Download as pdf or txt
You might also like
- Query To Get Inventory Material Aging at Oracle CloudDocument9 pagesQuery To Get Inventory Material Aging at Oracle CloudNader FanousNo ratings yet
- JLD614 ManualDocument8 pagesJLD614 ManualJ.R. VincentNo ratings yet
- Experiment - 5: Temperature Control in A Mixing-Heating ProcessDocument13 pagesExperiment - 5: Temperature Control in A Mixing-Heating ProcessKalepu Navya ManishaNo ratings yet
- Exp 6 Gas Temperature Process ControlDocument13 pagesExp 6 Gas Temperature Process Controlmohamad ashaziq100% (8)
- Quiz #5Document2 pagesQuiz #5erzhanNo ratings yet
- Experiment No 3Document10 pagesExperiment No 3Sakshi GargNo ratings yet
- Lab 4 - Control Time-Delay SystemDocument8 pagesLab 4 - Control Time-Delay SystemDƯƠNG HUỲNH ĐÌNH CHIÊUNo ratings yet
- Metodo de Ziegler-NicholsDocument3 pagesMetodo de Ziegler-Nicholsjuan daniel camas cruzNo ratings yet
- A) Ziegler-Nichols Method:: Exercises Simulator Automatisation 3th Bachelor Marine EngineeringDocument3 pagesA) Ziegler-Nichols Method:: Exercises Simulator Automatisation 3th Bachelor Marine EngineeringvivekvkumarNo ratings yet
- Exp 5 PID Controller Tuning On A Real Time Temperature Control System.Document5 pagesExp 5 PID Controller Tuning On A Real Time Temperature Control System.Hardik AgravattNo ratings yet
- PID Controller Tuning Using "Ziegler-Nichols" TechniqueDocument5 pagesPID Controller Tuning Using "Ziegler-Nichols" Technique;(No ratings yet
- Control SystemDocument12 pagesControl Systemsampath bandaraNo ratings yet
- SBHS1Document5 pagesSBHS1Rahul PancholiNo ratings yet
- Control System LabDocument24 pagesControl System LabRahul Kumar KanoujiaNo ratings yet
- PID ControllerDocument5 pagesPID ControllerIcarus CanNo ratings yet
- Two Tank Non-Interacting Liquid Level SystemDocument9 pagesTwo Tank Non-Interacting Liquid Level SystemHimanshu JatNo ratings yet
- System and Automatic Control Lab (EC-218)Document4 pagesSystem and Automatic Control Lab (EC-218)arjunv_14No ratings yet
- Instruction Manual: 1. Product HighlightsDocument7 pagesInstruction Manual: 1. Product HighlightsNick RossNo ratings yet
- Temperature Control System and Its Control Using PID ControllerDocument3 pagesTemperature Control System and Its Control Using PID Controllerinty vacaNo ratings yet
- Delta Instruments Regulator PIDDocument7 pagesDelta Instruments Regulator PIDRuth Alma CotrutaNo ratings yet
- Control System I Practical Iv Semester, B.Tech Ee Course Code: Eec273Document5 pagesControl System I Practical Iv Semester, B.Tech Ee Course Code: Eec273JomeNo ratings yet
- Me2121-2 Performance Evaluation of Air-Conditioners (E1-03-01)Document11 pagesMe2121-2 Performance Evaluation of Air-Conditioners (E1-03-01)hybri8No ratings yet
- Implementation of Matlab-SIMULINK Based Real Time Temperature Control For Set Point ChangesDocument8 pagesImplementation of Matlab-SIMULINK Based Real Time Temperature Control For Set Point ChangesIngole DeepakNo ratings yet
- bài báo cáo httd cuối kìDocument7 pagesbài báo cáo httd cuối kìHoàng TháiNo ratings yet
- Skillbased Pid Control by Using Neural NetworksDocument6 pagesSkillbased Pid Control by Using Neural NetworksirfanNo ratings yet
- PID Vs Fuzzy ControlDocument28 pagesPID Vs Fuzzy ControlDaniel Rojas BarrientosNo ratings yet
- Implementation of Fuzzy Temperature Control Using MicroprocessorDocument6 pagesImplementation of Fuzzy Temperature Control Using Microprocessorankith j raiNo ratings yet
- Design of PID Controller For First Order and Second Order SystemsDocument8 pagesDesign of PID Controller For First Order and Second Order SystemsAliaa TarekNo ratings yet
- Industrial Automation: (Getting Started Week - 1)Document20 pagesIndustrial Automation: (Getting Started Week - 1)Gaurav SoniNo ratings yet
- Taller Final de EjerciciosDocument7 pagesTaller Final de EjerciciosEduar QuirozNo ratings yet
- Cat 2 QPDocument3 pagesCat 2 QPappu KandathilNo ratings yet
- Experiment 1 Ziegler Nichols Tuning: 1 ObjectiveDocument6 pagesExperiment 1 Ziegler Nichols Tuning: 1 ObjectiveHEMANT KUMARNo ratings yet
- Auto Tuning of PID Controller For MIMO Processes: M. J. Lengare, R. H. Chile, L. M. Waghmare and Bhavesh ParmarDocument4 pagesAuto Tuning of PID Controller For MIMO Processes: M. J. Lengare, R. H. Chile, L. M. Waghmare and Bhavesh ParmarDavid DebonoNo ratings yet
- Microcontroller Based Intelligent Temperature Controller For GreenhouseDocument5 pagesMicrocontroller Based Intelligent Temperature Controller For GreenhouseresearchinventyNo ratings yet
- 200W TEC Air Conditioner SpecificationDocument8 pages200W TEC Air Conditioner Specificationtuananh1965No ratings yet
- Hvac ExperimentDocument9 pagesHvac ExperimentShadan MuNo ratings yet
- Lab F Linear MPCDocument2 pagesLab F Linear MPCHabiyaremye JosephNo ratings yet
- Control SystemDocument36 pagesControl SystemARVINDNo ratings yet
- LAb Exp 7Document12 pagesLAb Exp 7Md Abid AfridiNo ratings yet
- Exp3 PDC Sample2Document13 pagesExp3 PDC Sample2Haziq AzliNo ratings yet
- Lab 7-CSDocument8 pagesLab 7-CSkashafNo ratings yet
- Process Dynamic ControlDocument7 pagesProcess Dynamic ControlAyunie FazlinNo ratings yet
- Temperature Control Waterbath Control System Using PID ControllerDocument5 pagesTemperature Control Waterbath Control System Using PID ControllerReno Sandy YusufNo ratings yet
- Closed Loop Response of Temperature Control SystemDocument6 pagesClosed Loop Response of Temperature Control SystemsjsujiprasadNo ratings yet
- Final Report 4, Temperature Control PDFDocument30 pagesFinal Report 4, Temperature Control PDFmelanNo ratings yet
- Experiment 06: Study of Process Control-I: Mesbah Ahmad Lecturer Department of Chemical Engineering, BUETDocument18 pagesExperiment 06: Study of Process Control-I: Mesbah Ahmad Lecturer Department of Chemical Engineering, BUETMd Abid AfridiNo ratings yet
- Application Note AN2208: Universal PID-ThermoregulatorDocument17 pagesApplication Note AN2208: Universal PID-ThermoregulatorJ Daniel PichardoNo ratings yet
- HornoDocument4 pagesHornoedyjheisonv100% (1)
- Application of Temperature Fuzzy Controller in An Indirect Resistance FurnaceDocument16 pagesApplication of Temperature Fuzzy Controller in An Indirect Resistance FurnacesagknNo ratings yet
- Me Lab 8Document7 pagesMe Lab 8BensoyNo ratings yet
- C Ontrol SystemDocument39 pagesC Ontrol SystemARVINDNo ratings yet
- 02 PIDcontroller PDFDocument5 pages02 PIDcontroller PDFZugravu AndreiNo ratings yet
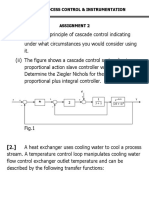
- 1.) (I) Explain The Principle of Cascade Control IndicatingDocument7 pages1.) (I) Explain The Principle of Cascade Control IndicatingmutencoNo ratings yet
- Bytronic SistemDocument6 pagesBytronic SistemSedat IriçNo ratings yet
- Modeling of Prototype: Gas Gs S Gas Gs SDocument8 pagesModeling of Prototype: Gas Gs S Gas Gs SAshley TillmanNo ratings yet
- PID Control of Heat Exchanger SystemDocument7 pagesPID Control of Heat Exchanger SystemHaris IhsannurNo ratings yet
- Journal of Electrical Engineering & Technology (JEET) : ©iaemeDocument8 pagesJournal of Electrical Engineering & Technology (JEET) : ©iaemeIAEME PublicationNo ratings yet
- Experiment No 11Document3 pagesExperiment No 11Usama MughalNo ratings yet
- PID Controller: Figure 1: A Crude Example For A RegulationDocument5 pagesPID Controller: Figure 1: A Crude Example For A RegulationAndres EspinosaNo ratings yet
- PID Controller PDFDocument5 pagesPID Controller PDFprasadNo ratings yet
- PID Arduino Control of Temperature by PWMDocument19 pagesPID Arduino Control of Temperature by PWMMatheus Cardoso100% (1)
- WSDC - Student PortalDocument1 pageWSDC - Student PortalKathireddy Shashank reddyNo ratings yet
- Nitw-Cce CertificateDocument1 pageNitw-Cce CertificateKathireddy Shashank reddyNo ratings yet
- Fee Payment Receipt For StudentDocument1 pageFee Payment Receipt For StudentKathireddy Shashank reddyNo ratings yet
- WSDC - Student Portal-4Document1 pageWSDC - Student Portal-4Kathireddy Shashank reddyNo ratings yet
- Registration Slip-Sem-5Document1 pageRegistration Slip-Sem-5Kathireddy Shashank reddyNo ratings yet
- WSDC - Student Portal-AllotmentDocument1 pageWSDC - Student Portal-AllotmentKathireddy Shashank reddyNo ratings yet
- EE354 EM-3 Lecture Schedule PS Jan 2023Document1 pageEE354 EM-3 Lecture Schedule PS Jan 2023Kathireddy Shashank reddyNo ratings yet
- Open Elective 1 - VI SemDocument46 pagesOpen Elective 1 - VI SemKathireddy Shashank reddyNo ratings yet
- 01 Session CSE401ADocument25 pages01 Session CSE401Asanjanshetty3No ratings yet
- VDA 6.3 2023 Upgrade Handout EspañolDocument69 pagesVDA 6.3 2023 Upgrade Handout EspañolDiego AlonsoNo ratings yet
- Software Development Life: Cycle (SDLC)Document34 pagesSoftware Development Life: Cycle (SDLC)JohnNo ratings yet
- Company ProfileDocument18 pagesCompany Profilefathurrahman a f nasutionNo ratings yet
- Control and GrafcetDocument4 pagesControl and Grafcetdarthvader909No ratings yet
- Associative MemoryDocument2 pagesAssociative MemoryImran Hussen100% (1)
- Software Quality Engineering (CT051-3-3-SQE) Individual AssignmentDocument24 pagesSoftware Quality Engineering (CT051-3-3-SQE) Individual AssignmentTeam-D1 (CSR)No ratings yet
- Ase - L2 - 3 PDFDocument51 pagesAse - L2 - 3 PDFUdara JNo ratings yet
- Second Review PTT 15062023Document28 pagesSecond Review PTT 15062023ANKUSH SINHANo ratings yet
- Unit - I Software Management Renaissance: Siddharth Group of Institutions:: PutturDocument4 pagesUnit - I Software Management Renaissance: Siddharth Group of Institutions:: PutturAnita Sofia KeyserNo ratings yet
- A Tentative Overview of The Course Is As Follows: 1. Introduction To Artificial Intelligence 2. Evolutionary Computation 3. Machine LearningDocument6 pagesA Tentative Overview of The Course Is As Follows: 1. Introduction To Artificial Intelligence 2. Evolutionary Computation 3. Machine Learningnikhilrane91_7522800No ratings yet
- Computer Vision Ii: Ai Courses by OpencvDocument3 pagesComputer Vision Ii: Ai Courses by OpencvJorge Wanderley RibeiroNo ratings yet
- Physics Aware Machine LearningDocument17 pagesPhysics Aware Machine LearningSantonu GNo ratings yet
- 04a Ppsi - Membuat WbsDocument23 pages04a Ppsi - Membuat WbsBilly LiyantoNo ratings yet
- Case Studies of Expert System & Research Aspects in Artificial IntelligenceDocument6 pagesCase Studies of Expert System & Research Aspects in Artificial IntelligenceAbdurrahman AlmhjeriNo ratings yet
- Truera Slides LLM Workshop Session 2Document38 pagesTruera Slides LLM Workshop Session 2uday samalaNo ratings yet
- GP1 - Q2 - Week 8Document5 pagesGP1 - Q2 - Week 8Shekaina Faith Cuizon LozadaNo ratings yet
- RI MES3053 - Sem220142015Document8 pagesRI MES3053 - Sem220142015mujahadahNo ratings yet
- Niewiara Lukasz Auto-Tuning 11 2013 PDFDocument11 pagesNiewiara Lukasz Auto-Tuning 11 2013 PDFarjun232No ratings yet
- Nonlinear Dynamic Matrix Control For Hig PDFDocument12 pagesNonlinear Dynamic Matrix Control For Hig PDFMMHFNo ratings yet
- Unit II-DMDocument53 pagesUnit II-DMrogithaNo ratings yet
- Master Logic DiagramDocument31 pagesMaster Logic DiagramitszoeyNo ratings yet
- OPTEAMIX - A Starter Handbook To RPA WhitepaperDocument15 pagesOPTEAMIX - A Starter Handbook To RPA Whitepapersanjith kNo ratings yet
- Certificate Programme in Machine LearningDocument3 pagesCertificate Programme in Machine Learningektasharma123No ratings yet
- Lab 1 Introduction To Object Oriented Software Engineering and Object Orientation in UmlDocument9 pagesLab 1 Introduction To Object Oriented Software Engineering and Object Orientation in Umlkpk kpkNo ratings yet
- SEN Pro1Document3 pagesSEN Pro1Kunal KhaireNo ratings yet
- AI MCQ QUESTION 100 MCQDocument13 pagesAI MCQ QUESTION 100 MCQdrphysics256No ratings yet
- CS403 Quiz2 Serh McqsDocument193 pagesCS403 Quiz2 Serh Mcqssapen79344No ratings yet