Download as pdf or txt
You might also like
- 2AIRCRAFT STRUCTURES I (Review)Document150 pages2AIRCRAFT STRUCTURES I (Review)July Tade100% (1)
- Mini-Project Bolted JointsDocument5 pagesMini-Project Bolted JointshouriaNo ratings yet
- Lab 5-Force in A Statically Determinate Cantilever Truss UTHMDocument15 pagesLab 5-Force in A Statically Determinate Cantilever Truss UTHMMoly Muliyani75% (8)
- Modeling, Simulation and Control of A Robotic ArmDocument7 pagesModeling, Simulation and Control of A Robotic ArmaseptaNo ratings yet
- 1st Order & 2nd Order AnalysisDocument19 pages1st Order & 2nd Order AnalysisBoon Fui0% (1)
- Chapter 74Document6 pagesChapter 74Jay Ryan G. GajetonNo ratings yet
- Virtual Work (Deflection)Document46 pagesVirtual Work (Deflection)Rovic JayNo ratings yet
- Problem 1: Determine The Horizontal Displacement and Rotation of The Frame Shown Below at Support DDocument16 pagesProblem 1: Determine The Horizontal Displacement and Rotation of The Frame Shown Below at Support Dkurou hazamaNo ratings yet
- IFEM HW03 Sol Ch07Document5 pagesIFEM HW03 Sol Ch07halil yıldırımNo ratings yet
- 1.12 - Moment Distribution Method of Analysis of Structures - Engineering LibreTextsDocument12 pages1.12 - Moment Distribution Method of Analysis of Structures - Engineering LibreTextsmarshaldonnelshokoNo ratings yet
- Curved BeamsDocument9 pagesCurved BeamsdrflorentiaNo ratings yet
- Engr 320 201 Midterm 2020 Solutions Ver2Document9 pagesEngr 320 201 Midterm 2020 Solutions Ver2xenping234No ratings yet
- Figure 1: A Statically Determinate Beam Subjected To A Point LoadDocument7 pagesFigure 1: A Statically Determinate Beam Subjected To A Point Loadkurou hazamaNo ratings yet
- 7 Damage Mechanics: Anisotropy Have Been Formulated in Detail. This Chapter Is Concerned WithDocument20 pages7 Damage Mechanics: Anisotropy Have Been Formulated in Detail. This Chapter Is Concerned WithmaheshNo ratings yet
- Transformation of StressDocument56 pagesTransformation of StressAlexandre BonosNo ratings yet
- Lab 6 Filter StructureDocument9 pagesLab 6 Filter StructureWaleed SaeedNo ratings yet
- Lecture 1: Finite Elements for Elastic Stability: EA Π = ε dx - Pv + P v 2Document23 pagesLecture 1: Finite Elements for Elastic Stability: EA Π = ε dx - Pv + P v 2Sarif NazarNo ratings yet
- 2D Elastostatic Problem Using Finite Element MethodDocument6 pages2D Elastostatic Problem Using Finite Element MethodIchan CochingNo ratings yet
- Exercise - 2 PDFDocument2 pagesExercise - 2 PDFKritiNo ratings yet
- Lecture-7-Part 1-Strength of Materials - Bending StressesDocument41 pagesLecture-7-Part 1-Strength of Materials - Bending Stressesarno assassinNo ratings yet
- Exam Questions +solutions UT Q1234Document9 pagesExam Questions +solutions UT Q1234LexNo ratings yet
- Analysis and Design of Reinforced Concrete Structures 2: Dr. Hasan AlbegmprliDocument14 pagesAnalysis and Design of Reinforced Concrete Structures 2: Dr. Hasan AlbegmprlialpegambarliNo ratings yet
- Design of FootingDocument8 pagesDesign of FootingRozhelle PedernalNo ratings yet
- T. Viswanathan 3. Ultimate Limit State of Linear Elements (Modified 28-Jul)Document69 pagesT. Viswanathan 3. Ultimate Limit State of Linear Elements (Modified 28-Jul)Bridge DepartmentNo ratings yet
- Exercise 11: Deformation of C-BarDocument10 pagesExercise 11: Deformation of C-Barjdial9664No ratings yet
- Module 5: Force Method - Introduction and Applications Lecture 2: The Force MethodDocument15 pagesModule 5: Force Method - Introduction and Applications Lecture 2: The Force Methodstephannie montoyaNo ratings yet
- Lec 30 PDFDocument15 pagesLec 30 PDFCipriano Irasmo Da SilvaNo ratings yet
- Software For Engineer DesignDocument17 pagesSoftware For Engineer DesignBayar JargalNo ratings yet
- 7.6 Superpostions of Stationary StatesDocument9 pages7.6 Superpostions of Stationary StatesVia Monica DeviNo ratings yet
- Deflection of TrussesDocument9 pagesDeflection of TrussesfranckoNo ratings yet
- Stability of Infinite Slope With SeepageDocument4 pagesStability of Infinite Slope With SeepageNiwrad LajomNo ratings yet
- NFEM Ch07Document20 pagesNFEM Ch07sujayan2005No ratings yet
- Fig. 7.13 Schematic diagram of a Δ - Δ connected transformerDocument2 pagesFig. 7.13 Schematic diagram of a Δ - Δ connected transformerThức VõNo ratings yet
- Lecture 2 Stress ApplicationsDocument9 pagesLecture 2 Stress ApplicationsHussein AssamNo ratings yet
- CE 151 Chapter 4 Lecture NotesDocument27 pagesCE 151 Chapter 4 Lecture NotesNAJEB PENDIAMANNo ratings yet
- Structural Theory - Part 2b - Illustrative ProblemsDocument14 pagesStructural Theory - Part 2b - Illustrative ProblemsErlinda Olegario MarasiganNo ratings yet
- EEEE5103 DSP TutorialsDocument1 pageEEEE5103 DSP TutorialsDaniel EkassiNo ratings yet
- Analysis of Joist-Girder 2008 - Part - 4Document14 pagesAnalysis of Joist-Girder 2008 - Part - 4Adnan NajemNo ratings yet
- CAP 9 Shear Strength - Block Shear - Deflections - DesignDocument11 pagesCAP 9 Shear Strength - Block Shear - Deflections - Designcarlomonsalve1No ratings yet
- Torsion of Circular SectionsDocument10 pagesTorsion of Circular SectionsOlabisi Isaac ShoyodeNo ratings yet
- Chapter 5Document17 pagesChapter 5Robel MetikuNo ratings yet
- Chapter 7Document36 pagesChapter 7ajayNo ratings yet
- Topic 7 Momentum EquationsDocument37 pagesTopic 7 Momentum EquationsMerwin Andrew UyNo ratings yet
- Inelastic Design MethodsDocument29 pagesInelastic Design MethodsZac Balhorn100% (1)
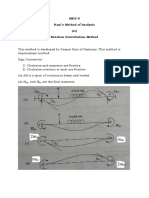
- Unit-V Kani's Method of Analysis (Or) Rotation Contribution MethodDocument25 pagesUnit-V Kani's Method of Analysis (Or) Rotation Contribution MethodraghuNo ratings yet
- MD2 Ass4 ENG. Ahmad Assaf BDocument21 pagesMD2 Ass4 ENG. Ahmad Assaf BAmna AlenziNo ratings yet
- 5 Fea CadDocument12 pages5 Fea CadMohamed AbdelazizNo ratings yet
- Local Media4178172399701279302Document9 pagesLocal Media4178172399701279302Koalatzy.No ratings yet
- Lec 08 Minimizing Compressor WorkDocument16 pagesLec 08 Minimizing Compressor WorkJunaid KhanNo ratings yet
- 1.3-Force Systems Intro - Components & ResultantsDocument7 pages1.3-Force Systems Intro - Components & ResultantsAlfred AlfredNo ratings yet
- Reporte ExtendidoDocument13 pagesReporte Extendidoluis rodriguezNo ratings yet
- Analogue Electronics CW1 ReportDocument10 pagesAnalogue Electronics CW1 Reportssyxz10No ratings yet
- Tutor - Chap 6 - Analysis of StructuresDocument10 pagesTutor - Chap 6 - Analysis of StructuresMUHAMMAD AQIM MOHD SUHAIMINo ratings yet
- Act.2 - San Jose, KM. - AE-402-1Document13 pagesAct.2 - San Jose, KM. - AE-402-1큐피드 CUPIDNo ratings yet
- Ee610 hw3 Au23Document3 pagesEe610 hw3 Au23VIKAS JAATNo ratings yet
- Frame FlexibilityDocument36 pagesFrame FlexibilityPrashant ThapaNo ratings yet
- Modeling, Simulation and Control of A Robotic Arm PDFDocument7 pagesModeling, Simulation and Control of A Robotic Arm PDFshivaramreddyNo ratings yet
- Compensation Exam 20230710Document4 pagesCompensation Exam 20230710Amit AgarwalNo ratings yet
- Chapter 74Document6 pagesChapter 74Jay Ryan G. GajetonNo ratings yet
- 01 BSD - Introduction NBCPDocument13 pages01 BSD - Introduction NBCPJay Ryan G. GajetonNo ratings yet
- CfefinalsDocument153 pagesCfefinalsJay Ryan G. GajetonNo ratings yet
- Problem Set 2Document2 pagesProblem Set 2Jay Ryan G. GajetonNo ratings yet
- Analysis of Beams: ObjectivesDocument6 pagesAnalysis of Beams: ObjectivesLegendaryNNo ratings yet
- Shafts and Shaft Components: Machine Design IIDocument48 pagesShafts and Shaft Components: Machine Design IIEngr Aleem AmjadNo ratings yet
- Castigliano's Theorem - GDLCDocument17 pagesCastigliano's Theorem - GDLCjohnvchristy7No ratings yet
- Apj Abdul Kalam Technological University: Scheme For Valuation/Answer KeyDocument3 pagesApj Abdul Kalam Technological University: Scheme For Valuation/Answer KeyJASON CHERIAN MENo ratings yet
- BeamDocument29 pagesBeamAnubhav ShrivastavaNo ratings yet
- Statics: Vector Mechanics For EngineersDocument39 pagesStatics: Vector Mechanics For EngineersVijay KumarNo ratings yet
- Experiment 5Document6 pagesExperiment 5Mehboob MeharNo ratings yet
- Purlin Design PDFDocument3 pagesPurlin Design PDFUday Udmale100% (1)
- Portal Frames PDFDocument28 pagesPortal Frames PDFLingka100% (1)
- Lab3-Deflection MOMDocument12 pagesLab3-Deflection MOMLudik CarvalhoNo ratings yet
- DCC20053Document14 pagesDCC20053nurawatiff105No ratings yet
- QB AnsDocument29 pagesQB Ans18WJ1A03F4 Shashank reddyNo ratings yet
- Ace EdxDocument9 pagesAce EdxkaicaNo ratings yet
- Initial Sizing - UpdatedDocument22 pagesInitial Sizing - UpdatedMuhammad Nuril FahmiNo ratings yet
- Basic ConceptsDocument6 pagesBasic ConceptsAmro Ahmad AliNo ratings yet
- Strap Beam FootingDocument4 pagesStrap Beam Footingrukesh104No ratings yet
- Tos MicroprojectDocument10 pagesTos MicroprojectAkash ChourasiaNo ratings yet
- 2011 Structural MechanicsDocument6 pages2011 Structural MechanicsJakeGrahamBellNo ratings yet
- Module 4 Structural Theory 2Document19 pagesModule 4 Structural Theory 2JhudeNo ratings yet
- 477-Bending Test 2021Document31 pages477-Bending Test 2021Ahmed KhasawnehNo ratings yet
- Mechanics of Solids-II MEC-206ADocument3 pagesMechanics of Solids-II MEC-206AManish KumarNo ratings yet
- SFD and BMDDocument18 pagesSFD and BMDManash Protim GogoiNo ratings yet
- Fall 2011 EM 319 Syllabus - Nanshu Lu - v2.0Document6 pagesFall 2011 EM 319 Syllabus - Nanshu Lu - v2.0Ciara Mae WaldronNo ratings yet
- 2 Way SlabDocument22 pages2 Way SlabAhmed Al-AmriNo ratings yet
- Chapter 4 Shear and Moment in BeamsDocument42 pagesChapter 4 Shear and Moment in Beamssaleemm_2No ratings yet
- Mechanics of Materials: Combined StressesDocument3 pagesMechanics of Materials: Combined StressesUmut Enes SürücüNo ratings yet
- UNIT-1 Fixed and Continuous Beams 1.1) IntroductionDocument4 pagesUNIT-1 Fixed and Continuous Beams 1.1) IntroductionJohn CenaNo ratings yet