Professional Documents
Culture Documents
Service Manual Scissor Lift.
Service Manual Scissor Lift.
Uploaded by
AICHACopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Service Manual Scissor Lift.
Service Manual Scissor Lift.
Uploaded by
AICHACopyright:
Available Formats
Standard Hydraulic Drive
Document: Manual, E500 Control System, Hydraulic Drive Title: Manual, E500 Control System, Standard Hydraulic Drive
Operator’s Manual, Standard Hydraulic Drive of
Mobile Elevating Work Platform
E500 Control System
标准版液压型移动高空作业平台
E500电控系统操作手册
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH
CONTROLS. ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS
EXPRESSLY PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE
AGREE IN WRITING.
A SENSATA BRAND PAGE 1 OF 48
Standard Hydraulic Drive
Document: Manual, E500 Control System, Hydraulic Drive Title: Manual, E500 Control System, Standard Hydraulic Drive
TITLE NAME SIGNATURE DATE
(mm/dd/yyyy)
Prepared by Ivy Sun
Checked by Jie Li
Software Engineering Shawn Huang
Hardware Engineering Prince Cheng
Final Approval William Zhou
Modified by Aaron Zhang 2018.05.18
Modified by Aaron Zhang 2018.10.31
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH
CONTROLS. ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS
EXPRESSLY PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE
AGREE IN WRITING.
A SENSATA BRAND PAGE 2 OF 48
Standard Hydraulic Drive
Document: Manual, E500 Control System, Hydraulic Drive Title: Manual, E500 Control System, Standard Hydraulic Drive
Rev. ER/ECN DESCRIPTION OF CHANGE DATE
(mm/dd/yyyy)
A Initial Release
B Suitable for Sample C of ECU 2018.05.18
Suitable for Sample C of ECU, and update the software
C 2018.10.31
parameters setting
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH
CONTROLS. ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS
EXPRESSLY PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE
AGREE IN WRITING.
A SENSATA BRAND PAGE 3 OF 48
TABLE OF CONTENTS
1. BASIC OPERATION 基础操作 ..................................................................................8
1.1. Main Power and Safety 主电源和安全 ................................................................ 8
1.2. Lifting and Lifting Safety 起升和起升安全 ......................................................... 8
1.3. Driving and Driving Safety 行驶和行驶安全...................................................... 9
1.4. Steering and Steering Safety 转向和转向安全 ............................................... 10
1.5. Miscellaneous Operations 混合操作 ............................................................... 10
1.6. Low Power Operation 低电量操作 .................................................................... 10
2. PLATFORM CONTROL UNIT (PCU) AND ELECTRONIC CONTROL UNIT(ECU)平
台控制单元(PCU)和电子控制单元(ECU) ........................................................12
2.1. Platform Control Unit (PCU) 平台控制单元 ..................................................... 12
2.2. Electronic Control Unit (ECU) 电子控制单元.................................................. 13
3. USER ADJUSTMENTS AND LIFT SET UP 用户调节和机器设定 ..............................17
3.1. Configuration Adjustment 配置调整 ................................................................ 18
3.2. Machine Options State 机器模式选择状态 .................................................... 21
3.3. Load Sensing Operation and Calibration 重量传感器操作和标定 ............. 33
3.4. Set OL Descent Delay 设置超载下降高度 ........................................................ 35
3.5. Fault History State 历史错误状态 ...................................................................... 36
3.6. Software update 程序升级 .................................................................................. 37
4. FAULT STATE 错误状态 ..........................................................................................38
5. NORMAL OPERATING STATE 正常操作状态 ..........................................................43
5.1. Driving Forward or Backward with the Platform Stowed .......................... 43
平台收拢时向前或向后行走............................................................................................... 43
5.2. Raising or Lowering the Platform 升起或下降平台 ....................................... 43
5.3. Operating the Lift with the Platform Elevated .............................................. 45
当平台升起后操作机器....................................................................................................... 45
5.4. Displays on the PCU and ECU in normal operation ................................... 46
操作时的 PCU 和 ECU 显示 ............................................................................................. 46
5.5. Battery Charge State 电池电量 .......................................................................... 46
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 4 OF 48
Table of Figures
Figure 1: Operation Flow Chart 作业流程图 .......................................................................... 11
Figure 2: Platform Control Unit (PCU) 平台控制单元 ........................................................... 12
Figure 3: Joystick Control Buttons 手柄控制按钮 .................................................................. 13
Figure 4: Electronic Control Unit (ECU) 电子控制单元 ECU ............................................... 13
Figure 5: User Adjustments and Lift Set Up 用户调节和机器设定...................................... 17
Figure 6: Getting into Configuration 进入配置置菜单 ........................................................... 18
Figure 7: Drive High Speed Adjustment 高速行走速度调节 ................................................ 18
Figure 8: Drive Low Speed Adjustment 低速行走速度调节 ................................................. 19
Figure 9: Drive Speed while elevated 起升时的行驶速度 .................................................... 19
Figure 10: Lift Speed Adjustment 起升速度调节 ................................................................... 20
Figure 11: Steering Speed Adjustment 转向速度调节 .......................................................... 20
Figure 12: Steer Boost Speed Adjustment 转向速度调节.................................................... 21
Figure 13: Option Setting 模式选择 ......................................................................................... 21
Figure 14: Machine Type 车辆类型 ......................................................................................... 22
Figure 15: Load Sensor Option 压力传感器选择 ................................................................... 23
Figure 16: 80% Load Limit Warning 80%载重限定报警 ....................................................... 23
Figure 17: 90% Load Limit Warning 90%载重限定报警 ....................................................... 24
Figure 18: 99% Load Limit Warning 99%载重限定报警 ....................................................... 24
Figure 19: Overload Display 超载显示 .................................................................................... 24
Figure 20: Pressure Sensor Mode 压力传感器模式 ............................................................. 26
Figure 21: Pothole Guards 坑洞保护 ....................................................................................... 26
Figure 22: Descent Delay 防夹手 ............................................................................................ 27
Figure 23: Motion Alarm 动作报警 ........................................................................................... 28
Figure 24: Load Sensing 超载功能 .......................................................................................... 29
Figure 25: High Torque 高速阀 ................................................................................................ 30
Figure 26: Battery Drain Alarm 电池耗尽报警........................................................................ 31
Figure 27: Changing the Battery Drain Alarm Time 改变电池耗尽报警的延迟时间 ......... 32
Figure 28: Changing the Battery Drain Shut Time 改变电池耗尽关机的延迟时间 ........... 32
Figure 29: No-Load Calibration Function 空载标定功能 ...................................................... 34
Figure 30: Full-Load Calibration Function 满载标定功能 ..................................................... 35
Figure 31: Set Up for Platform Height Descent Limit 设置下降限制的平台高度 .............. 36
Figure 32: Check Fault History 查看历史故障........................................................................ 37
Figure 33: ECU software update tool ECU 软件更新工具 ................................................... 37
Figure 34: PCU software update tool PCU 软件更新工具 ................................................... 38
Figure 35:Turn the Key Switch to Chassis Position 钥匙开关打在底盘控制位置 .......... 44
Figure 36:Chassis Toggle Switch 底盘拨动开关 .................Error! Bookmark not defined.
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 5 OF 48
Figure 37: Lower or Raise Platform from ECU 从 ECU 控制起升和下降 .......................... 44
Figure 38: Motor Hour and the Software Revision 马达运行时间和软件版本 ................... 45
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 6 OF 48
Table of Tables
Table 1: 35 pin definition 35 pin 针脚定义 .............................................................................. 14
Table 2: 14 pin definition 14 pin 针脚定义 ............................................................................ 15
Table 3: List of Fault Codes 错误代码 .................................................................................. 38
Table 4: Troubleshooting Guide 解决办法指导 ................................................................... 40
Table 5: Displays on the PCU and ECU PCU 和 ECU 的显示 ......................................... 46
Table 6: Battery Status Indicator Bars 电池状态指示 ........................................................... 47
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 7 OF 48
1. Basic Operation 基础操作
For the following discussions:
以下的论述:
See Figures 2, 3 for Platform Control Unit (PCU)
上控装置(PCU)见图表 2 、图表 3
See Figure 4 for Electronic Control Unit (ECU)
电控装置(ECU)见图表 4
See Figure 35, 36 and 37 for Key Switch and Chassis controls
钥匙开关和底盘操作见图表 35、36 和 37
1.1. Main Power and Safety 主电源和安全
a) The Key Switch supplies power to the Emergency Stop (E-Stop) and selection of
Chassis ground control or Platform control. The power is off in the center position
and removal of the key in any one of the three positions will maintain the lift in
that mode of operation.
钥匙开关提供电源到急停,并可选择底盘操作或平台操作。中间位置时电源关闭,钥
匙打到三个位置中任一相应位置将保持设备在所选择的模式下。
b) The E-Stop buttons are located on both the chassis and platform controllers.
They are in series and must be pulled out for normal operation. Pressing either
switch turns off power to the chassis and platform. Safety is based on a
completed circuit and pushing in either E-Stop will open the circuit.
底盘操作及平台控制上均装有急停按钮,它们是串联关系,在正常工作时必须完全拔
出。按下底盘或平台上任一个急停将切断电源。安全是建立在一个完整的回路上,按
下任一急停将电路断开。
c) The Enable Button on the Joystick must be engaged to enable the drive, steer,
lift or lower functions.
手柄上的使能开关必须按下才能操作行走、转向、起升或下降功能。
1.2. Lifting and Lifting Safety 起升和起升安全
a) The chassis tilt sensor indicates the chassis is either level or not.
底盘上的倾角传感器指示底盘是否水平。
b) The platform will not rise above a preset height unless the pothole guards are
deployed.
在坑洞保护展开前,平台不会上升至下到位开关高度以上。
c) The measured load must not exceed the ratings assigned to the model of the
machine.
测量的载重一定不能超过该型号机器的额定载重
d) Raising or lowering the platform can be accomplished from three positions:
two at the Chassis and one from the Platform. The Key Switch selects which
control position.
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 8 OF 48
i. The Chassis position allows only up and down movement of the platform, and
can be control by ECU or toggle switch.
ii. The Platform position needs the operator on the platform to select the Lift Mode.
The direction and raise speed are controlled by moving the Joystick forward to
raise the platform and backward to lower the platform.
升起或下降平台可以从三个位置操作:2 个在底盘上,1 个在平台上。钥匙开关选
择在对应位置控制。
i. 在底盘位置只允许上升或下降平台,可通过 ECU 或拨动开关控制。
ii. 在平台位置需要平台上的操作者选择起升模式,方向和起升速度由移动手柄
控制,向前上升平台,向后下降平台。
e) When lower the platform, the motion will delay 3 seconds.
控制下降时,机器动作会有 3 秒延迟。
f) The Platform Control Unit (PCU) will sound an alarm and inhibit operation or only
allows lower if the platform is overloaded
如果平台超载, 平台控制单元(PCU)将发出声音报警并且禁止操作或只允许下降。
g) There is an option for stopping the platform for a safe descent after halt during
lowering if the Descent Delay Machine Option was selected during set up.
当选择防夹手功能,机器会在下降过程中停下平台,以便检查是否有安全问题。
h) Failure of the elevating or lowering valves are reported as a fault code on the
LED readout of the PCU displays ,a fault code and fault description on ECU LCD
displays.
起升或下降阀有故障时,PCU 的 LED 上会显示错误代码,同时 ECU 的 LCD 上也会
显示错误代码并带有故障描述。
1.3. Driving and Driving Safety 行驶和行驶安全
a) Driving is controlled only by the Joystick on the PCU when the Key Switch is set
to the Platform position. See Figure 25.
行驶只能被 PCU 上的手柄控制,并且钥匙开关要打在平台控制位置。见图表 25。
b) The Drive Mode must be selected and the Enable button on the Joystick
engaged.
i. Forward and reverse directions and speed are controlled by moving the handle
forward or backward.
ii. “High Speed” or “Low Speed” can be selected while the platform is stowed, but
when the platform is elevated (and the pothole guards are down) the lift will only
operate in the “Elevated Speed”.
iii. Motion is inhibited or only allow lower if platform loads are in excess of machine
specifications.
iv. Brakes are applied when there is no operation.
行驶模式必须被选择,并且手柄上的使能开关必须按下。
i. 通过移动手柄向前向后控制方向和速度
ii. 当平台收拢,“高速”或“低速”可以被选择,但是当平台被升起(并且坑洞保护被放
下),机器只能操作在“升起速度”
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 9 OF 48
iii. 如果负载超过额定值,动作将被禁止或只允许下降
iv. 在没有任何操作的情况下,刹车会工作
1.4. Steering and Steering Safety 转向和转向安全
a) The Key Switch must be in the platform position. See Figure 25
钥匙开关必须被选择在平台位置。见图 25
b) Steering is controlled only by the buttons on the Joystick of the PCU.
转向只能被 PCU 上的手柄顶部的按钮控制。
c) The Drive Mode must be selected and the Enable button on the Joystick
engaged. 必须选择行走模式,并且使能开关要按下。
1.5. Miscellaneous Operations 混合操作
a) The Hour Meter on the chassis runs when lift or drive functions are enabled.
当起升或行走时,底盘上的计时表会走。
b) The 2-character LED display on the PCU indicates the battery status, error
conditions. PCU 上的两位 LED 显示电池状态,错误代码。
1.6. Low Power Operation 低电量操作
a) Battery power status is determined by operator settings of the battery levels and
is displayed as battery bars on the PCU display, see Table 6: Battery Status
Indicator Bars. 电池电量状态由操作者设置电池水平,并在 PCU 上显示电池条。见表
格 6:电池监测
b) Two or more battery bars allow normal driving.
两格或以上电量条允许正常行驶。
c) At one battery bar travel speed is reduced.
只有一格电量条时,行走速度将自动转为慢速
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 10 OF 48
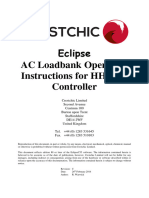
a) Use Chassis Toggle
Power Off Power ON 通电 Switch to Raise or
断电 With Key Switch in
Lower the Platform.用底
Chassis position.钥匙
开关打向底盘 盘拨动开关起升或降下
平台
b) Use ENABLE and UP
Power ON 通电 or DOWN to raise or lower
With Key Switch in Platform the platform on ECU.用
position.钥匙开关打向平台 ECU 上的使能键和上键
或下键控制起升和下降
Select Drive, then
Power ON 通电 Select Slow Speed
With Key Switch in if needed.选择行驶,如需
Chassis position, and 要然后可选慢速
long press ENTER
Button for 5 seconds to
get in maintenance Engage Enable on
menu.钥匙开关指向底 Joystick and Move
盘,长按确认键 5 秒进 Joystick Forward or
入配置菜单。 Reverse for speed. 按
下使能开关,速度改变
通过向前/后移动手柄
Select Lift.
User Adjustments
选择起升
and Lift Set Up 用
户调节和机器设置
See Section 3 Halt For:暂停
Engage Enable on Joystick Tilt (Display LL)倾角
and Move Joystick (显示 LL)
Overload (OL)超载
Forward (Raise) or
(OL)
Reverse (Lower). 按下使能 Other Faults (See Table
Power ON 通电 开关,手柄向前移动(起 3).其他错误(表格 3)
With Key Switch in 升),向后(下降)
Chassis position and
Toggle Switch in the
Down position.钥匙开关
打向底盘,拨动开关打 Brakes are released for
向下 manually moving the lift.
Drive and Lift are disabled.
Power Off 断电
刹车工作,可手动移动机
器,不能起升和行驶
Figure 1: Operation Flow Chart 作业流程图
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 11 OF 48
2. Platform Control Unit (PCU) and Electronic Control Unit(ECU)平
台控制单元(PCU)和电子控制单元(ECU)
2.1. Platform Control Unit (PCU) 平台控制单元
LED
Display
显示
Lift Mode Drive
起升模式 Mode 行驶
模式
Horn
喇叭 Low Speed
低速模式
Figure 2: Platform Control Unit (PCU) 平台控制单元
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 12 OF 48
E-Stop Reverse…Forward Left Turn
急停 向后---------向前 左转
Right
Turn 右转
Enable
使能键
Figure 3: Joystick Control Buttons 手柄控制按钮
2.2. Electronic Control Unit (ECU) 电子控制单元
Display Page down
显示 下翻
Enter
Return
确认
返回
Page up Raise
上翻 上升
Down
Enable 下降
使能
Figure 4: Electronic Control Unit (ECU) 电子控制单元 ECU
ECU provides a 35 pin connector or an optional 14 pin connector for customer selection.
ECU 提供一个 35pin 接口和一个备选的 14pin 接口供用户使用。
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 13 OF 48
Table 1: 35 pin definition 35 pin 针脚定义
Pin 引 Input 输入
Function 功能 Character 特性
脚 /Output 输出
1 Input 输入 Reserved 保留 24VDC
2 Input 输入 Reserved 保留 24VDC
3 Output 输出 LED Control LED 控制 24VDC/2.5A
Drive Valve Power
4 Power 电源 24VDC/7A
阀驱动电源
Drive Valve Power
5 Power 电源 24VDC/7A
阀驱动电源
Raise Valve Control
6 Output 输出 24VDC/2.5A
上升阀控制
Forward Valve Control
7 Output 输出 24VDC/2.5A
前进阀控制
MC Enable
8 Output 输出 24VDC/2.5A
电机控制器使能
MC Speed Control
9 Output 输出 0-5VDC/10mA
电机速度控制
10 Input 输入 Reserved 保留 24VDC
11 Input 输入 Reserved 保留 0-5VDC
12 Input 输入 Reserved 保留 24VDC
Communication PCU Communication CAN Level
13
通信 PCU 通信+ CAN 电平
Chassis Key Switch 24VDC:上控
14 Input 输入
底盘钥匙开关 0VDC:下控
15 Power 电源 Ground 工作电源地 0VDC/2A
Angle Sensor
16 Input 输入 0-5VDC
角度传感器
17 Input 输入 Reserved 保留 0-5VDC
Down Valve Control
18 Output 输出 24VDC/2.5A
下降阀控制
Steer Left Valve Control
19 Output 输出 24VDC/2.5A
左转阀控制
20 Output 输出 Horn Control 喇叭控制 24VDC/2.5A
Buzzer Control
21 Output 输出 0VDC/1A
蜂鸣器控制
Pothole Switch 24VDC:Pothole On 坑洞打开
22 Input 输入
坑洞开关 0VDC:Pothole Close 坑洞收起
24VDC:Lower Than Up Limit
Up Limit Switch
23 Input 输入 低于上限位
上限位开关
0VDC:Higher Than Up Limit
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 14 OF 48
高于上限位
Communication CAN Level
24 PCU 通信-
通信 CAN 电平
25 Power 电源 Power 工作电源 24VDC/2A
26 Input 输入 Reserved 保留 0-5VDC
27 Output 输出 Reserved 保留 0-5VDC/10mA
28 Input 输入 Reserved 保留 5VDC
Reverse Valve Control
29 Output 输出 24VDC/2.5A
后退阀控制
Steer Right Valve Control
30 Output 输出 24VDC/2.5A
右转阀控制
Parallel Valve Control
31 Output 输出 24VDC/2.5A
并联阀控制
32 Output 输出 Reserved 保留 24VDC/2.5A
33 Input 输入 Reserved 保留 24VDC
Tilt Switch 24VDC:Level 水平
34 Input 输入
倾角开关 0VDC:Tilt 倾斜
24VDC:Lower Than Down
Limit
Down Limit Switch 24VDC:低于下限位
35 Input 输入
下限位开关 0VDC:Higher Than Down
Limit
0VDC:高于下限位
Table 2: 14 pin definition 14 pin 针脚定义
Pin Input 输入/Output
Function 功能 Character 特性
引脚 输出
1 Output 输出 Reserved 保留 24VDC/2.5A
2 Input 输入 Reserved 保留 0-5VDC
3 Output 输出 Reserved 保留 5VDC
Communication CAN level
4 CAN H
通信 CAN 电平
Communication CAN level
5 CAN L
通信 CAN 电平
6 Input 输入 Reserved 保留 4-20mA
7 Input 输入 Reserved 保留 4-20mA
8 Output 输出 Reserved 保留 24VDC/2.5A
9 Output 输出 Reserved 保留 24VDC/2.5A
10 Output 输出 Reserved 保留 0-5VDC/10mA
11 Input 输入 Reserved 保留 24VDC
12 Input 输入 Reserved 保留 24VDC
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 15 OF 48
13 Input 输入 Reserved 保留 24VDC
14 Output 输出 Reserved 保留 24VDC/2.5A
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 16 OF 48
3. User Adjustments and Lift Set Up 用户调节和机器设定
Keep pressing the
“ENTER” on ECU
panel for 5 second,
then power on the
ECU
Speed
速度配置 Option Overload Fault
Calibration
模式配置 Descent History Link Host
标定
过载高度 历史错误 PC
连接 PC
Adjust Drive High Machine Type
Speed 车辆类型
调整高速行驶速度 Load Sensor
最大值 Mode
Adjust Drive Low 称重类型
Speed Pressure Sensor No Load Overload View History Upgrade
压力传感器类型 Calibration Descent Fault 1~10 ECU
调整低速行驶速度
空载标定 设置超载下 查看历史错 ECU 连接
最大值 Pothole Guard
Adjust Drive 坑洞保护使能? 降高度 误 1~10 PC
Elevated Speed Descent Delay Full Load
防夹手? Calibration Clear Fault Upgrade
调整起升时行驶速
满载标定 History PCU
度最大值 Motion Alarm
清除历史错 PCU 连接
Adjust Lift Speed 运动告警?
误 PC
调整起升速度最大 Load Sensing
值 称重功能开启?
Adjust Steering High Torque
Speed 高速开启?
调整转向速度最大 Batt Drain Alarm
值 电池休眠告警
Adjust Steer Boost Change Alarm
调整行走转向最大 delay
值 改变报警延迟
Change Lift Shut-
Off delay
改变关机延迟
Figure 5: User Adjustments and Lift Set Up 用户调节和机器设定
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 17 OF 48
3.1. Configuration Adjustment 配置调整
The control allows adjusting high and low speed drive values. The Drive Speed for
normal and elevated drive can be changed on the ECU panel.
系统允许调节高速和低速行驶速度。通过 ECU,可对正常和举升后行走速度进行调节。
The values can be adjust only by “Up” and “Down” on ECU panel.
数值只能通过 EC 面板上的向上和向下按键进行调节。
Ensure the Platform position E-Stop is active (out). See Figure 25.
保证平台上的急停被拔出。请参考图 25。
Keep pressing the “ENTER” of ECU for 5 seconds, and then toggle key switch to
chassis to log in, and the LCD will display submenu of “calibration”.
长按 ECU 面板的“确认”按键 5 秒,进入机器操作模式,显示标定子菜单。
Press button “ENTER” to enter into the
parameter setting.
按下确认键进入参数配置。
Figure 6: Getting into Configuration 进入配置置菜单
3.1.1. Drive High Speed 高速行走
Use button UP or DOWN to find Max Fast
Speed under Speed submenu.
在速度菜单下找到最高行走速度菜单
Press ENTER button.
按下确认按键
Values will be display on LCD.
数值显示在 LCD 上
The value can be changed from 00 to 100
with the button UP (increase) or DOWN
(decrease) on ECU.
该值可以使用 ECU 上键(增加)或下
键(减少)调节,从 00 到 100。
Figure 7: Drive High Speed Adjustment 高速行走速度调节
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 18 OF 48
3.1.2. Drive Low Speed 低速行走
Use button UP or DOWN to find Max Slow
Speed under Speed submenu.
在速度菜单下找到最低行走速度菜单
Press ENTER button.
按下确认按键
Values will be display on LCD.
数值显示在 LCD 上
The value can be changed from 00 to 100
with the button UP (increase) or DOWN
(decrease) on ECU.
该值可以使用 ECU 上键(增加)或下
键(减少)调节,从 00 到 100。
Figure 8: Drive Low Speed Adjustment 低速行走速度调节
3.1.3. Drive Elevated Speed 起升时行驶速度
Use button UP or DOWN to find Max
Raised Speed under Speed submenu.
在速度菜单下找到最低行走速度菜单
Press ENTER button.
按下确认按键
Values will be display on LCD.
数值显示在 LCD 上
The value can be changed from 00 to 75 with
the button UP (increase) or DOWN
(decrease) on ECU.
该值可以使用 ECU 上键(增加)或下
键(减少)调节,从 00 到 75。
Figure 9: Drive Speed while elevated 起升时的行驶速度
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 19 OF 48
3.1.4. Lift Speed 起升速度
Use button UP or DOWN to find Max Lift
Speed under Speed menu.
在配置菜单下找到最大起升速度菜单
Press ENTER button.
按下确认按键
Values will be display on LCD.
数值显示在 LCD 上
The value can be changed from 00 to 100
with the button UP (increase) or DOWN
(decrease) on ECU.
该值可以使用 ECU 上键(增加)或下
键(减少)调节从 00 到 100。
Figure 10: Lift Speed Adjustment 起升速度调节
3.1.5. Steering Speed 转向速度
Use button UP or DOWN to find Max
Steer Speed under Speed menu.
在配置菜单下找到最大转向速度菜
单
Press ENTER button.
按下确认按键
Values will be display on LCD.
数值显示在 LCD 上
The value can be changed from 00 to 100
with the button UP (increase) or DOWN
(decrease) on ECU.
该值可以使用 ECU 上键(增加)或
下键(减少)调节,从 00 到 80。
Figure 11: Steering Speed Adjustment 转向速度调节
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 20 OF 48
3.1.6. Steer Boost 行走转向速度
Use button UP or DOWN to find Steer
Boost under Speed menu.
在配置菜单下找到行走转向速度菜
单
Press ENTER button.
按下确认按键
Values will be display on LCD.
数值显示在 LCD 上
The value can be changed from 00 to 100
with the button UP (increase) or DOWN
(decrease) on ECU.
该值可以使用 ECU 上键(增加)或
下键(减少)调节,从 00 到 50。
Figure 12: Steer Boost Speed Adjustment 转向速度调节
3.2. Machine Options State 机器模式选择状态
Among the options listed below are the special options that can be enable or disable.
Some configure mechanical options of the lift itself and others are used set up how the
lift functions (firmware options).
在下面的模式列表中,这些特定的模式可以被激活或关闭。根据机器的机械安装和要求,
可以设定机器的功能。
Press RETURN to 1. Set Speed, and press
“DOWN” to 2. Set Option.
点击 BACK 回到 1.Set Speed,然后点击
DOWN 切换到 2.Set Option。
Press ENTER to start option setting.
点击 ENTER 开始模式设定。
Figure 13: Option Setting 模式选择
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 21 OF 48
3.2.1. Machine Type 车辆类型
Now the machine type is Hydraulic Lift, and if there are more types, they will be filled in
here.
目前只有车辆类型——液压驱动型,若以后有更多类型的车辆,可以添加到此处。
Press ENTER button to choose machine type.
按下 ENTER 按键去选择车辆类型。
Press UP or DOWN to switch Hydraulic Lift or
other types.
按上键或下键切换液压型车辆还是其他类
型。
Press ENTER to save current option, press
RETURN to give up.按下确认键保存设置,
按下返回键放弃更改
Figure 14: Machine Type 车辆类型
3.2.2. Load Sensor Mode 压力传感器模式
This mechanical option selects one of two ways to determine if the platform is
overloaded.
这个模式是选择一种方法去鉴定平台是否超载。
Find Load Sensor Mode under Option menu.
在配置菜单下找到压力传感器模式
Press ENTER button.
按下确认键
Press UP or DOWN to switch Transducer and
Switch.
按上键或下键切换传感器和开关
Press ENTER to save current option, press
RETURN to give up.
按下确认键保存设置,按下返回键放弃
更改
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 22 OF 48
Figure 15: Load Sensor Option 压力传感器选择
• Pressure switch and angle sensor
This will signal that the platform is overload by an active high signal to the ECU from a
pressure switch.
压力开关和角度传感器:一个被激活的高电平信号从压力开关发出,将告诉ECU 平台的负载
已经超过它的压力限定
• Pressure transducer and angle sensor.
This allows the ECU to do a more detailed sensing of the platform load by reading the
cylinder pressure and scissors angle and is able to notify the operator when the load is
greater than 80%, 90%, or 99% of maximum.
压力传感器和角度传感器:通过读取压力传感器和角度开关的信息,ECU对负载信息的处理
更详细,并且当负载已达80%、90%和最大的99%时都会通知操作人员。
Overload Operation 超载操作
Figure 16: 80% Load Limit Warning 80%载重限定报警
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 23 OF 48
The first indication of the Platform reaching its weight capacity will be at 80% of
overload. “80” will be displayed on the PCU and LCD on the chassis will display fault
code and name to indicate to ground personnel that the load is nearing the machine’s
limit.
这图指出平台达到了它的额定载重的80%。 “80”会被显示在PCU 上。底盘上的超载的LCD
屏会显示错误代码和名称。这等于告诉人们载重已经接近机器限定。
Figure 17: 90% Load Limit Warning 90%载重限定报警
At 90% of overload the alarm will sound and “90” is displayed. The LCD on the chassis
will display fault code and name.如果平台载重达到90%额定载重,“90”会显示,报警声会
继续发出。底盘上的超载的LCD 屏会显示错误代码和名称。
Figure 18: 99% Load Limit Warning 99%载重限定报警
At 90% of overload the alarm will sound and “99” is displayed. The LCD on the chassis
will display fault code and name.如果平台载重达到99%额定载重,“99”会显示,报警声会
继续发出。底盘上的超载的LCD 屏会显示错误代码和名称。
Figure 19: Overload Display 超载显示
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 24 OF 48
If the Platform has been loaded above capacity Overload “OL” will appear and the
PCU’s alarm will begin to sound along with the classis’s alarm, both at a faster rate. The
lift may be lowered ONLY by manual means unless the Platform is below the “Platform
Height Descent Limit” or the load is reduced to a level where the alarm stops sounding.
如果平台被放上超过额定载重,超载(OL)会显示,报警声音的频率会增加。如果平台高度
在“超载下降高度”之上,机器将被禁止动作,除非载重被减少到一个报警声停止的水平。如果
平台在“超载下降高度”位置以下,平台只允许下降。
Warning: All recommended safety procedures should be followed to remove an
overload condition. 警告:所有的推荐的安全步骤应该被遵守以移除这个超载状态。
3.2.3. Pressure Sensor Mode 压力传感器类型
Two pressure sensor mode can be chosen, one is voltage type and the other is current
type.
目前有两种压力传感器类型可以选择,一种是电压型压力传感器,另外一种是电流型压力
传感器。
Press ENTER button to choose pressure sensor
mode.
按下 ENTER 按键去选择压力传感器类型。
Press UP or DOWN to voltage type and current
type.
按上键或下键切换电压型还是电流型。
Press ENTER to save current option, press
RETURN to give up.按下确认键保存设置,
按下返回键放弃更改
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 25 OF 48
Figure 20: Pressure Sensor Mode 压力传感器模式
3.2.4. Pothole Guards 坑洞保护
If this firmware option has been selected,the pothole leaf will open when platform is
higher than designated height for protection.
如果坑洞模式被选择,当机器达到特定高度,坑洞保护挡板将打开保护机器。
Find Pothole Guard under Option menu.
在配置菜单下找到坑洞保护
Press ENTER button to show ENABLE or
DISABLE
按下确认键,将显示该模式是激活或关闭的状
态
Press UP or DOWN to switch ENABLE or
DISABLE
按上下键切换状态
Press ENTER to save 按确认键保存
Figure 21: Pothole Guards 坑洞保护
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 26 OF 48
3.2.5. Descent Delay 防夹手
If this firmware option has been selected and the platform is descending it will stop at a
safety check point to give the operator or bystanders time to remove obstructions from
between the scissors. The Joystick enable must be disengaged and then re-engaged
(or the Chassis Toggle switch must be released and returned to the down position) and
then a short delay must time out before the platform will continue to descend.
如果这模式被选择,当平台下降时它会在一个安全检查点停下,以使给操作者或旁边的人时
间移除剪叉中的障碍物。手柄上的使能开关必须放掉然后重新按下(或者底盘拨动开关必须
回到中位然后在打到下降位置),在一个短暂的延时之后平台才能继续下降。
Find Descent Delay under Option menu.
在配置菜单下找到防夹手模式
Press ENTER button to show ENABLE or
DISABLE
按下确认键,将显示该模式是激活或关
闭的状态
Press UP or DOWN to switch ENABLE
or DISABLE
按上下键切换状态
Press ENTER to save 按确认键保存
Figure 22: Descent Delay 防夹手
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 27 OF 48
3.2.6. Motion Alarm 动作报警
If this firmware option is selected, the option will enable an alarm which will then sound
anytime the lift is being driven or the platform is being elevated or lowered.
如果这个模式被选中,那么报警功能将会被激活。只要机器动作,不管是行走还是上升下
降,都会有报警声发出。
Find Motion Alarm under Option menu.
在配置菜单下找到动作报警
Press ENTER button to show ENABLE
or DISABLE
按下确定键,将显示该模式是激活或关
闭的状态
Press UP or DOWN to switch
ENABLE or DISABLE
按上下键切换状态
Press ENTER to save 按确认键保存
Figure 23: Motion Alarm 动作报警
3.2.7. Load Sensing 超载功能
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 28 OF 48
If this firmware option is selected, the lift will expect that either a pressure switch or
pressure transducer is installed in the scissors lift and lift will notify the operator if an
overload condition exists on the platform.如果这个模式被选择,那么机器上需要安装压力
开关或者压力传感器。并且ECU 会检测机器是否超载。
Find Load Sensing under Option menu.
在配置菜单下找到超载功能。
Press ENTER button to show ENABLE or
DISABLE
按下确定键,将显示该模式是激活或关闭的
状态
Press UP or DOWN to switch ENABLE or
DISABLE
按上下键切换状态
Press ENTER to save 按确认键保存
Figure 24: Load Sensing 超载功能
3.2.8. High Torque 高速阀
Through valve on or off to start high torque or low torque.
通过选择开启高速阀或者关闭,来匹配系统中的默认接的是高速阀还是低速阀。
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 29 OF 48
Find High Torque under Option menu.
在配置菜单下找到高速阀模式。
Press ENTER button to show Valve ON or
OFF.
按下确定键,将显示该模式是激活或关
闭的状态。
Press UP or DOWN to switch
ENABLE or DISABLE.
按上下键切换状态。
Press ENTER to save.
按确认键保存。
Figure 25: High Torque 高速阀
3.2.9. Battery Drain Alarm 电池耗尽报警
If this firmware option is selected, the option will enable an alarm which will sound
anytime if the battery is low.
如果这个模式被选中,那么报警的功能将被激活。如果电池电量低,就会有报警声发出。
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 30 OF 48
Find Battery Drain Alarm under Option
menu.
在配置菜单下找到动作报警
Press ENTER button to show ENABLE or
DISABLE
按下确定键,将显示该模式是激活或关
闭的状态
Press UP or DOWN to switch ENABLE
or DISABLE
按上下键切换状态
Press ENTER to save 按确认键保存
Figure 26: Battery Drain Alarm 电池耗尽报警
3.2.10.Change Drain Alarm Time 改变报警延时
Find Drain Alarm Delay under
Option menu.
在配置菜单下找到电池耗尽报警
Press ENTER button.
按下确认按键
Values will be display on LCD.
数值显示在 LCD 上
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 31 OF 48
The value can be changed from 00
to 60 with the button UP (increase)
or DOWN (decrease) on ECU.
该值可以使用 ECU 上键(增加)或
下键(减少)调节,从 00 到 60。
Figure 27: Changing the Battery Drain Alarm Time 改变电池耗尽报警的延迟时间
3.2.11.Change Drain Shut Time 改变关机延时
Find Drain Shut Delay under
Option menu.
在配置菜单下找到电池耗尽关机
Press ENTER button.
按下确认按键
Values will be display on LCD.
数值显示在 LCD 上
The value can be changed from 00
to 60 with the button UP (increase)
or DOWN (decrease) on ECU.
该值可以使用 ECU 上键(增加)或
下键(减少)调节,从 00 到 60。
Figure 28: Changing the Battery Drain Shut Time 改变电池耗尽关机的延迟时间
Notes:
注意:
The battery drain alarm alerts the user that power is being drawn from the batteries.
电池耗尽报警通知使用者,电池正在被耗尽。
A. After [Alarm Time, in minutes] of no activity-alarm starts beeping. Any activity will
silence the alarm and allow continued operation
A:在【报警时间,单位分钟】后没有动作时,会有嘟嘟报警声。任何动作都会消除报警声并
允许继续操作。
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 32 OF 48
B. After [Shut-Off Time, in minutes] of no activity-System goes into very low power
Sleep mode. Cycle power to restore normal operation.
B: 在【关机时间,单位分钟】后没有任何动作,进入非常低耗的睡眠模式。重启电源会恢复
正常操作。
The system will continue to drain the batteries in the low power mode. The operator or
mechanic should assure that power is turned off and the batteries are put on the
charger at the end of each working shift or day.
系统在低能耗模式也会继续耗尽电池。操作者或技工应该确定电源被关掉,在每次使用后给
电池充电。
Press ENTER button to save modify and return to previous menu, press RETURN
button to give up modify and return to previous menu.
按确认键保存更改并返回上级菜单,按“退出”按键,放弃修改并返回上级子菜单。
The new values will be available as values have been saved.
保存后,新的值将被立即启用。
3.3. Load Sensing Operation and Calibration 重量传感器操作和标定
3.3.1. No Load Calibration 空载标定
No load on platform.
平台无负载
Keep pressing the ENTER button
on ECU for 5 seconds, and then
turn the Key Switch to the Chassis
Control position.
长按确认键 5 秒, 同时将钥匙开关打
到底盘位置。
The LCD will display 1.Speed menu.
And then, press UP or DOWN
button to find 3.Calibration function.
LCD 会显示速度设置菜单,通过上
下键切换选择标定菜单。
Press ENTER button, ECU LED will
display “Execute No Load
Calibration?”. Long press ENTER
button for 5 seconds to execute
automatic calibration, or press
RETURN button to give up
calibration and return back to menu
Calibration.
按下进入键,ECU LED 屏幕将显示
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 33 OF 48
“执行空载标定?”。长按确认键 5 秒
将开始自动标定,或者按退回键放弃
标定并返回标定菜单。
Figure 29: No-Load Calibration Function 空载标定功能
Once the calibration is done, the LED will display the result of calibration (“No Load
Calibration Complete!” or “Pressure Sensor Failure!” or “Angel Sensor Failure!”). Press
RETURN button will be back to menu Calibration.
标定结束后,ECU 的 LED 屏将会显示标定结果(“空载标定完成!”或“压力传感器错
误!”或“角度传感器错误!”)。按下退回键,将返回到标定菜单。
3.3.2. Full Load Calibration 满载标定
Full load on platform.
平台放上额定载荷
Keep pressing the ENTER button
on ECU for 5 seconds, and then
turn the Key Switch to the Chassis
Control position.
长按确认键 5 秒, 同时将钥匙开关打
到底盘位置。
The LCD will display 1.Speed menu.
And then, press UP or DOWN
button to find 3.Calibration function.
LCD 会显示速度设置菜单,通过上
下键切换选择标定菜单。
Press ENTER button, ECU LED will
display “Execute Full Load
Calibration?”. Press UP or DOWN
button to find “Execute Full Load
Calibration?”. Long press ENTER
button for 5 seconds to execute
automatic calibration, or press
RETURN button to give up
calibration and return back to menu
Calibration.
按下进入键,ECU LED 屏幕将显示
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 34 OF 48
“执行满载标定?”,按上键或下键切换
到“执行满载标定”。长按确认键 5 秒
将开始自动满载标定,或者按退回键
放弃标定并返回标定菜单。
Figure 30: Full-Load Calibration Function 满载标定功能
Once the calibration is done, the LED will display the result of calibration (“No Load
Calibration Complete!” or “Pressure Sensor Failure!” or “Angel Sensor Failure!”). Press
RETURN button will be back to menu Calibration.
标定结束后,ECU 的 LED 屏将会显示标定结果(“满载标定完成!”或“压力传感器错
误!”或“角度传感器错误!”)。按下返回键,将返回到标定菜单。
3.4. Set OL Descent Delay 设置超载下降高度
In the case of overload if OL Descent Delay has been selected, it will forbidden all
motion when platform is higher than OL Descent Height; if platform is lower than OL
Descent Height, it only allows lower the platform.
在平台超载的情况下如果选择了超载下降高度模式,如果平台高于这个高度,机器将禁止一
切动作;如果平台低于这个高度,平台将只允许下降。
1. Lower or raise the platform to stowed position using UP or DOWN button on ECU
panel .使用 ECU 面板上的向上或向下开关,将平台下降或升到的特定高度。
2. Long press the bottom “ENTER” of ECU for 5 seconds to log in, and then turn the
Key Switch to chassis control position. The LCD will display submenu of “1.Speed”.
长按 ECU 面板的“确认”按键 5 秒,同时将钥匙开关切换到底盘控制位置,进入速度设置模
式。
3. Press “UP” or “DOWN” to choose “OL Descent Height Machine Inclined”, press
“ENTER” to display configuration submenu list.按上键或下键选择角度菜单,按确认键
进入。
4. Press ENTER button, LCD will display “Save OL Descent Height”.按下确认按钮,
LCD 上将显示“保存超载下降设置高度”?
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 35 OF 48
Long press ENTER button for 5
seconds
长按确认键 5 秒
Current Angle will be set for OL
Descent Height.
当前角度将被设置为超载下降高度。
Figure 31: Set Up for Platform Height Descent Limit 设置下降限制的平台高度
5. Long press ENTER button for 5 seconds will set current angle for OL Descent
Height. After the value be saved, display will be back to Trip Angel menu.长按确认键
5 秒将当前角度设置为超载下降的角度,当数值被保存后,将返回到倾斜角度菜单。
6. When in Trip Angel, long press RETURN button for 5 seconds to return the
controller to normal operation.
长按退回键 5 秒可返回控制器进行正常操作。
3.5. Fault History State 历史错误状态
The control allows the displaying of the last 10 faults.
这个控制允许显示最后的十个错误。
Long press the ENTER button on ECU for 5 seconds, and then turn the Key Switch to
the Chassis Control position, and then the LCD will display “1.Speed” menu.长按确认键
5 秒,同时将将钥匙开关打到底盘位置,此时 LCD 将显示速度设置菜单。
Press UP or DOWN button to find menu “5.Fault History”, press ENTER button to
display fault history 1. Press UP or DOWN button to switch fault history 1~10.按上键或
者下键切换到历史错误菜单,按确认键查看历史错误 1,按上键或下键可切换历史错误
1~10.
Long press ENTER button for 5 seconds when display fault history, the LCD will display
“clear fault history?” . Long press ENTER button for 5 seconds to delete all the fault
history or press RETURN button to give up delete and back to menu Fault History.
显示历史错误状态时长按确认键 5 秒,LCD 将显示“清除历史错误”。长按确认键 5 秒将清
除所有历史错误记录,或按退回按键取消删除并返回历史错误菜单。
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 36 OF 48
Long press ENTER button for 5
seconds
长按确认键 5 秒
Enter into the Fault History.
进入查看历史故障信息画面。
Figure 32: Check Fault History 查看历史故障
3.6. Software update 程序升级
Keep pressing the “Enter” button, and toggle the Key Switch to chassis control mode,
and you can see the 1.Set Speed in LCD of ECU panel. And now release the ”Enter”
button, and choose “UP” or “DOWN” button to cut to 6.Link Host PC. And then press
“Enter” button to choose “ECU PC” or “PCU PC”. Finally, connect the USB wire to
computer, and open the firmware “Sensata ECU Assistant” or “Sensata PCU Assistant”
to update the software.
按住 Enter 键,将底盘钥匙开关打到下控,直到 ECU 画面出现 1. Set Speed,此时松开
Enter 键,进入维护操作模式。按“换台”或“飞臂”按键,切换到连接上位机子菜单(“6.
Link Host PC”)。按下 Enter 键,进入连接上位机子菜单,选择”ECU PC”,连接 PC 软
件,选择“PCU PC”,连接 PCU PC 软件。
Figure 33: ECU software update tool ECU 软件更新工具
1. Choose correct com port, and click “Connect” button;
选择正确的串口号,点击连接按键;
2. Read the software information from ECU;
读取 ECU 中选线的软件版本信息;
3. Update the prepared software APP.
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 37 OF 48
更新准备好的 APP 软件。
Figure 34: PCU software update tool PCU 软件更新工具
1. Choose correct com port, and click “Connect” button;
选择正确的串口号,点击连接按键;
2. Read the software information from PCU;
读取 PCU 中选线的软件版本信息;
3. Update the prepared software APP.
更新准备好的 APP 软件
4. Fault State 错误状态
In the fault state, a fault code from the list will be displayed on PCU, and ECU will
display fault code and description.
在错误状态,列表中的一个错误代码会在PCU 并在ECU 上显示代码及描述。
Table 3: List of Fault Codes 错误代码
Display Description 描述 Lift Reaction 机器反应
显示
System initialization Fault Disables All Motion
01
系统初始化错误 停止所有动作
System communication Fault Disables All Motion
02
系统通讯错误 停止所有动作
Invalid option setting Fault Disables All Motion
03
无效选项设置错误 停止所有动作
Calibration Fault Disables All Motion
04
标定失败 停止所有动作
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 38 OF 48
GPS communication Fault Disables All Motion
09
GPS 通讯故障 停止所有动作
Chassis Up or Down Switch ON Disable Chassis Control
12
底盘升降开关故障 禁止下控
Pothole Guard Fault Disable Lifting and Driving
18
坑洞保护错误 停止起升和行走
Pressure Sensor Fault Disables All Motion
31
压力传感器错误 停止所有动作
Angle Sensor Fault Disables All Motion
32
角度传感器错误 停止所有动作
Pressure Sensor II Fault Disables All Motion
35
压力传感器错误 停止所有动作
Battery Drain Alarm Lift Slow to Drive Speed
36
电池电量低告警 限制行走速度
Battery Drain Shutdown Disables All Motion
37
电池耗尽关机 停止所有动作
Platform Left Button ON Diagnostic Message Only
42
左转按键故障 只是报警
Platform Right Button ON Diagnostic Message Only
43
右转按键故障 只是报警
Platform Enable Button ON Disable Platform Control
46
使能按键故障 停止平台操作
Joystick Not In Neutral Lift Slow to Drive Speed
47
启动时手柄不在零位错误 限制行走速度
Forward Coil Fault Disable Lifting and Driving
52
前进阀故障 停止起升和行走
Reverse Coil Fault Disable Lifting and Driving
53
后退阀故障 停止起升和行走
Lift Up Coil Fault Disable Lifting and Driving
54
起升阀故障 停止起升和行走
Lift Down Coil fault Disable Lifting and Driving
55
下降阀故障 停止起升和行走
Right Turn Coil Fault Disable Lifting and Driving
56
右转阀故障 停止起升和行走
Left Turn Coil Fault Disable Lifting and Driving
57
左转阀故障 停止起升和行走
General Brake Coil Fault Disable Lifting and Driving
58
刹车阀故障 停止起升和行走
Low Voltage Fault Disable All Motion
68
低电压故障 停止所有动作
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 39 OF 48
80 Over 80% Load Warning 超过 80%负载报警 Warning Only 只是报警
90 Over 90% Load Warning 超过 90%负载报警 Warning Only 只是报警
99 Over 99% Load Warning 超过 99%负载报警 Warning Only 只是报警
Overloaded Platform Fault Disable All Motion
0L
平台超载故障 停止所有动作
Machine Tiled Disable Lifting and Driving
LL
机器倾斜故障 停止起升和行走
Table 4: Troubleshooting Guide 解决办法指导
Display
Description 描述
显示
System Initialization Fault: ECU may be malfunctioning, replace it.
01
系统初始化错误: ECU 可能出故障了,更换 ECU
System Communication Fault: Check communications cable connections and
other wiring. If that does not resolve the problem, try replacing the PCU or
02
ECU.系统通讯错误:检查通讯线的连接和其他线。如果仍然无法解决问题,尝试
更换 PCU 或者 ECU.
Invalid Option setting Fault: Set appropriate option for this lift.
03
无效选项设置错误:给机器设置适当的选项
Calibration Fault: Re-calibration the system, or check the angle and pressure
04 sensor.
标定失败:请重新标定,或者检查角度传感器和压力传感器是否有问题。
GPS communication Fault: Check communications cable connections and
other wiring. If that does not resolve the problem, try replacing the GPS
09
module or ECU. GPS通讯故障:检查通讯线的连接和其他线。如果仍然无法解决
问题,尝试更换GPS模块 或者ECU.
Chassis Up or Down Fault: Check communications cable connections and
other wiring.If that does not resolve the problem, try replacing the ECU.
12
拨动开关向上向下故障:确定没有东西压住底盘拨动开关或ECU按键,检查底盘拨
动开关的接线。如果仍然无法解决问题,尝试更换ECU
Pothole Guard Fault: Check that the pothole guards are extended, check the
pothole limit switches. Check wires to the switches, check the down limit
18
switch and connections. 坑洞保护错误:检查坑洞保护有没有伸开,检查坑洞保
护限位,检查限位接线,检查下停止限位和接线
Pressure Sensor Fault: Check the wiring to the sensor and then the sensor
itself. Also check to make sure that the correct option is properly selected (or
31
not) for load sensing. 压力传感器错误:检查传感器的接线和传感器。也要检查适
合重量传感器的正确的选项被选择正确
Angle Sensor Fault: Check the wiring to the sensor and then the sensor itself.
32
Also check to make sure that the correct option is properly selected (or not) for
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 40 OF 48
load sensing角度传感器错误:检查传感器接线和传感器。也要检查适合重量传感
器的正确的选项被选择正确
Limp Mode: Battery voltage is low, charge the battery.
36
爬行模式:电量低,请充电
37 Battery Drain Shutdown:Recharge 电池耗尽关机:重新充电
Platform Left Turn Switch ON at power-up Message: Ensure that nothing is
holding the Joystick Toggle Switches down. If OK, consider replacing the
42
Joystick or PCU.启动时向左转向按钮开错误:确定没有东西压住手柄上的按钮。
如果 OK,考虑更换手柄或 PCU。
Platform Right Turn Switch ON at power-up Message: Ensure that nothing is
holding the Joystick Toggle Switches down. If OK, consider replacing the
43 Joystick or PCU. 启动时向右转向按钮开错误:确定没有东西压住手柄上的按钮。
如果OK,考虑更换手柄或PCU。
Platform Joystick Enable Switch ON at power-up Fault: Ensure that nothing is
holding the Enable switch closed. Also check the neutral zone parameters. If
46 OK, consider replacing the Joystick or PCU. 启动时手柄使能开关开错误:确定
没有东西压住手柄上的使能开关,也要检查零位参数。如果OK,考虑更换手柄或
PCU。
Platform Joystick not in neutral at power-up Message: Make sure that the Joystick
is in the neutral (upright) position. Check the neutral zone parameter setting in the
47 LabView Programmer. If it’s OK, consider replacing the Joystick or the PCU. 启动
时手柄不在零位错误:确定手柄在零位(垂直位置)。检查零位参数设置在标准剪
叉程序中。如果OK,考虑更换手柄或PCU。
Forward Coil Fault: Check the connections to the Coil’s terminals and make sure
they are tight. If so, check the coil itself to see if it is open or shorted.
52 前进阀错误:检查线圈的连接,确定它们是正确的。如果是正确的,检查线圈
是否断路或者短路了。
Reverse Coil Fault: Check the connections to the Coil’s terminals and make sure
they are tight. If so, check the coil itself to see if it is open or shorted.
53 后退阀错误:检查线圈的连接,确定它们是正确的。如果是正确的,检查线圈
是否断路或者短路了。
Lift Up Coil Fault: Check the connections to the Coil’s terminals and make
sure they are tight. If so, check the coil itself to see if it is open or shorted.
54
起升阀错误:检查线圈的连接,确定它们是正确的。如果是正确的,检查线圈是否
断路或者短路了。
Lift Down Coil Fault: Check the connections to the Coil’s terminals and make
sure they are tight. If so, check the coil itself to see if it is open or shorted.
55
下降阀错误:检查线圈的连接,确定它们是正确的。如果是正确的,检查线圈是否
断路或者短路了。
56 Right Turn Coil Fault: Check the connections to the Coil’s terminals and make
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 41 OF 48
sure they are tight. If so, check the coil itself to see if it is open or shorted.
向右转向阀错误:检查线圈的连接,确定它们是正确的。如果是正确的,检查线圈
是否断路或者短路了。
Left Turn Coil Fault: Check the connections to the Coil’s terminals and make
sure they are tight. If so, check the coil itself to see if it is open or shorted.
57
向左转向阀错误:检查线圈的连接,确定它们是正确的。如果是正确的,检查线圈
是否断路或者短路了。
General Brake Coil Fault: Check the connections to the Coil’s terminals and
make sure they are tight. If so, check the coil itself to see if it is open or
58
shorted. 刹车阀错误:检查线圈的连接,确定它们是正确的。如果是正确的,检查
线圈是否断路或者短路了。
Low Voltage Fault: Check battery voltage and charge if necessary. Check the
battery connections and tight or clean. Check the voltage to the ECU and PCU.
68 低电压错误:检查电池电压,如果需要的话进行充电。检查电池和开关的连接,
加固或者清洁。检查到 ECU 和 PCU 的电压。
Over 80% Load Warning: Platform is getting close to its limit of weight.
80 Consider not adding more load. 超过 80%负载报警:平台上已经接近它的极限载
重。考虑不要再增加载重。
Over 90% Load Warning: Platform is getting close to its limit of weight.
90 Consider not adding more load. 超过 90%负载报警:平台上已经接近它的极限载
重。考虑不要再增加载重。
Over 99% Load Warning: Platform has reached its limit of weight. Do not add
99 more load. 超过 99%负载报警:平台已经达到它的载重上限。不要再增加任何载
重。
Overloaded Platform Fault: Remove the excess load immediately.
0L
平台超载错误:立即移除超过的载重。
Machine Tilted Beyond Safe Limits Fault: If the machine is tilted, find a way to
make it level. If the machine is level, check the wiring to the tilt sensor and
LL
then the sensor itself. 机器倾斜超过安全限定错误:如果机器倾斜了,想办法让它
水平。如果机器是水平的,检查水平传感器的接线和传感器本身。
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 42 OF 48
5. Normal Operating State 正常操作状态
After setting each of the desired parameters the lift can now be operated as desired.
在设定完每一个需要的参数后,机器可以像期望的那样正常操作了。
5.1. Driving Forward or Backward with the Platform Stowed
平台收拢时向前或向后行走
Place the Key Switch to the platform position and pull out both the Chassis E-Stop
switch and the PCU E-Stop switch. Momentarily press the DRIVE button on the PCU
(see Figure 2 and 3). Pull in the ENABLE switch of the Joystick and then push the
Joystick forward for forward movement and backward for backward movement (see
Figure 3 for switches on the Joystick). The farther the Joystick is pushed in either
direction the faster the lift will move.
把钥匙开关打在平台位置,拉出底盘和PCU 上的急停。按下PCU 上的DRIVE 按钮后(见图
2、3),按住手柄上的使能开关然后推手柄向前就是向前动作,向后就是向后动作(见图
3)。无论向前还是向后,手柄被推的越多,机器移动的越快。
5.2. Raising or Lowering the Platform 升起或下降平台
5.2.1. From the Platform Using the PCU 在平台上用 PCU
With the lift stationary and with the lift in platform mode (see section above) push the
LIFT button on the PCU (see Figures 2 and 3). The platform can now be raised by
pulling back on the Joystick while the ENABLE switch is engaged Pushing forward on
the Joystick with the ENABLE engaged will lower the lift.
机器静止,并在平台操作模式,选择PCU上LIFT MODE(见图2、图3)。按住使能开关向前
推和前后拉手柄,将分别实现平台的升起和下降。
5.2.2. From the Ground Using Chassis Controls 从地面操作使用底盘控制
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 43 OF 48
Platform Position Chassis Position
平台位置 底盘位置
Figure 35:Turn the Key Switch to Chassis Position 钥匙开关打在底盘控制位置
C “CH” is Displayed.
“CH”被显示。
Once in Chassis mode the platform will blink “CH” on its display.
一旦在底盘模式,平台上的显示屏会闪烁”CH”。
There are two options to control up and down on chassis 底盘上的控制起升下降
Press ENABLE and UP/DOWN on ECU to raise/lower the platform.
按下 ECU 上的使能键和上键/下键控制平台起升或下降
Figure 36: Lower or Raise Platform from ECU 从 ECU 控制起升和下降
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 44 OF 48
5.2.3. Software Revision and Motor Hour Displayed
软件版本和马达运行时间显示
The ECU displays the Motor Hour when raising or lowering or steering the platform in
normal operation.
当正常操作起升或降下平台,ECU 会显示马达运行时间。
Turn key switch to chassis
将钥匙开关打到底盘
Press ENTER button on ECU when in Motor Hour, the ECU LCD will display software
revision.
在马达运行时间界面按下 ECU 上的确认键,ECU 的 LCD 将会显示软件版本。
Note:
If errors are present ,ECU will display fault code and description.
如果错误发生,ECU 将显示错误代码和描述。
The Motor Hour will be displayed on
the ECU as the Platform is in normal
option.
当平台正常操作时,马达运行时间将会
在ECU 上显示。
The Software Revision number will
be displayed on the ECU when press
ENTER button under Motor Hour
display.在马达运行时间界面按下确认
键,软件版本号码会在ECU上显示。
Release ENTER will back to Motor
Hour display.
放掉确认键,返回马达运行时间显示
Figure 37: Motor Hour and the Software Revision 马达运行时间和软件版本
5.3. Operating the Lift with the Platform Elevated
当平台升起后操作机器
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 45 OF 48
Driving the lift while the platform is elevated is the same as driving it when the platform
is stowed except that the machine will not allow itself to move as fast. This is for
operator safety reasons. Press the DRIVE button and operate the lift with the Joystick
as before, again the Key Switch will need to be in the platform mode (see sec. 5.1
above).
当平台提升后驱动机器,机器的行驶速度没有平台在下面的行驶速度快。这是为了操作者的安
全考虑。按下DRIVE 按钮和操作手柄,就像之前一样。再次声明,机器需要被打在平台操作
模式(见上面的6.1 章节).
5.4. Displays on the PCU and ECU in normal operation
操作时的 PCU 和 ECU 显示
The following table shows what you can expect to see on the PCU and ECU displays
during normal operation
下面的表格显示正常操作时的 PCU 和 ECU 显示。
Table 5: Displays on the PCU and ECU PCU 和 ECU 的显示
Operating Mode PCU Display ECU Display
操作模式 PCU 显示 ECU 显示
Powered up but not Battery Level Motor Hour
Moving 电池电量 马达运行时间
上电但是没有移动
Driving Forward or Battery Level Motor Hour
Backward 电池电量 马达运行时间
向前或者向后移动
Elevating the Platform Battery Level Motor Hour
升起平台 电池电量 马达运行时间
Lowering the Platform Battery Level Motor Hour
下降平台 电池电量 马达运行时间
Faults in either Platform or Fault Code Fault Code and Name
Chassis Mode 发生故障 故障代码 故障代码和名称
In Chassis Mode Motor Hour
选择底盘模式
CH 马达运行时间
5.5. Battery Charge State 电池电量
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 46 OF 48
In normal operating mode after proper initialization, the battery charge level is presented
on the PCU display in percentage: 10, 20, 30, 50, 70, and 90. At 10% the display
flashes every second.
在适当的设置之后的正常操作模式,电池电量水平被显示在PCU 上,代表百分之10、20、
30、50、70 和90. 在10%的时候显示每秒闪烁一次。
Table 6: Battery Status Indicator Bars 电池状态指示
Platform Battery
Display Percent电池百 Description 描述
平台显示 分比
Battery is fully charged
90-100 电池是满的
percent of battery charge
70
电量剩余百分比
percent of battery charge
50
电量剩余百分比
percent of battery charge
30
电量剩余百分比
Must Charge Battery
20
必须充电
Very low charge.
Two minutes until limited to
10
Drive Slow电量非常低,两分
钟后机器自动进入低速模式
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 47 OF 48
Standard Hydraulic Drive Control System K500-VR1 Rev. C
THIS DOCUMENT CONTAINS INFORMATION PROPRIETARY TO DELTATECH CONTROLS.
ANY REPRODUCTION, DISCLOSURE OR USE OF THIS DOCUMENT IS EXPRESSLY
PROHIBITED EXCEPT AS DELTATECH CONTROLS MAY OTHERWISE AGREE IN WRITING.
A SENSATA BRAND PAGE 48 OF 48
You might also like
- Manual Audi A1-2011Document26 pagesManual Audi A1-2011Center FastNo ratings yet
- Servi Tool CNHDocument108 pagesServi Tool CNHYohao Cahuana Durand83% (6)
- Kinsley David R Tantric Visions of The Divine Feminine 330p PDFDocument330 pagesKinsley David R Tantric Visions of The Divine Feminine 330p PDFvoiddoor94% (18)
- Duogen Technical Documentation PDFDocument29 pagesDuogen Technical Documentation PDFvassindouNo ratings yet
- Introduction to Fly-By-Wire Flight Control SystemsFrom EverandIntroduction to Fly-By-Wire Flight Control SystemsRating: 5 out of 5 stars5/5 (1)
- Titan HMXT 062007Document131 pagesTitan HMXT 062007Jhofran HidalgoNo ratings yet
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosFrom EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosRating: 5 out of 5 stars5/5 (1)
- 520-Um001 - PowerFlex 525 Adjustable Frequency AC Drive User Manual PDFDocument240 pages520-Um001 - PowerFlex 525 Adjustable Frequency AC Drive User Manual PDFThông NguyễnNo ratings yet
- Service Manual Namu X 35 EnglishDocument80 pagesService Manual Namu X 35 EnglishFernando MarinNo ratings yet
- Project Report PDFDocument41 pagesProject Report PDFAKRAMA HASANNo ratings yet
- TK3723+Data+Sheet+v0 23Document89 pagesTK3723+Data+Sheet+v0 23Phong LêNo ratings yet
- Installation ManualDocument60 pagesInstallation ManualmaituanNo ratings yet
- 68k SystemDocument112 pages68k SystemObey O MadzivireNo ratings yet
- XM50000 HMXT Manual (30%KOH)Document109 pagesXM50000 HMXT Manual (30%KOH)zakarianoui35No ratings yet
- OM&MDocument103 pagesOM&MmaituanNo ratings yet
- Hydrogen GeneratorDocument107 pagesHydrogen Generatorarnab sowNo ratings yet
- PowerFlex 527 Adjustable Frequency AC Drive-25C PDFDocument176 pagesPowerFlex 527 Adjustable Frequency AC Drive-25C PDFAníbal LópezNo ratings yet
- Washing Machine-1Document72 pagesWashing Machine-1kaspigarzoNo ratings yet
- DTSC-50 Manual PDFDocument106 pagesDTSC-50 Manual PDFAcosta JohnnyNo ratings yet
- GE Power Conversion. T1679EN Software Manual Rev MV3000e Drive Range. Basic Drive Modules, Air-Cooled & Liquid CooledDocument446 pagesGE Power Conversion. T1679EN Software Manual Rev MV3000e Drive Range. Basic Drive Modules, Air-Cooled & Liquid CooledEvandro PavesiNo ratings yet
- 48 D APS3-3xx Series Installation Guide A4Document112 pages48 D APS3-3xx Series Installation Guide A4Federico FranchinoNo ratings yet
- 3G8F7-CLK12-E3G8F7-CLK52-E3G8F7-CLK21-E Controller Link Support Boards For PCI Bus Installation GuideDocument46 pages3G8F7-CLK12-E3G8F7-CLK52-E3G8F7-CLK21-E Controller Link Support Boards For PCI Bus Installation GuideMD SAIFULNIZAM ABDUL HALIMNo ratings yet
- 1298 ManualDocument136 pages1298 Manualrodrigo aguilarNo ratings yet
- Eclipse HHTCDocument47 pagesEclipse HHTCphcrshiftNo ratings yet
- Access Power Solutions Installation and Operation Guide: (APS6-300/500 and APS12-300 Series)Document120 pagesAccess Power Solutions Installation and Operation Guide: (APS6-300/500 and APS12-300 Series)lors75No ratings yet
- Easygen-3000 Series (Package P1) Genset Control: ConfigurationDocument348 pagesEasygen-3000 Series (Package P1) Genset Control: ConfigurationAndresan507No ratings yet
- 63 C SC100 Handbook A4Document86 pages63 C SC100 Handbook A4Yoko PotifaraNo ratings yet
- Easygen-800: ManualDocument156 pagesEasygen-800: ManualLevi Leonardo Maru SinagaNo ratings yet
- EKCC-W Sequencing Controller 4PEN341705-1 Installation Manuals EnglishDocument16 pagesEKCC-W Sequencing Controller 4PEN341705-1 Installation Manuals EnglishNano SalamNo ratings yet
- SC200 Handbook D2 A4Document109 pagesSC200 Handbook D2 A4Miguel Garcia AriasNo ratings yet
- ViVIX-S Wireless Service Manual - V1.3 - EN PDFDocument148 pagesViVIX-S Wireless Service Manual - V1.3 - EN PDFscribangelofNo ratings yet
- Tech-Tool Release News 2.8.230Document10 pagesTech-Tool Release News 2.8.230Reza AminiNo ratings yet
- Rockwell PowerFlex DC User GuideDocument406 pagesRockwell PowerFlex DC User Guideleonardo_melo_costaNo ratings yet
- Curtis OS30 ManualDocument157 pagesCurtis OS30 ManualPankaj MankarNo ratings yet
- Allen-Bradley 1305 FRN 6.01Document170 pagesAllen-Bradley 1305 FRN 6.01SebNo ratings yet
- Easygen-3000 Series Genset Control: ConfigurationDocument372 pagesEasygen-3000 Series Genset Control: ConfigurationRolando ChanisNo ratings yet
- PowerConnect - 2800 - Release Notes 10045Document6 pagesPowerConnect - 2800 - Release Notes 10045CAANo ratings yet
- SL21700H H023 EngDocument82 pagesSL21700H H023 EngBVB TecnologiaNo ratings yet
- 0001 7051060 004 02 General InformationDocument14 pages0001 7051060 004 02 General InformationMark V FarrellNo ratings yet
- GV3000/SE AC Drive: Hardware Reference, Installation, and Troubleshooting Manual D2-3360-6Document128 pagesGV3000/SE AC Drive: Hardware Reference, Installation, and Troubleshooting Manual D2-3360-6Nguyen Hai DangNo ratings yet
- WoodwardDocument31 pagesWoodwardAceel FitchNo ratings yet
- WebInterface Configuration Manual BasicsDocument32 pagesWebInterface Configuration Manual BasicsprenticNo ratings yet
- CAT ParameterDocument200 pagesCAT ParameterkaleemullahNo ratings yet
- APS Install Guide APS6-300 - 500 and APS12-300 Series - D2 - A4Document124 pagesAPS Install Guide APS6-300 - 500 and APS12-300 Series - D2 - A4Miguel Garcia AriasNo ratings yet
- PowerFlex 520 User ManualDocument244 pagesPowerFlex 520 User ManualValdirei SilvaNo ratings yet
- Powerflex 520-Series Adjustable Frequency Ac Drive: User ManualDocument244 pagesPowerflex 520-Series Adjustable Frequency Ac Drive: User ManualJAlvarez AlvarezNo ratings yet
- 396 3616Y1 Tower Fertilizer System For JDRC 2000 PWM Control Rev. 02.22.201 PDFDocument54 pages396 3616Y1 Tower Fertilizer System For JDRC 2000 PWM Control Rev. 02.22.201 PDFBeny StephenNo ratings yet
- Quantum TechVision PDFDocument78 pagesQuantum TechVision PDFLuis Fernando Garcia SNo ratings yet
- DTSC-200 ATS Controller: OperationDocument33 pagesDTSC-200 ATS Controller: Operationmojsic6313No ratings yet
- Suzuki Marine Precision Control GaugesDocument41 pagesSuzuki Marine Precision Control GaugesJohn PatistasNo ratings yet
- Control Box ManualDocument58 pagesControl Box ManualszerelNo ratings yet
- DTSC-200A ATS Controller: ConfigurationDocument166 pagesDTSC-200A ATS Controller: ConfigurationHendiko PanggabeanNo ratings yet
- Summit Compressor Control Panel: Prepared By: Coll-Tech Ignition SystemsDocument18 pagesSummit Compressor Control Panel: Prepared By: Coll-Tech Ignition SystemssalehNo ratings yet
- C Manual 521 K12Document125 pagesC Manual 521 K12nghiagpvnNo ratings yet
- Compact Controller (OCC100) User Guide For Ovation 3.6.0 and Feature Pack 4 OW360 - 50Document195 pagesCompact Controller (OCC100) User Guide For Ovation 3.6.0 and Feature Pack 4 OW360 - 50Adrian ReyesNo ratings yet
- Magnum Version 8 Manual Rev1.7Document172 pagesMagnum Version 8 Manual Rev1.7shahzad32552372100% (1)
- Vertex RSI 7134 Antenna Control UnitDocument134 pagesVertex RSI 7134 Antenna Control UnitFahed Jalil100% (1)
- 7000 Um150e en P Dec03Document456 pages7000 Um150e en P Dec03Cristian VegaNo ratings yet
- Diesel Engine Control Systems - Application & Installation Guide - Lebw4981Document40 pagesDiesel Engine Control Systems - Application & Installation Guide - Lebw4981libertyplus100% (1)
- 7000 Um202 - en P PDFDocument216 pages7000 Um202 - en P PDFRaul quispe quispeNo ratings yet
- Distributed Process Control ReportFrom EverandDistributed Process Control ReportNo ratings yet
- Industrial Process Control: Advances and ApplicationsFrom EverandIndustrial Process Control: Advances and ApplicationsRating: 2 out of 5 stars2/5 (1)
- Faiic 2016-05 Alpha Coy AssignmentDocument4 pagesFaiic 2016-05 Alpha Coy AssignmentVincent De VeraNo ratings yet
- Wind Load Calculation + Design CriteriaDocument7 pagesWind Load Calculation + Design CriteriaAnonymous 2Dz4Kq9M7No ratings yet
- Sieve Designation Nominal Sieve Opening: Standard Mesh Inches MM MicronsDocument3 pagesSieve Designation Nominal Sieve Opening: Standard Mesh Inches MM MicronsmusaveerNo ratings yet
- Adult Cardiac Arrest AlgoritmaDocument1 pageAdult Cardiac Arrest AlgoritmaYouniehacibie Ichisky ChildNo ratings yet
- Borrowing Costs PDFDocument9 pagesBorrowing Costs PDFanjcabsNo ratings yet
- 4" Reception Unit: Description - Installation - Start-Up Operation - MaintenanceDocument10 pages4" Reception Unit: Description - Installation - Start-Up Operation - MaintenanceClarkFedele27No ratings yet
- Fog & MistDocument10 pagesFog & MistFahmi PrayogiNo ratings yet
- Streamlines Shape Hull PDFDocument15 pagesStreamlines Shape Hull PDFdleanteNo ratings yet
- Defect ListDocument7 pagesDefect ListriaNo ratings yet
- Surprises From Celiac Disease Scientific American August 2009Document8 pagesSurprises From Celiac Disease Scientific American August 2009Mihaly KovacsNo ratings yet
- Project Report On Indian OilDocument80 pagesProject Report On Indian OilPayal PatidarNo ratings yet
- Of Truth by Francis Bacon: Notes PDF Is in The Description Box of This VideoDocument8 pagesOf Truth by Francis Bacon: Notes PDF Is in The Description Box of This VideoMuhammad NomanNo ratings yet
- Si47 1971 Frenic Lift Loader Im WebDocument128 pagesSi47 1971 Frenic Lift Loader Im WebLogic EngineeringNo ratings yet
- Pioneer WoodlandsDocument38 pagesPioneer Woodlandsapi-249262419No ratings yet
- Love Your Problems - WilcoxDocument11 pagesLove Your Problems - Wilcoxamarinder singhNo ratings yet
- Netflix ReportDocument9 pagesNetflix ReportMarijuana MomentNo ratings yet
- Catchillar - Environmental LawsDocument10 pagesCatchillar - Environmental LawsPam SyNo ratings yet
- OISD-GDN-212-Petroleum Env AuditDocument39 pagesOISD-GDN-212-Petroleum Env AuditYani EsbeNo ratings yet
- Craftsman Snowblower ManualDocument64 pagesCraftsman Snowblower ManualKevinNo ratings yet
- Maintenance Manual: Thermo King Corp., Minneapolis, MN, U.S.ADocument52 pagesMaintenance Manual: Thermo King Corp., Minneapolis, MN, U.S.AING. RUBENSNo ratings yet
- Pioneer Deh-2200ub 2250ub KeyboardDocument6 pagesPioneer Deh-2200ub 2250ub KeyboardYEMC YEMC0% (1)
- Physics 326 - Optics and Laser Physics 2017Document123 pagesPhysics 326 - Optics and Laser Physics 2017Parthasarathi JoarderNo ratings yet
- Schrack Accessories Industrial Power Relay RT: General Purpose RelaysDocument6 pagesSchrack Accessories Industrial Power Relay RT: General Purpose RelaysUlfran MedinaNo ratings yet
- 6 Food Borne Pathogens Staphylococcus AureusDocument50 pages6 Food Borne Pathogens Staphylococcus Aureusdr Alex stanNo ratings yet
- Reality Shifting ResearchDocument7 pagesReality Shifting ResearchMc Cruzt KristoferNo ratings yet
- B1900d LimitationsDocument3 pagesB1900d LimitationsMikeParsonsNo ratings yet