-242851904No ratings yet
- Noetherian AlgebrasDocument60 pagesNoetherian Algebrasyacp16761No ratings yet
- Linear Alg Notes 2018Document30 pagesLinear Alg Notes 2018Jose Luis GiriNo ratings yet
- The Jacobson RadicalDocument7 pagesThe Jacobson RadicalAlan CorderoNo ratings yet
- Module Versus Vector SpaceDocument10 pagesModule Versus Vector SpaceDr. P.K.Sharma100% (2)
- Sup RegDocument9 pagesSup Regyacp1No ratings yet
- Cohomology of Groups: Brita NucinkisDocument37 pagesCohomology of Groups: Brita NucinkisLusti Ayu YuniartiNo ratings yet
- (Expository Notes) David Savitt - Noncommutative Algebra For Part III of Serre's Linear Representations of Finite Groups (2010) - Libgen - LiDocument50 pages(Expository Notes) David Savitt - Noncommutative Algebra For Part III of Serre's Linear Representations of Finite Groups (2010) - Libgen - Lilewidomydecabg.euNo ratings yet
- Principal Ideal Domains: 1 Generalities On Commutative RingsDocument23 pagesPrincipal Ideal Domains: 1 Generalities On Commutative RingsArie HariadyNo ratings yet
- Rings of Definable Scalars of Verma ModulesDocument11 pagesRings of Definable Scalars of Verma ModulesKhalothNo ratings yet
- Radicals and Artinian RingsDocument4 pagesRadicals and Artinian RingsngocbichblNo ratings yet
- Module Versus Vector Space (Extended Form)Document12 pagesModule Versus Vector Space (Extended Form)pksharma_davc2425No ratings yet
- Completion: 4.1 Graded Rings and ModulesDocument10 pagesCompletion: 4.1 Graded Rings and ModulesAasif DarNo ratings yet
- A Problem Course in Module TheoryDocument22 pagesA Problem Course in Module TheoryPurbayan Chakraborty100% (1)
- Honors Algebra 4, MATH 371 Winter 2010: Assignment 5 SolutionsDocument7 pagesHonors Algebra 4, MATH 371 Winter 2010: Assignment 5 SolutionsAlbertoAlcaláNo ratings yet
- A Problem Course in Module TheoryDocument21 pagesA Problem Course in Module TheoryKelloggNo ratings yet
- Riemannian Geometry and Mathematical Physics: Vector Bundles and Gauge TheoriesDocument20 pagesRiemannian Geometry and Mathematical Physics: Vector Bundles and Gauge TheoriessilviohoffmannNo ratings yet
- Valuation RingsDocument5 pagesValuation RingsJodeNo ratings yet
- A Geometric Introduction To Commutative Algebra: This Is Still A Draft VersionDocument70 pagesA Geometric Introduction To Commutative Algebra: This Is Still A Draft VersionSr-Eko TundeNo ratings yet
- Derived Functors of /-Adic Completion and Local HomologyDocument16 pagesDerived Functors of /-Adic Completion and Local HomologyEpic WinNo ratings yet
- Lifting Idempotents and Projective Covers: KYUNGPOOK Math J. 41 (2001), 217-227Document11 pagesLifting Idempotents and Projective Covers: KYUNGPOOK Math J. 41 (2001), 217-227Dinesh KhuranaNo ratings yet
- Counting Monomials: 1. Introduction and PreliminariesDocument11 pagesCounting Monomials: 1. Introduction and PreliminariesQuốc TấnNo ratings yet
- Paper 1Document5 pagesPaper 1vaishnavi semwalNo ratings yet
- (U Is Called Unis-Erial If These Hold) : S:projectiveDocument7 pages(U Is Called Unis-Erial If These Hold) : S:projectiveChâu LoanNo ratings yet
- Wilkins - Introduction To Galois Theory - 311 PDFDocument44 pagesWilkins - Introduction To Galois Theory - 311 PDF1br4h1m0v1cNo ratings yet
- Chapter 1 Structure and Properties of Metals and Alloys 1995 Studies in Surface Science and CatalysisDocument66 pagesChapter 1 Structure and Properties of Metals and Alloys 1995 Studies in Surface Science and CatalysisHenrique SouzaNo ratings yet
- On The Exponential Solution of Differential Equations For A Linear Operator PDFDocument25 pagesOn The Exponential Solution of Differential Equations For A Linear Operator PDFzhihong zuoNo ratings yet
- NullstellensatzDocument2 pagesNullstellensatzShintaNo ratings yet
- Motiv IgusaDocument34 pagesMotiv IgusaJan DenefNo ratings yet
- 06Document6 pages06Omayma gamalNo ratings yet
- Liouville's Theorem On Integration in Terms of Elementary FunctionsDocument26 pagesLiouville's Theorem On Integration in Terms of Elementary FunctionsVigen ChaltikyanNo ratings yet
- RingsDocument30 pagesRingsWenyi GuoNo ratings yet
- Linear AlgebraDocument7 pagesLinear Algebrataych03No ratings yet
- Lecture 1: Renormalization Groups David Gross 1.1. What Is Renormalization Group?Document9 pagesLecture 1: Renormalization Groups David Gross 1.1. What Is Renormalization Group?luisdanielNo ratings yet
- Riemann Zeta - Cones PDFDocument24 pagesRiemann Zeta - Cones PDFjohn_k7408No ratings yet
- HW 4 SolDocument4 pagesHW 4 SolKhánh HuyềnNo ratings yet
- Introduction To Algebraic Geometry: Igor V. Dolgachev August 19, 2013Document198 pagesIntroduction To Algebraic Geometry: Igor V. Dolgachev August 19, 2013محمد عبد حسينNo ratings yet
- Mathematic EncyclopediaDocument1,290 pagesMathematic EncyclopediaSrećkoŠojić100% (1)
- Selected Exercises From Abstract Algebra by Dummit and Foote (3rd Edition)Document5 pagesSelected Exercises From Abstract Algebra by Dummit and Foote (3rd Edition)Noor FatimaNo ratings yet
- nonEucPID (4 Files Merged) 2Document7 pagesnonEucPID (4 Files Merged) 2TheAkHolicNo ratings yet
- Quotient Spaces and Quotient Maps: 22M:132 Fall 07 J. SimonDocument6 pagesQuotient Spaces and Quotient Maps: 22M:132 Fall 07 J. SimonBear TeddyNo ratings yet
- EtaleDocument16 pagesEtaleVikas SrivastavaNo ratings yet
- MIT18 785F19 Full Notes PDFDocument297 pagesMIT18 785F19 Full Notes PDFsai pavanNo ratings yet
- Lindsay R. B., Seeger R. J. - Operational Calculus in Quantum Mechanics. Some Critical Comments and The Solution of Special Problems (1930)Document10 pagesLindsay R. B., Seeger R. J. - Operational Calculus in Quantum Mechanics. Some Critical Comments and The Solution of Special Problems (1930)ChinsinNo ratings yet
- Isometries of RNDocument5 pagesIsometries of RNfelipeplatziNo ratings yet
- 1netwo3 PDFDocument297 pages1netwo3 PDF채희진No ratings yet
- Mit18 785f21 Lec1Document9 pagesMit18 785f21 Lec1NO NameNo ratings yet
- Commutative RingDocument7 pagesCommutative RingAnurag SinghNo ratings yet
- Eigenvalues, Eigenvectors, and Eigenspaces of Linear Operators Math 130 Linear AlgebraDocument3 pagesEigenvalues, Eigenvectors, and Eigenspaces of Linear Operators Math 130 Linear AlgebraCody SageNo ratings yet
- EigenvaluesDocument6 pagesEigenvaluesAnonymous 7oXNA46xiNNo ratings yet
- Ring Theory Background: 0.1 Prime AvoidanceDocument7 pagesRing Theory Background: 0.1 Prime Avoidancesticker592No ratings yet
- Math 202 - Assignment 2 SolutionsDocument7 pagesMath 202 - Assignment 2 SolutionsKingsley AyensuNo ratings yet
- Complex Numbers Edition 10Document44 pagesComplex Numbers Edition 10bromikeseriesNo ratings yet
- Complex Numbers and StatsDocument41 pagesComplex Numbers and StatsbromikeseriesNo ratings yet
- Simultaneous Diagonalization of Two Quadratic Forms and A Generalized Eigenvalue ProblemDocument7 pagesSimultaneous Diagonalization of Two Quadratic Forms and A Generalized Eigenvalue ProblemMalika BehroozrazeghNo ratings yet
- Module Theory SyllabusDocument1 pageModule Theory Syllabuskishalay sarkarNo ratings yet
- Tensor ProductDocument2 pagesTensor Productkishalay sarkarNo ratings yet
- Recurrent PointsDocument1 pageRecurrent Pointskishalay sarkarNo ratings yet
- Application of Calculus, B.SC, Notes On Arc LengthDocument4 pagesApplication of Calculus, B.SC, Notes On Arc Lengthkishalay sarkarNo ratings yet
- Doubts of MathematicsDocument2 pagesDoubts of Mathematicskishalay sarkarNo ratings yet
- An Inquiry-Based Approach To Abstract Algebra PDFDocument123 pagesAn Inquiry-Based Approach To Abstract Algebra PDFkishalay sarkarNo ratings yet
- Topological Ideas BINMORE PDFDocument262 pagesTopological Ideas BINMORE PDFkishalay sarkar100% (1)
- Siena 2015 Franco Test PDFDocument8 pagesSiena 2015 Franco Test PDFkishalay sarkarNo ratings yet
- Full Rank Decomposition From Row Reduced Echelon MatrixDocument11 pagesFull Rank Decomposition From Row Reduced Echelon Matrixkishalay sarkarNo ratings yet
- IVPDocument16 pagesIVPkishalay sarkarNo ratings yet
- Herstein: Topics in Algebra - Subgroups and A Counting PrincipleDocument1 pageHerstein: Topics in Algebra - Subgroups and A Counting Principlekishalay sarkarNo ratings yet
- Assignment3 PDFDocument2 pagesAssignment3 PDFkishalay sarkarNo ratings yet
- Lec 3Document18 pagesLec 3kishalay sarkarNo ratings yet
- Books RequiredDocument1 pageBooks Requiredkishalay sarkarNo ratings yet
- Existence and Uniqueness Theorem PDFDocument2 pagesExistence and Uniqueness Theorem PDFkishalay sarkarNo ratings yet
- Lec 4Document15 pagesLec 4kishalay sarkarNo ratings yet
- Assignment 4Document13 pagesAssignment 4kishalay sarkarNo ratings yet
- Lec 1Document16 pagesLec 1kishalay sarkarNo ratings yet
- Sequence of FucntionsDocument15 pagesSequence of Fucntionskishalay sarkarNo ratings yet
- Lec 9Document17 pagesLec 9kishalay sarkarNo ratings yet
- Notes of Cost (Microeconomics)Document10 pagesNotes of Cost (Microeconomics)Nishant DoshiNo ratings yet
- Steven Johnsons SyndromeDocument22 pagesSteven Johnsons SyndromeRoselene Mae MarasiganNo ratings yet
- Topic 1: Introduction To Nursing TheoryDocument24 pagesTopic 1: Introduction To Nursing Theoryalmira garciaNo ratings yet
- Working at Heights: Engr. Jobelle B MalaygayDocument50 pagesWorking at Heights: Engr. Jobelle B MalaygayJohn Cedrik Retardo100% (1)
- ShaykhNazimHaqqani MercyOceansBookOne PDFDocument208 pagesShaykhNazimHaqqani MercyOceansBookOne PDFNishaat Parween NaqshbandiNo ratings yet
- Technical Interview Questions - Active DirectoryDocument74 pagesTechnical Interview Questions - Active DirectoryMadhava SwamyNo ratings yet
- Satellite Communication NotesDocument17 pagesSatellite Communication NotesAkhil RajuNo ratings yet
- A Century of Chromatography and Volume 1000 of The Journal of ChromatographyDocument2 pagesA Century of Chromatography and Volume 1000 of The Journal of ChromatographyWillmann Jimenez MoralesNo ratings yet
- Aluminum 2024-T4-2024-T351Document3 pagesAluminum 2024-T4-2024-T351Raj EklureNo ratings yet
- Pipes Angles BM 22 36 en - 2Document1 pagePipes Angles BM 22 36 en - 2elias aouadNo ratings yet
- Analysis of Paraquat Dichloride in Pesticides Using UV-Spectrophotometer.Document14 pagesAnalysis of Paraquat Dichloride in Pesticides Using UV-Spectrophotometer.OFURUM FRANKLYNNo ratings yet
- Homeostasis Lab PDFDocument2 pagesHomeostasis Lab PDFSip BioNo ratings yet
- 2 Hernandez Et Al 2005 Polychaeta BiogeographyDocument11 pages2 Hernandez Et Al 2005 Polychaeta BiogeographyViskar RyuuNo ratings yet
- 4634 Lectures Labs 1 11 1Document212 pages4634 Lectures Labs 1 11 1Tiago Nunes0% (2)
- PT0-101 NetworkArmyDocument84 pagesPT0-101 NetworkArmyMohammad Malek KhataeiNo ratings yet
- The Efficiency of Electrocoagulation in Treating Wastewater From A Dairy Industry, Part I: Iron ElectrodesDocument8 pagesThe Efficiency of Electrocoagulation in Treating Wastewater From A Dairy Industry, Part I: Iron ElectrodesazerfazNo ratings yet
- Back To School LiturgyDocument2 pagesBack To School LiturgyChristopher C HootonNo ratings yet
- Ntroduction: Dr. Hammad Iqbal SheraziDocument14 pagesNtroduction: Dr. Hammad Iqbal SherazisamoleNo ratings yet
- SkyGuard JammerDocument1 pageSkyGuard JammerBibit Budi PratamaNo ratings yet
- Islam Managment AssigmentDocument30 pagesIslam Managment AssigmentNurul FarahidaNo ratings yet
- Oleh: Riris Retno Wulan, Mochammad MustamDocument20 pagesOleh: Riris Retno Wulan, Mochammad MustamMario100% (1)
- Android Quiz App 22617 MADDocument19 pagesAndroid Quiz App 22617 MADSandip kotkarNo ratings yet
- Homework 2 - 202881 - 01 - SentDocument3 pagesHomework 2 - 202881 - 01 - SentDavid E. MuñozNo ratings yet
- Ilovepdf MergedDocument144 pagesIlovepdf MergedChandra PrakashNo ratings yet
- Concurrent EngineeringDocument16 pagesConcurrent EngineeringAnusha MandavaNo ratings yet