Download as pdf or txt
You might also like
- Lecture Notes Applied Mathematics For Business, Economics, and The Social Sciences (4th Edition) by Budnick PDFDocument171 pagesLecture Notes Applied Mathematics For Business, Economics, and The Social Sciences (4th Edition) by Budnick PDFRizwan Malik100% (5)
- Solution Manual For Discrete Time Signal Processing 3 E 3rd Edition Alan V Oppenheim Ronald W SchaferDocument4 pagesSolution Manual For Discrete Time Signal Processing 3 E 3rd Edition Alan V Oppenheim Ronald W SchaferHoward ZhangNo ratings yet
- 3.4 Geometry Linear SystemsDocument4 pages3.4 Geometry Linear SystemsChloeNo ratings yet
- Section 1.1Document31 pagesSection 1.1Amna OmerNo ratings yet
- SolvabilityDocument9 pagesSolvabilityhrishita102No ratings yet
- Chapter 11Document3 pagesChapter 11muhammedNo ratings yet
- L10 L12Document4 pagesL10 L12Luise FangNo ratings yet
- 2024-02-20 MA110 Slides CompilationDocument62 pages2024-02-20 MA110 Slides CompilationmayankspareNo ratings yet
- Chapter Three Systems of Linear Equations: Dr. Asma AlramleDocument12 pagesChapter Three Systems of Linear Equations: Dr. Asma AlramleRetaj LibyaNo ratings yet
- Advanced Engineering Mathematics (Meng 6301) : Shimelis BekeleDocument79 pagesAdvanced Engineering Mathematics (Meng 6301) : Shimelis BekeleMogesNo ratings yet
- 3.6 Iterative Methods For Solving Linear SystemsDocument35 pages3.6 Iterative Methods For Solving Linear SystemsAbdulaziz H. Al-MutairiNo ratings yet
- S10 Prodigies PPTDocument33 pagesS10 Prodigies PPTKrish GuptaNo ratings yet
- 非平凡解Document8 pages非平凡解yonghao liuNo ratings yet
- Student Lecture 32 Systems of ODEsDocument5 pagesStudent Lecture 32 Systems of ODEsuploadingpersonNo ratings yet
- Further Mathematical Methods (Linear Algebra) 2002 Solutions For Problem Sheet 4Document10 pagesFurther Mathematical Methods (Linear Algebra) 2002 Solutions For Problem Sheet 4Gag PafNo ratings yet
- Financial Mathematics 101 - Week 1: Lecture 2: 1 Types of LinesDocument6 pagesFinancial Mathematics 101 - Week 1: Lecture 2: 1 Types of LinesKristel AndreaNo ratings yet
- Problem Set 6: 2 1 2 1 T 2 T T 2 T 3 TDocument6 pagesProblem Set 6: 2 1 2 1 T 2 T T 2 T 3 TAkshu AshNo ratings yet
- The Rank of A Matrix: 1 Rank and Solutions To Linear SystemsDocument3 pagesThe Rank of A Matrix: 1 Rank and Solutions To Linear SystemsBharathi RajaNo ratings yet
- Least Squares Solution and Pseudo-Inverse: Bghiggins/Ucdavis/Ech256/Jan - 2012Document12 pagesLeast Squares Solution and Pseudo-Inverse: Bghiggins/Ucdavis/Ech256/Jan - 2012Anonymous J1scGXwkKDNo ratings yet
- Homework # 2 Solutions: Math 152, Fall 2014 Instructor: Dr. Doreen de LeonDocument3 pagesHomework # 2 Solutions: Math 152, Fall 2014 Instructor: Dr. Doreen de LeonHân BảoNo ratings yet
- Characteristics ChapterDocument30 pagesCharacteristics Chapternarainier88No ratings yet
- Exercises: Waves in SpaceDocument3 pagesExercises: Waves in SpaceKazaValiShaikNo ratings yet
- Final ExamDocument6 pagesFinal ExamSara GallegoNo ratings yet
- 1system of Linear EquationsDocument64 pages1system of Linear EquationsJoelar OndaNo ratings yet
- Wiliam Rowan Hamilton - On Equations of The Fifth Degree-M.H. Gill (2000)Document42 pagesWiliam Rowan Hamilton - On Equations of The Fifth Degree-M.H. Gill (2000)alvarezdiaz_11921176No ratings yet
- Set of Problems MA1140 Version7 LastDocument12 pagesSet of Problems MA1140 Version7 LastAhmed SihorwalaNo ratings yet
- 3 - Power Series PDFDocument98 pages3 - Power Series PDFفراس فيصلNo ratings yet
- Math 201 Lecture 23: Power Series Method For Equations With Poly-Nomial CoefficientsDocument5 pagesMath 201 Lecture 23: Power Series Method For Equations With Poly-Nomial CoefficientsTanNguyễnNo ratings yet
- Eigenvalue EigenvectorDocument69 pagesEigenvalue EigenvectordibyodibakarNo ratings yet
- Lec Week2 PDFDocument5 pagesLec Week2 PDFNavanNo ratings yet
- Math114 L1 - ReviewLinearSystemsDocument1 pageMath114 L1 - ReviewLinearSystemsjlescanerNo ratings yet
- LAWeek1 MA2006-2Document32 pagesLAWeek1 MA2006-2davidbehNo ratings yet
- WEEK 5-StudentDocument47 pagesWEEK 5-Studenthafiz patahNo ratings yet
- ProblemsDocument62 pagesProblemserad_5No ratings yet
- Algebraic Combinatorics - Po-Shen-Loh - MOP 2011Document5 pagesAlgebraic Combinatorics - Po-Shen-Loh - MOP 2011David DavidNo ratings yet
- 01 Math2121Document5 pages01 Math2121Wong Cheuk HinNo ratings yet
- Linear Dependence and ConsistencyDocument4 pagesLinear Dependence and ConsistencyAjayi DemiladeNo ratings yet
- Notes LinearregressionDocument4 pagesNotes Linearregressionikermorales1221No ratings yet
- Series Solutions To Differential EquationsDocument9 pagesSeries Solutions To Differential EquationstirsollantadaNo ratings yet
- ReviewsolutionsDocument9 pagesReviewsolutionschicknaliaNo ratings yet
- Notas de OptimizacionDocument3 pagesNotas de OptimizacionRaul Mijares EgueguigurenNo ratings yet
- Note 2Document20 pagesNote 2Jiasheng NiNo ratings yet
- CDS270-I Lecture2Document13 pagesCDS270-I Lecture2sab238633No ratings yet
- Defining Linear TransformationsDocument9 pagesDefining Linear TransformationsAshvin GraceNo ratings yet
- 1 MATH 129 - Chapter One: Systems of Linear EquationsDocument21 pages1 MATH 129 - Chapter One: Systems of Linear EquationsBlaziyNo ratings yet
- K Is An: Ramanujan GraphsDocument8 pagesK Is An: Ramanujan GraphsVinay KumarNo ratings yet
- MTH101Document13 pagesMTH101Deepanshu BansalNo ratings yet
- Complex MatricesDocument13 pagesComplex Matriceschecheche24No ratings yet
- Lecture Notes On Flows and Cuts 4.1 Maximum FlowsDocument13 pagesLecture Notes On Flows and Cuts 4.1 Maximum FlowschetanaNo ratings yet
- Corollary 2 (Farkas's Theorem As A Consequence of Theorem 2.7.3)Document1 pageCorollary 2 (Farkas's Theorem As A Consequence of Theorem 2.7.3)WilliamDog LiNo ratings yet
- 1 Exercises: Physics 195 Course Notes Angular Momentum Solutions To Problems 030131 F. PorterDocument48 pages1 Exercises: Physics 195 Course Notes Angular Momentum Solutions To Problems 030131 F. PorterKadu BritoNo ratings yet
- C 03 MatricesDocument83 pagesC 03 Matricessongpengyuan123No ratings yet
- 1 Solving Systems of Linear Equations: Gaussian Elimination: Lecture 9: October 26, 2021Document8 pages1 Solving Systems of Linear Equations: Gaussian Elimination: Lecture 9: October 26, 2021Pushkaraj PanseNo ratings yet
- Lecture 1Document5 pagesLecture 1johnte vokeNo ratings yet
- L3Document7 pagesL3Agarwal HimanshuNo ratings yet
- 2.3 Matrix Formulation: Example 2.13Document18 pages2.3 Matrix Formulation: Example 2.13johncruz32No ratings yet
- Condition Numbers and Backward Error of A Matrix PDocument19 pagesCondition Numbers and Backward Error of A Matrix PDiana Mendez AstudilloNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Lecture 4 LinAlgDocument40 pagesLecture 4 LinAlgLodeNo ratings yet
- Lecture 5 LinAlgDocument35 pagesLecture 5 LinAlgLodeNo ratings yet
- Lecture 2 LinAlgDocument32 pagesLecture 2 LinAlgLodeNo ratings yet
- Lecture5 Calc1Document6 pagesLecture5 Calc1LodeNo ratings yet
- Lecture 1 LinAlgDocument50 pagesLecture 1 LinAlgLodeNo ratings yet
- Syllabus2022 Calc1Document4 pagesSyllabus2022 Calc1LodeNo ratings yet
- Lecture2:3 Calc1Document6 pagesLecture2:3 Calc1LodeNo ratings yet
- Lecture4 Calc1Document6 pagesLecture4 Calc1LodeNo ratings yet
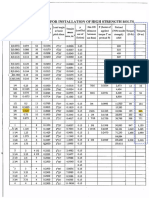
- Torque Using in Installation For HSBDocument1 pageTorque Using in Installation For HSBKeith CuberoNo ratings yet
- CHE 3313 - Lab 07 - Boiler EfficiencyDocument7 pagesCHE 3313 - Lab 07 - Boiler EfficiencykhalifaNo ratings yet
- Dynamic Design Analysis Method (DDAM) With Abaqus 2005Document1 pageDynamic Design Analysis Method (DDAM) With Abaqus 2005SIMULIACorpNo ratings yet
- Thesis Xiaohong Wang - PdfioerthDocument206 pagesThesis Xiaohong Wang - PdfioerthLouis LaiNo ratings yet
- TG Lube Oil FlushingDocument3 pagesTG Lube Oil FlushingS V NAGESHNo ratings yet
- PIPE by Capote - TermsDocument109 pagesPIPE by Capote - TermsRochelle May CatbaganNo ratings yet
- Fracture MechanicsDocument31 pagesFracture MechanicsDhany SSat100% (2)
- Hydraulic Design of Intake IS 9761: 1995 DataDocument29 pagesHydraulic Design of Intake IS 9761: 1995 DataGokulNo ratings yet
- Final Project Report - Group 7 PDFDocument154 pagesFinal Project Report - Group 7 PDFNhut NguyenNo ratings yet
- Amca 801-01 (R2008) PDFDocument61 pagesAmca 801-01 (R2008) PDFandrés morantes100% (1)
- Manuel D'instructions Manuale Di Istruzioni Instruction ManualDocument72 pagesManuel D'instructions Manuale Di Istruzioni Instruction Manualanilr008No ratings yet
- Transmission Lines & Wave GuidesDocument268 pagesTransmission Lines & Wave GuidesRamanjaneyulu Anji Yadav100% (2)
- Test Methods For On Site Measurement of Resistivity of Concrete A RILEM TC-154 Technical RecommendationDocument7 pagesTest Methods For On Site Measurement of Resistivity of Concrete A RILEM TC-154 Technical RecommendationCharnjeet SinghNo ratings yet
- Class 31: Outline: Hour 1: Concept Review / Overview PRS Questions - Possible Exam Questions Hour 2Document46 pagesClass 31: Outline: Hour 1: Concept Review / Overview PRS Questions - Possible Exam Questions Hour 2akirank1No ratings yet
- Substation Automation SystemDocument5 pagesSubstation Automation Systembinode0% (1)
- Mag Lev 1Document4 pagesMag Lev 1jyotsu16pansareNo ratings yet
- 12 SM Physics English 2019 20Document384 pages12 SM Physics English 2019 20Rahul Kumar RayNo ratings yet
- Application of Chitosan Shells Meti Batissa ViolacDocument12 pagesApplication of Chitosan Shells Meti Batissa Violacnia herianiNo ratings yet
- SpringsDocument11 pagesSpringsShyam N NelluliNo ratings yet
- 06 Sep-603b Ref Ret 670Document13 pages06 Sep-603b Ref Ret 670m khNo ratings yet
- Mod2 Mwa CompressedDocument17 pagesMod2 Mwa CompressedsalusivasankaranNo ratings yet
- M14Document30 pagesM14Imran Amaleena100% (2)
- Danfoss BbauerDocument35 pagesDanfoss Bbauerjhephe46No ratings yet
- NTSE SAT Physics Light Reflection and Mirror MCQS, Multiple Choice QuestionsDocument10 pagesNTSE SAT Physics Light Reflection and Mirror MCQS, Multiple Choice QuestionsShailesh KulkarniNo ratings yet
- h2 2 Midterm2 ch2Document6 pagesh2 2 Midterm2 ch2api-2638466480% (1)
- A Teoria Da Perspectiva e As Mudanças de Preferência PDFDocument17 pagesA Teoria Da Perspectiva e As Mudanças de Preferência PDFRogerio GuahyNo ratings yet
- 2012 SH1 H2 Math CT Revison Package SolutionsDocument89 pages2012 SH1 H2 Math CT Revison Package SolutionsAnnabel Seah0% (1)
- 5 Aerosol Pioneer Edited Aug CNDaviesDocument3 pages5 Aerosol Pioneer Edited Aug CNDaviesNarinder SinghNo ratings yet
- 2009-Writing Scientific Research ArticlesDocument20 pages2009-Writing Scientific Research ArticlesNguyen Van DuyNo ratings yet
- Superior Mathematics From An Elementary Point of ViewDocument196 pagesSuperior Mathematics From An Elementary Point of ViewJoão MotaNo ratings yet