Download as pdf or txt
You might also like
- Engineering Mechanics - An Introduction To Dynamics 4th Ed PDFDocument646 pagesEngineering Mechanics - An Introduction To Dynamics 4th Ed PDFRandom Person100% (2)
- Engineering Science N4 Summary NotesDocument1 pageEngineering Science N4 Summary Notesrcpretorius22% (9)
- Geophysical Fluid Dynamics-Problems 2009Document34 pagesGeophysical Fluid Dynamics-Problems 2009rafaelcostasantanaNo ratings yet
- Easy Notes On Mechanics Moment of Inertia PDFDocument48 pagesEasy Notes On Mechanics Moment of Inertia PDFFaisal Shabbir0% (2)
- 07 Lesson-4-Longitudinal-Vehicle-Modeling C1M4L4 - Longitudinal Vehicle ModelDocument9 pages07 Lesson-4-Longitudinal-Vehicle-Modeling C1M4L4 - Longitudinal Vehicle ModelprogisNo ratings yet
- A-level Physics Revision: Cheeky Revision ShortcutsFrom EverandA-level Physics Revision: Cheeky Revision ShortcutsRating: 3 out of 5 stars3/5 (10)
- Mastering Physics 3Document14 pagesMastering Physics 3ozilla_26_me0% (4)
- Solutions Manual PDFDocument964 pagesSolutions Manual PDFfwalker2013100% (1)
- Simple Pendulum Modelling Simulation 1686477167Document12 pagesSimple Pendulum Modelling Simulation 1686477167durssiNo ratings yet
- Vehicle Dynamics Planar Dynamics: Ho Chi Minh University of Technology Office of International Study & ProgramsDocument27 pagesVehicle Dynamics Planar Dynamics: Ho Chi Minh University of Technology Office of International Study & ProgramsĐại Quý NgôNo ratings yet
- Kinetics Forces AccelerationDocument86 pagesKinetics Forces AccelerationmusfiqurrahmananyNo ratings yet
- 7 Impulse and MomentumDocument3 pages7 Impulse and MomentumHassan FulaihNo ratings yet
- Control Theory Applications IDocument8 pagesControl Theory Applications IAtikah AbdallaNo ratings yet
- Chapter1 Part2Document25 pagesChapter1 Part2Godwin GyamfiNo ratings yet
- Angular Momentum: Momentum Analysis of Flow SystemsDocument26 pagesAngular Momentum: Momentum Analysis of Flow SystemsThomas DiazNo ratings yet
- Es 2 Lesson 2Document28 pagesEs 2 Lesson 2Ems CasabalNo ratings yet
- Brakes ModuleDocument11 pagesBrakes ModulebaramimNo ratings yet
- Module 1 - Kinematics of A ParticleDocument44 pagesModule 1 - Kinematics of A ParticleJohn HawkinsNo ratings yet
- Lec 2Document46 pagesLec 2ahmed EmadNo ratings yet
- Equation SheetDocument2 pagesEquation SheetStevenNo ratings yet
- Dynamics03 - Rotation MatricesDocument58 pagesDynamics03 - Rotation MatricesagfjtrsNo ratings yet
- Lecture 4Document58 pagesLecture 4saiedali2005No ratings yet
- Fluid Mechanics: 10 SessionDocument9 pagesFluid Mechanics: 10 SessionAmir MehrNo ratings yet
- Mechanical Vibration Ch-2Document73 pagesMechanical Vibration Ch-2Befikad BekeleNo ratings yet
- Kinematics of Particles: Polar Coordinates (r-θ)Document33 pagesKinematics of Particles: Polar Coordinates (r-θ)son gokuNo ratings yet
- Fluid Mechanics QuestionsDocument12 pagesFluid Mechanics QuestionsnaiaraNo ratings yet
- Stiffness 1Document31 pagesStiffness 1ahmed elgendyNo ratings yet
- Course 4 Modeling of Dynamic Systems in FDDocument23 pagesCourse 4 Modeling of Dynamic Systems in FDCend AkhinovNo ratings yet
- Lecture 3Document13 pagesLecture 3abdullahaamir2019No ratings yet
- Dom Course 20 21 10Document32 pagesDom Course 20 21 10emreasker22No ratings yet
- Power 3 - Lecture - No - 3Document28 pagesPower 3 - Lecture - No - 3Mahmoud BakirNo ratings yet
- Class 09 Rigid Bodies PDFDocument44 pagesClass 09 Rigid Bodies PDFAattreya BarthwalNo ratings yet
- Vector Calculus-Lec-1 & 2Document41 pagesVector Calculus-Lec-1 & 2Subhan MansoorNo ratings yet
- Physics 1 - LESSON 9 (Mid - Spring 24)Document14 pagesPhysics 1 - LESSON 9 (Mid - Spring 24)faisalfahim228No ratings yet
- Phy Unit 2 SlidesDocument189 pagesPhy Unit 2 SlidesriyapastayNo ratings yet
- Me 362 - 1Document47 pagesMe 362 - 1darkooscar2020No ratings yet
- Machine Problem Contents PDF FreeDocument23 pagesMachine Problem Contents PDF FreePedro Ian QuintanillaNo ratings yet
- Mec Vib Week 3 231019 140022Document30 pagesMec Vib Week 3 231019 140022nisatanir1No ratings yet
- Lecture IntegralAnalysis 2-17-18oct2022Document21 pagesLecture IntegralAnalysis 2-17-18oct2022Riddhiman GhatakNo ratings yet
- Raw:/storage/emulated/0/Download/ES 222 MODULE 5Document29 pagesRaw:/storage/emulated/0/Download/ES 222 MODULE 5Marvin Espenocilla EspeñoNo ratings yet
- CircuitDocument51 pagesCircuitmohammed quthahNo ratings yet
- MECH - 450 - Lab - Assignment - 2 CorrectingDocument14 pagesMECH - 450 - Lab - Assignment - 2 CorrectingYousef SkdNo ratings yet
- Dynamics: Introduction To Dynamics Kinematics of A ParticleDocument55 pagesDynamics: Introduction To Dynamics Kinematics of A ParticleThe VitalityNo ratings yet
- Week 3 - Lesson 2 - Rectangular MotionDocument12 pagesWeek 3 - Lesson 2 - Rectangular MotionNoel Himolatan Bolair Jr.No ratings yet
- Lecture 4 - Fluid Dynamics - Linear Momentum ConservationDocument5 pagesLecture 4 - Fluid Dynamics - Linear Momentum ConservationApdo MustafaNo ratings yet
- Sir Waqar PP NumericalsDocument17 pagesSir Waqar PP NumericalsMuhammad ArsalanNo ratings yet
- Flexibility 1 HDocument27 pagesFlexibility 1 Hمختار ابراهيمNo ratings yet
- Lect 6Document23 pagesLect 6Junaid Iqbal NaichNo ratings yet
- Control Theory Project 1 - Barak - Rafael - GradedDocument12 pagesControl Theory Project 1 - Barak - Rafael - GradedBarak HenenNo ratings yet
- QuestionsVertechy MoMfADocument95 pagesQuestionsVertechy MoMfASalvatore BamundoNo ratings yet
- Presentations 5Document6 pagesPresentations 5UsmanNo ratings yet
- Kinetics - Work and Energy MethodDocument44 pagesKinetics - Work and Energy MethodmusfiqurrahmananyNo ratings yet
- Motion in 2 DimensionsDocument8 pagesMotion in 2 Dimensionsmikel artetaNo ratings yet
- Mod 3Document18 pagesMod 3King AhmedNo ratings yet
- Kathmandu University: School of EngineeringDocument19 pagesKathmandu University: School of EngineeringBishal LamichhaneNo ratings yet
- Effect of Horizontal Tail On StabilityDocument10 pagesEffect of Horizontal Tail On StabilityAdriano_Axel_9404No ratings yet
- Rotational MechanicsDocument22 pagesRotational Mechanicsmitrasupratik42No ratings yet
- CINEMÁTICA DEL CUERPO RÍGIDO U2 HibDocument47 pagesCINEMÁTICA DEL CUERPO RÍGIDO U2 HibAyrton OchoaNo ratings yet
- Mechanical Vibrations Week 10: Extension To 2-DOF SystemsDocument8 pagesMechanical Vibrations Week 10: Extension To 2-DOF Systemszak masterNo ratings yet
- 7 - Analysis Based On State SpaceDocument44 pages7 - Analysis Based On State SpaceJosueNo ratings yet
- Chapter1 Part1Document41 pagesChapter1 Part1Godwin GyamfiNo ratings yet
- Week 10Document28 pagesWeek 10bcdali001No ratings yet
- Lec 01-1 - IntroductionDocument29 pagesLec 01-1 - IntroductionArslan MehmoodNo ratings yet
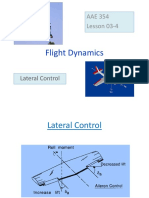
- Lec 03-4 - Lateral ControlDocument25 pagesLec 03-4 - Lateral ControlArslan MehmoodNo ratings yet
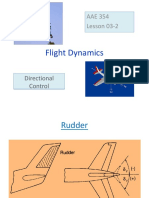
- Lec 03-2 - Directional ControlDocument17 pagesLec 03-2 - Directional ControlArslan MehmoodNo ratings yet
- Lec 03-3 - Lateral StabilityDocument26 pagesLec 03-3 - Lateral StabilityArslan MehmoodNo ratings yet
- Lec 02-8 - Longitudinal DampingDocument12 pagesLec 02-8 - Longitudinal DampingArslan MehmoodNo ratings yet
- Lec 02-3 - Fuselage ContributionDocument18 pagesLec 02-3 - Fuselage ContributionArslan MehmoodNo ratings yet
- Lec 02-6 - Longitudinal ControlDocument23 pagesLec 02-6 - Longitudinal ControlArslan MehmoodNo ratings yet
- Lec 02-5 - Neutral PointDocument21 pagesLec 02-5 - Neutral PointArslan MehmoodNo ratings yet
- Flight Combat Handbook: Defense Department Tactical ManualDocument29 pagesFlight Combat Handbook: Defense Department Tactical ManualImaginary_star100% (2)
- Cheat Sheet Test #1Document1 pageCheat Sheet Test #1Tyler LogginsNo ratings yet
- 1ST Year CH # 2 T-1Document2 pages1ST Year CH # 2 T-1Amir HabibNo ratings yet
- Interference of Light JuruDocument85 pagesInterference of Light JuruBalu Aryen SujjanNo ratings yet
- Simplified Expression of Hydrodynamic Pressure On Deepwater Cylindrical Bridge Piers During EarthquakesDocument20 pagesSimplified Expression of Hydrodynamic Pressure On Deepwater Cylindrical Bridge Piers During EarthquakesParth TrivediNo ratings yet
- Work Energy PowerDocument68 pagesWork Energy PowerSky Drive100% (1)
- Fluid Dynamics ApplicationDocument88 pagesFluid Dynamics Applicationkyledarbymanalo1437No ratings yet
- Fluent-Intro 15.0 L07 Turbulence PDFDocument48 pagesFluent-Intro 15.0 L07 Turbulence PDFAnonymous 7BQxlt8cNo ratings yet
- Relative Equilibrium of FluidsDocument2 pagesRelative Equilibrium of FluidsMarlo Aristorenas0% (1)
- Springing Mass Oscillating System (MDocument35 pagesSpringing Mass Oscillating System (Mthathalakshman121407No ratings yet
- @StudyTime - Channel 09 - Work, Energy, Power (TH)Document12 pages@StudyTime - Channel 09 - Work, Energy, Power (TH)Legendary MathematicianNo ratings yet
- Work Energy Power 1Document4 pagesWork Energy Power 1Gaming baseNo ratings yet
- MIKE21 TideTools ScientificDocDocument86 pagesMIKE21 TideTools ScientificDocGustavo VicierraNo ratings yet
- Quickcheck Questions: Motion in One DimensionDocument57 pagesQuickcheck Questions: Motion in One DimensionArda ÇekmeceNo ratings yet
- Wind Tunnel's ManualDocument292 pagesWind Tunnel's ManualrizwanherlNo ratings yet
- Lecture - 9: Fluid Motion: Euler's EquationDocument14 pagesLecture - 9: Fluid Motion: Euler's Equationrohit singhNo ratings yet
- Phys p2Document16 pagesPhys p2Kalana GamageNo ratings yet
- Sin Cos GraphsDocument19 pagesSin Cos GraphsNeal CastilloNo ratings yet
- The Big Misconception (Forces - Physics)Document5 pagesThe Big Misconception (Forces - Physics)Réginald Raymund Jérôme CaturzaNo ratings yet
- Solutions To Physics I C Momentum Problems 1-5Document4 pagesSolutions To Physics I C Momentum Problems 1-5Christine MalibiranNo ratings yet
- Helicopter Aerodynamics From M8Document18 pagesHelicopter Aerodynamics From M8REZA TAJBAKHSHNo ratings yet
- 12 Physics Notes Ch10 Wave OpticsDocument10 pages12 Physics Notes Ch10 Wave OpticsAnuj MeenaNo ratings yet
- Sahaya Matha Matriculation HRDocument3 pagesSahaya Matha Matriculation HRSadha SivamNo ratings yet
- Reference Coordinate Systems For Missile MotionDocument8 pagesReference Coordinate Systems For Missile MotionD.Viswanath100% (1)
- Resonance Lab Report2Document10 pagesResonance Lab Report2Vinay Krishna KodaliNo ratings yet