Download as pdf or txt
You might also like
- Iso 15213-1-2023Document28 pagesIso 15213-1-2023JOSEPH100% (7)
- Insert P2 - XIC - Out PDFDocument4 pagesInsert P2 - XIC - Out PDFAbbas Ali MirzaNo ratings yet
- Frequency Tracking in Power Networks in The Presence of HarmonicsDocument7 pagesFrequency Tracking in Power Networks in The Presence of HarmonicsFabien CallodNo ratings yet
- Design Techniques For Dual-Passband FiltersDocument7 pagesDesign Techniques For Dual-Passband FiltersrallabhandiSKNo ratings yet
- Ferrario 2000 0492Document3 pagesFerrario 2000 0492Particle Beam Physics LabNo ratings yet
- Wu 2017Document4 pagesWu 2017Moish KumarNo ratings yet
- Surface Micro Machined AccelerometersDocument10 pagesSurface Micro Machined AccelerometersjamsNo ratings yet
- Novel MEMS Filters For On-Chip Transceiver Architecture, Modeling and ExperimentsDocument13 pagesNovel MEMS Filters For On-Chip Transceiver Architecture, Modeling and ExperimentsMinh Le VanNo ratings yet
- Andres PaperDocument7 pagesAndres PaperRoque Rubén AndrésNo ratings yet
- Experimental and Numerical Analysis of A Transducer For The Generation of Guided WavesDocument9 pagesExperimental and Numerical Analysis of A Transducer For The Generation of Guided Wavesdavood abbasiNo ratings yet
- 2020 Springer - Infuence of Chamber Design On The Gas Sensing Performance of GFET - 2020Document11 pages2020 Springer - Infuence of Chamber Design On The Gas Sensing Performance of GFET - 2020rm5kqjtbwpNo ratings yet
- Zheng 2023 J. Phys. Conf. Ser. 2503 012092Document6 pagesZheng 2023 J. Phys. Conf. Ser. 2503 012092Caio WerneckNo ratings yet
- Fujino Et Al - 1993 - Active Stiffness Control of Cable VibrationDocument6 pagesFujino Et Al - 1993 - Active Stiffness Control of Cable VibrationzhangenqiNo ratings yet
- 論文03Document5 pages論文03張贇No ratings yet
- Accurate Electromagnetic Transient Simulations ofDocument7 pagesAccurate Electromagnetic Transient Simulations ofEmir JusićNo ratings yet
- Ultra-High Density Electron Beams For Beam Radiation and Beam Plasma InteractionDocument4 pagesUltra-High Density Electron Beams For Beam Radiation and Beam Plasma InteractionParticle Beam Physics LabNo ratings yet
- A Low Voltage All Digital On Chip Oscillator Using Relative Reference ModelingDocument6 pagesA Low Voltage All Digital On Chip Oscillator Using Relative Reference ModelingShruti KalraNo ratings yet
- Certain Topics in Telegraph Transmission Theory: H. NyquistDocument26 pagesCertain Topics in Telegraph Transmission Theory: H. NyquistdayyoosNo ratings yet
- Negative-Index Metamaterial at 780 NM WavelengthDocument3 pagesNegative-Index Metamaterial at 780 NM WavelengthdickNo ratings yet
- Finite Element Modeling of Capacitive Micromachined Ultrasonic TransducersDocument10 pagesFinite Element Modeling of Capacitive Micromachined Ultrasonic TransducersCesar ManNo ratings yet
- 1 s2.0 S0304885322009787 MainDocument9 pages1 s2.0 S0304885322009787 Maincastelo_grandeNo ratings yet
- A Novel, Cost-Effective Method For Loudspeakers Parameters MeasurementDocument7 pagesA Novel, Cost-Effective Method For Loudspeakers Parameters MeasurementdzymytchNo ratings yet
- s62 1 OnlineDocument2 pagess62 1 OnlineNOUARI mohamedNo ratings yet
- COIL Puskarczyk PaperDocument7 pagesCOIL Puskarczyk PaperAnonymous OARSwGsNo ratings yet
- Frequency Response of A Thin Cobalt Film Magnetooptic SensorDocument5 pagesFrequency Response of A Thin Cobalt Film Magnetooptic SensorAlex KarimNo ratings yet
- Band Tuning of A Waveguide Antenna Using A Reflective MetasurfaceDocument5 pagesBand Tuning of A Waveguide Antenna Using A Reflective MetasurfaceEngr Saleem ChandioNo ratings yet
- Rough-Granular Approach For Impulse Fault Classification of Transformers Using Cross-Wavelet TransformDocument8 pagesRough-Granular Approach For Impulse Fault Classification of Transformers Using Cross-Wavelet TransformDebojyoti MukherjeeNo ratings yet
- General Approach For Accurate ResonanceDocument3 pagesGeneral Approach For Accurate ResonanceM4gne7icNo ratings yet
- Mo MSoDocument8 pagesMo MSoali.kalairNo ratings yet
- ECE - Modeling and Simulation - ApurvaDocument12 pagesECE - Modeling and Simulation - ApurvaTJPRC PublicationsNo ratings yet
- Calculating The Current Distribution in Power TranDocument7 pagesCalculating The Current Distribution in Power TranEmal NiaziNo ratings yet
- 10 1109edssc 2016 7785210Document5 pages10 1109edssc 2016 7785210riya pc02No ratings yet
- A Simple SPICE Modeling Strategy For Common-Mode ChokesDocument9 pagesA Simple SPICE Modeling Strategy For Common-Mode ChokesMaurizio TrancheroNo ratings yet
- Dielectric ResonatorsDocument4 pagesDielectric ResonatorsKundan SumanNo ratings yet
- A - New - Process - Simulator - For - The - Optimization of Electron Beam Crosslinking ProcessesDocument7 pagesA - New - Process - Simulator - For - The - Optimization of Electron Beam Crosslinking ProcessesAroop Ratan SenNo ratings yet
- Pierced Sensor For A Nano-Microscope (NMSC) : R. Sklyar Verchratskogo St. 15-1, Lviv 79010 UkraineDocument4 pagesPierced Sensor For A Nano-Microscope (NMSC) : R. Sklyar Verchratskogo St. 15-1, Lviv 79010 UkraineFrontiers0% (1)
- An Experimental All-Band Nondirectional Transmitting Antenna - T2FDDocument2 pagesAn Experimental All-Band Nondirectional Transmitting Antenna - T2FDagressorbrNo ratings yet
- 2D Free Vibration Solution of The Hybrid Piezoelectric Laminated Beams Using Extended Kantorovich MethodDocument12 pages2D Free Vibration Solution of The Hybrid Piezoelectric Laminated Beams Using Extended Kantorovich MethodAnonymous wWOWz9UnWNo ratings yet
- Kellnerova - 2011 - Comparison of Wavelet Analysis With Velocity Derivatives For Detection of ShearDocument11 pagesKellnerova - 2011 - Comparison of Wavelet Analysis With Velocity Derivatives For Detection of Sheardoutor manelNo ratings yet
- A Design Technique For Microstrip Filters: January 2009Document6 pagesA Design Technique For Microstrip Filters: January 2009yyryNo ratings yet
- Influence of The Magnetic Field Nonuniformity On An X-Band Microstrip Y-Junction Circulator Bandwidth: Theory/Experiment ComparisonDocument3 pagesInfluence of The Magnetic Field Nonuniformity On An X-Band Microstrip Y-Junction Circulator Bandwidth: Theory/Experiment Comparisonjax almarNo ratings yet
- A Resonant Tuning Fork Force Sensor With Unprecedented Combination of Resolution and RangeDocument4 pagesA Resonant Tuning Fork Force Sensor With Unprecedented Combination of Resolution and RangesdfjshNo ratings yet
- Frequency Measurement in A Time Varying Single Phase Power System Using Signal Processing MethodsDocument5 pagesFrequency Measurement in A Time Varying Single Phase Power System Using Signal Processing MethodsSupriyaNo ratings yet
- Mezaal 2016Document4 pagesMezaal 2016Ahlam BOUANINo ratings yet
- Design and Performance Analysis of An Ultra-Low Voltage (VDD) CMOS Ring Oscillator IEEE 2019Document10 pagesDesign and Performance Analysis of An Ultra-Low Voltage (VDD) CMOS Ring Oscillator IEEE 2019Mary Jane MalibiranNo ratings yet
- Harshey PaperDocument5 pagesHarshey PaperJYOTI PRAKASHNo ratings yet
- A Modified Cable Formalism For Modeling Neuronal Membranes at High FrequenciesDocument25 pagesA Modified Cable Formalism For Modeling Neuronal Membranes at High Frequenciesdzh12345No ratings yet
- High-Frequency Modeling of Power Transformers For Use in Frequency Response Analysis (FRA)Document8 pagesHigh-Frequency Modeling of Power Transformers For Use in Frequency Response Analysis (FRA)alireza shaNo ratings yet
- Compact Low Pass Filter Design For L-Band Application: Dhirendra Kumar, Asok deDocument3 pagesCompact Low Pass Filter Design For L-Band Application: Dhirendra Kumar, Asok deWan LynnNo ratings yet
- Lee 1994Document2 pagesLee 1994sam meNo ratings yet
- Small Microstrip Patch AntennaDocument2 pagesSmall Microstrip Patch Antenna正气歌No ratings yet
- Ding 1999 0167Document3 pagesDing 1999 0167Particle Beam Physics LabNo ratings yet
- Emt 1Document6 pagesEmt 1johnny SalazarNo ratings yet
- A Simple Method For On-Chip, Sub-Femto Farad Interconnect Capacitance MeasurementDocument3 pagesA Simple Method For On-Chip, Sub-Femto Farad Interconnect Capacitance MeasurementAlex WongNo ratings yet
- Design and Analysis of A Coaxial Coupler For A 35-Ghz Gyroklystron AmplifierDocument12 pagesDesign and Analysis of A Coaxial Coupler For A 35-Ghz Gyroklystron Amplifiervenky ginduNo ratings yet
- An Electromagnetic Model For Transients in Grounding SystemsDocument9 pagesAn Electromagnetic Model For Transients in Grounding SystemsObatai KhanNo ratings yet
- Electricity in Near Field Part 1Document11 pagesElectricity in Near Field Part 1jedusableNo ratings yet
- BTP Presentation - Sem 8Document24 pagesBTP Presentation - Sem 8Nihal MohammedNo ratings yet
- DML Theory and PracticeDocument7 pagesDML Theory and PracticeGoh Chin YuanNo ratings yet
- ACES Journal Paper GuidelinesDocument10 pagesACES Journal Paper GuidelinesHejer nasriNo ratings yet
- Power Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringFrom EverandPower Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringNo ratings yet
- Apple Serial Number Info - Decode Your Mac's Serial Number!Document1 pageApple Serial Number Info - Decode Your Mac's Serial Number!edp8 malsbyNo ratings yet
- Construction Terms - English-FilipinoDocument1 pageConstruction Terms - English-FilipinoRhomayne Triz LapuzNo ratings yet
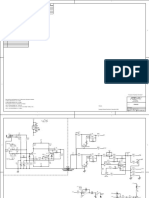
- Peavey Xr8000 SCHDocument12 pagesPeavey Xr8000 SCHLisandro Orrego SalvadorNo ratings yet
- General Twin Seal 06Document24 pagesGeneral Twin Seal 06Gk GaneshNo ratings yet
- Hus3-C M8 Bolt For Brick WallDocument22 pagesHus3-C M8 Bolt For Brick WallANGEL MUÑOZNo ratings yet
- Urinary SystemDocument9 pagesUrinary SystemMary Joyce RamosNo ratings yet
- Music Therapy When Death Is Imminent - A Phenomenological InquiryDocument32 pagesMusic Therapy When Death Is Imminent - A Phenomenological InquiryJuan Luis Köstner MartinoNo ratings yet
- Min Pin Sweater Paradise - Autumn Stripes Crochet Min Pin SweaterDocument6 pagesMin Pin Sweater Paradise - Autumn Stripes Crochet Min Pin SweaterNathalyaNo ratings yet
- 2012 Training Materials PDFDocument32 pages2012 Training Materials PDFWisam Ankah100% (1)
- Essay Types Character Analysis EssayDocument7 pagesEssay Types Character Analysis EssayFatihNo ratings yet
- WoPhO 2012 Q9Document5 pagesWoPhO 2012 Q9Mohammed AlsawafiNo ratings yet
- Turbodrain EnglDocument8 pagesTurbodrain EnglIonut BuzescuNo ratings yet
- Smoke Alarm User's Guide: For Model: PI2010Document16 pagesSmoke Alarm User's Guide: For Model: PI2010goawayNo ratings yet
- Bas920 DatasheetDocument5 pagesBas920 Datasheetd_macuraNo ratings yet
- 19 - Bearing Capacity - Eccentric LoadingDocument5 pages19 - Bearing Capacity - Eccentric LoadinghiyeonNo ratings yet
- DNV-CG-0037 2021-11Document74 pagesDNV-CG-0037 2021-11wfxNo ratings yet
- MN402 01Document22 pagesMN402 01UnknownNo ratings yet
- EASE Module 1 Geometry of Shape and SizeDocument27 pagesEASE Module 1 Geometry of Shape and Sizemonera mohammad0% (1)
- Basic Monte Carlo TechniquesDocument10 pagesBasic Monte Carlo TechniquesMobeen AhmadNo ratings yet
- 2021 - 1 - Alternative Sampling Arrangement For Chemical Composition Tests For General Acceptance (GA) ApplicationDocument5 pages2021 - 1 - Alternative Sampling Arrangement For Chemical Composition Tests For General Acceptance (GA) Applicationkumshing88cwNo ratings yet
- Covellite PDFDocument1 pageCovellite PDFRyoga RizkyNo ratings yet
- Serial Adder Mealy Modelling ProgramDocument22 pagesSerial Adder Mealy Modelling ProgrambcemailidNo ratings yet
- ISEN 330 Final Exam ReviewDocument2 pagesISEN 330 Final Exam ReviewDaniel MedranoNo ratings yet
- Project Documentation SandeepDocument19 pagesProject Documentation SandeepFYIT80Sultan ShaikhNo ratings yet
- Motion Information and MediaDocument39 pagesMotion Information and Mediajadeshades12No ratings yet
- Maersk IntrepidDocument8 pagesMaersk Intrepidrickyngs100% (1)
- EN ISO 13503-2 (2006) (E) CodifiedDocument8 pagesEN ISO 13503-2 (2006) (E) CodifiedEzgi PelitNo ratings yet
- IEE Checklist InstructionsDocument20 pagesIEE Checklist InstructionsBalaji_Rajaman_2280No ratings yet