
Study of Contact Load On Cycloid Wheel of RV Reducer Based On Matlab
Study of Contact Load On Cycloid Wheel of RV Reducer Based On Matlab
You might also like
- Awf8f45 Tech InfoDocument27 pagesAwf8f45 Tech Infoalexp50No ratings yet
- SM PC300-8 SN01983-01Document44 pagesSM PC300-8 SN01983-01aldy yasi79% (14)
- Vecchiato 2001Document22 pagesVecchiato 2001Lucas DuarteNo ratings yet
- F4A4x at Manual PDFDocument135 pagesF4A4x at Manual PDFDener Rogerio Dos SantosNo ratings yet
- Stress and Strain State of Single - Stage Cycloidal Speed ReducerDocument6 pagesStress and Strain State of Single - Stage Cycloidal Speed ReducerdimtecNo ratings yet
- Modelling and Vibration Analysis of Misaligned Rotor-Ball Bearing SystemsDocument16 pagesModelling and Vibration Analysis of Misaligned Rotor-Ball Bearing Systemsmanjunath k sNo ratings yet
- In Uence of The Friction On The Cycloidal Speed Reducer EfficiencyDocument12 pagesIn Uence of The Friction On The Cycloidal Speed Reducer EfficiencydimtecNo ratings yet
- Gibbs & Apell EquationsDocument9 pagesGibbs & Apell EquationsYeizerNo ratings yet
- Identification of Weighted Additive Stiffness Coefficients in Coupled Jeffcott Rotors Integrated With AMB in The Presence of Angular MisalignmentDocument12 pagesIdentification of Weighted Additive Stiffness Coefficients in Coupled Jeffcott Rotors Integrated With AMB in The Presence of Angular MisalignmentSivaRSNo ratings yet
- Vibration Analysis of A Cracked Rotor Surrounded by Viscous LiquidDocument30 pagesVibration Analysis of A Cracked Rotor Surrounded by Viscous LiquidAnkit MNo ratings yet
- Stiffness Simulation of Joints of Large Manipulators Based On Cam Torsion Spring MechanismsDocument10 pagesStiffness Simulation of Joints of Large Manipulators Based On Cam Torsion Spring MechanismsashnekNo ratings yet
- A New Numerical Force Analysis Method of CBR ReducDocument9 pagesA New Numerical Force Analysis Method of CBR ReducMaksat TemirkhanNo ratings yet
- Bahan 1Document19 pagesBahan 1Harry RamzaNo ratings yet
- Simulation Analysis of Petroleum Premium Casing Connection: Procedia EngineeringDocument8 pagesSimulation Analysis of Petroleum Premium Casing Connection: Procedia EngineeringWilliam OmgbaNo ratings yet
- Simple Explicit Formulae For Calculating Limit Dimensions To Avoid Undercutting in The Rotor of A Cycloid Rotor PumpDocument10 pagesSimple Explicit Formulae For Calculating Limit Dimensions To Avoid Undercutting in The Rotor of A Cycloid Rotor PumpLucas DuarteNo ratings yet
- The Design and Prototype Manufacture of A Planetary Gear ReducerDocument5 pagesThe Design and Prototype Manufacture of A Planetary Gear ReducerRenato LPNo ratings yet
- Finite Element Analysis of The Dynamic Contact Stress of Cycloid Gear of RV Reducer, WEI Ling HuiDocument6 pagesFinite Element Analysis of The Dynamic Contact Stress of Cycloid Gear of RV Reducer, WEI Ling Huii.christianNo ratings yet
- Numerical Gerotor DesignDocument18 pagesNumerical Gerotor Designsardhan.rajender84No ratings yet
- Note These Points - : Even If Not AskedDocument68 pagesNote These Points - : Even If Not Askedvibhakar4uNo ratings yet
- A Kinematic Analysis of The Valve Timing Mechanism With Three Elements and Continuous Valve LiftDocument6 pagesA Kinematic Analysis of The Valve Timing Mechanism With Three Elements and Continuous Valve LiftIan MannNo ratings yet
- Exact Solutions of Interference Fit of A High-Speed Coupling For Micro Gas TurbineDocument7 pagesExact Solutions of Interference Fit of A High-Speed Coupling For Micro Gas TurbinesenthilNo ratings yet
- Class XI Physics DPP Set (23) - Previous Chaps + Rotational MotionDocument21 pagesClass XI Physics DPP Set (23) - Previous Chaps + Rotational MotionNilabha DasNo ratings yet
- Radius NCGDocument11 pagesRadius NCGihaNo ratings yet
- T-23 System of ParticlesDocument3 pagesT-23 System of ParticlesShashi Shekhar TripathiNo ratings yet
- ABB Redundant Drive With DTC and Dual-Star Synchronous MachineDocument10 pagesABB Redundant Drive With DTC and Dual-Star Synchronous MachineSilvestarNo ratings yet
- A Microscopic Nuclear Collective Rotation-Vibration Model 2D SubmodelDocument12 pagesA Microscopic Nuclear Collective Rotation-Vibration Model 2D SubmodelbinifsNo ratings yet
- Sis 2.0 PDFDocument4 pagesSis 2.0 PDFDahi Med100% (1)
- Great Circle Route and Its Plotting On Chart ProjeDocument8 pagesGreat Circle Route and Its Plotting On Chart ProjeEka Juang SantikaNo ratings yet
- Kinematic Analysis of Mechanism For Converting Rotational Motion Into Reciprocating Rotational MotionDocument6 pagesKinematic Analysis of Mechanism For Converting Rotational Motion Into Reciprocating Rotational MotionRockerss RockerssNo ratings yet
- Stability Analysis of Constrained Conveyor ChainDocument4 pagesStability Analysis of Constrained Conveyor ChainmaartenNo ratings yet
- Sambhav Test Answer Key 25.07.2023Document12 pagesSambhav Test Answer Key 25.07.2023Shreya VarmaNo ratings yet
- Internal Gear Pump DesignDocument14 pagesInternal Gear Pump Designafriyan.inbox capcxNo ratings yet
- Mechanisms Chap 10 - Determining The Cam Profile - Analytical Methodv4Document28 pagesMechanisms Chap 10 - Determining The Cam Profile - Analytical Methodv4劉德信No ratings yet
- Buckling of Annular Orthotropic Plates: KORUS'99 MechanicsDocument4 pagesBuckling of Annular Orthotropic Plates: KORUS'99 Mechanicsyaser yasNo ratings yet
- Sankalp Sheet - 7 Lectures 11: ATOMIC STRUCTURE Schrödinger's Wave Equation, Plots of (Probability of Finding E), R, R, 4 - RDocument2 pagesSankalp Sheet - 7 Lectures 11: ATOMIC STRUCTURE Schrödinger's Wave Equation, Plots of (Probability of Finding E), R, R, 4 - RGcgNo ratings yet
- Approximation of Optimal Profile of Rolling Bearings Cylindrical RollersDocument15 pagesApproximation of Optimal Profile of Rolling Bearings Cylindrical Rollersmans2014No ratings yet
- EX0703Document3 pagesEX0703igualdi53No ratings yet
- Comparative Study On Stability Theory of Steel-Concrete Composite Beams in Negative Moment Region Based On ABAQUSDocument9 pagesComparative Study On Stability Theory of Steel-Concrete Composite Beams in Negative Moment Region Based On ABAQUSJorge PalominoNo ratings yet
- 02.GTA-02 (p1) Key & Solutions BT1Document10 pages02.GTA-02 (p1) Key & Solutions BT1Motivational BabaNo ratings yet
- Nonlinear Dynamics Model of Transversal Cracked Rotor System and Its Matlab ImplementationDocument5 pagesNonlinear Dynamics Model of Transversal Cracked Rotor System and Its Matlab ImplementationNirmal KushwahaNo ratings yet
- The Problem of Optimum Design of Composite Housings of Solid Propellant Rocket Engines-Razin2018Document9 pagesThe Problem of Optimum Design of Composite Housings of Solid Propellant Rocket Engines-Razin2018Hiến Đinh VănNo ratings yet
- 7.1 Resolver PrinciplesDocument10 pages7.1 Resolver PrinciplesJelena Blagojevic-IgnjatovicNo ratings yet
- DPP 69 Rotation 16-11-2022Document2 pagesDPP 69 Rotation 16-11-2022neoisonlyoneNo ratings yet
- CLS Aipmt 19 20 XIII Phy Study Package 1 Level 1 Chapter 7Document38 pagesCLS Aipmt 19 20 XIII Phy Study Package 1 Level 1 Chapter 7manas dhallaNo ratings yet
- Salient Pole Permanent Magnet Axial-Gap Self-Bearing Motor: Quang-Dich Nguyen and Satoshi UenoDocument25 pagesSalient Pole Permanent Magnet Axial-Gap Self-Bearing Motor: Quang-Dich Nguyen and Satoshi Uenoharis shehzadNo ratings yet
- 1 s2.0 S1876619614000710 MainDocument7 pages1 s2.0 S1876619614000710 Mainsomuch missingNo ratings yet
- Physics Circular MotionDocument6 pagesPhysics Circular MotionNethra SasikumarNo ratings yet
- Back Emf Calculations For Axial-Gap Permanent Magnet Synchronous MotorsDocument7 pagesBack Emf Calculations For Axial-Gap Permanent Magnet Synchronous Motorsyasserali.1041992No ratings yet
- Vibration of Circular Membranes With Linearlyvarying Densityalong A DiameterDocument8 pagesVibration of Circular Membranes With Linearlyvarying Densityalong A Diametereren onatNo ratings yet
- 26th Feb - Physics - Shift-1Document19 pages26th Feb - Physics - Shift-1totalrcksNo ratings yet
- Multi-Satellite Missions: February, 2019Document41 pagesMulti-Satellite Missions: February, 2019Alexander HarlanNo ratings yet
- Physics - Circular 1234Document4 pagesPhysics - Circular 1234aparna.basu123456No ratings yet
- DPP 69 Rotation 16-11-2022 - ANSDocument2 pagesDPP 69 Rotation 16-11-2022 - ANSneoisonlyoneNo ratings yet
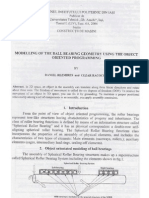
- Modelling The Ball Bearing Geometry Using The Object Oriented ProgrammingDocument6 pagesModelling The Ball Bearing Geometry Using The Object Oriented Programmingdaniel rezmiresNo ratings yet
- Crystal Field Activation EnergyDocument5 pagesCrystal Field Activation EnergyBukhariNo ratings yet
- Transport Phenomena Fluid Mechanics Problem Solution BSL - Parabolic Mirror Fabrication From Free Surface Shape of Rotating LiquidDocument5 pagesTransport Phenomena Fluid Mechanics Problem Solution BSL - Parabolic Mirror Fabrication From Free Surface Shape of Rotating LiquidyudhaputraNo ratings yet
- Control Study On The CVT Metal V-Belt's Axial-Misalignment of CarDocument5 pagesControl Study On The CVT Metal V-Belt's Axial-Misalignment of CarLalit PatilNo ratings yet
- Control Study On The CVT Metal V-Belt's Axial-Misalignment of CarDocument5 pagesControl Study On The CVT Metal V-Belt's Axial-Misalignment of CarLalit PatilNo ratings yet
- Performance Analysis For Francis Hydraulic Turbine Based On Normalized Operating Condition and Its ApplicationDocument6 pagesPerformance Analysis For Francis Hydraulic Turbine Based On Normalized Operating Condition and Its Applicationriddhesh gandreNo ratings yet
- Nomin-Erdene 2019 IOP Conf. Ser. Mater. Sci. Eng. 704 012008Document7 pagesNomin-Erdene 2019 IOP Conf. Ser. Mater. Sci. Eng. 704 012008NomioAnneNo ratings yet
- Kinematics and Dynamics Analysis of The Main MotioDocument9 pagesKinematics and Dynamics Analysis of The Main MotiosbkjasbfaskjfbjkNo ratings yet
- Computational Liquid Crystal Photonics: Fundamentals, Modelling and ApplicationsFrom EverandComputational Liquid Crystal Photonics: Fundamentals, Modelling and ApplicationsNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Adaptive Force-Based Control For Legged RobotsDocument8 pagesAdaptive Force-Based Control For Legged RobotsdimtecNo ratings yet
- 2020 Ral BjelonicDocument8 pages2020 Ral BjelonicdimtecNo ratings yet
- Mesh Force Modelling and Parametric Studies For Compound Oscillatory Roller ReducerDocument18 pagesMesh Force Modelling and Parametric Studies For Compound Oscillatory Roller ReducerdimtecNo ratings yet
- Stress and Strain State of Single - Stage Cycloidal Speed ReducerDocument6 pagesStress and Strain State of Single - Stage Cycloidal Speed ReducerdimtecNo ratings yet
- Spurhelical GearsDocument18 pagesSpurhelical GearsdimtecNo ratings yet
- How To Draw Involute Bevel GearDocument2 pagesHow To Draw Involute Bevel GeardimtecNo ratings yet
- Mapa Físico AméricaDocument2 pagesMapa Físico AméricadimtecNo ratings yet
- How Differential WorksDocument23 pagesHow Differential WorksVishesh JainNo ratings yet
- PC130-8 SEN03763-10 Structure, Function & Maintenance StandardDocument168 pagesPC130-8 SEN03763-10 Structure, Function & Maintenance StandarddatphuongNo ratings yet
- Volvo Gear Actuator: Design - Function - RepairDocument76 pagesVolvo Gear Actuator: Design - Function - RepairNadeem Mohd100% (2)
- APEX DYNAMICS PLANETARY GEARBOX CompressedDocument23 pagesAPEX DYNAMICS PLANETARY GEARBOX CompressedDioNo ratings yet
- Service Guide For Warn Pullzall 120vac P/N 885000 & 885001: Repair / Replacement Instructions Trouble Shooting GuideDocument48 pagesService Guide For Warn Pullzall 120vac P/N 885000 & 885001: Repair / Replacement Instructions Trouble Shooting GuideshulistNo ratings yet
- Electric Hub MotorDocument6 pagesElectric Hub Motorirctcsbt6bimblikipilNo ratings yet
- MAAG GEAR - Techinal and Commercial Considerations Related To The Cement Mill ProductionDocument43 pagesMAAG GEAR - Techinal and Commercial Considerations Related To The Cement Mill Productionrecai100% (1)
- Etk 002 en deDocument266 pagesEtk 002 en dealin grecuNo ratings yet
- Automotive TransmissionDocument146 pagesAutomotive TransmissionTony Neal100% (1)
- ZF 6HP26X LR Description and OperationDocument47 pagesZF 6HP26X LR Description and Operationcoral4him100% (5)
- HEXAGON Info 157 May / June 2016Document13 pagesHEXAGON Info 157 May / June 2016jojoNo ratings yet
- Problemas de EngranesDocument18 pagesProblemas de EngranesStratowarionNo ratings yet
- Asm 0024eDocument248 pagesAsm 0024eAurimas BendinskasNo ratings yet
- ZF4HP16 Transmisión OptraDocument21 pagesZF4HP16 Transmisión Optrabolivar_matilde147No ratings yet
- Terex PegsonDocument12 pagesTerex PegsonJose GimenezNo ratings yet
- Spare Parts List Catalogo Parti Di Ricambio: AXLE 20.29 ASSALE 20.29Document9 pagesSpare Parts List Catalogo Parti Di Ricambio: AXLE 20.29 ASSALE 20.29Oskars RozefeldsNo ratings yet
- Automotive Transmission NewDocument147 pagesAutomotive Transmission NewhodvmkvecautoNo ratings yet
- Automatic Transaxle Assy (U34#E Series) : OverhaulDocument46 pagesAutomatic Transaxle Assy (U34#E Series) : Overhaulvipper king2012No ratings yet
- Gearmotors: Achieving The Perfect Motor & Gearbox Match: Deeper InsightsDocument16 pagesGearmotors: Achieving The Perfect Motor & Gearbox Match: Deeper InsightsRadu BadoiuNo ratings yet
- Partmaster AmgDocument1,132 pagesPartmaster Amgashish kumarNo ratings yet
- Arbeitsblatt Mechanic Static EnglischDocument57 pagesArbeitsblatt Mechanic Static EnglischSVR07No ratings yet
- Spare Parts Catalogue: AXLE 143841 REF: 143841Document8 pagesSpare Parts Catalogue: AXLE 143841 REF: 143841avant comercialNo ratings yet
- ME18 Lec6 - Gear TrainsDocument28 pagesME18 Lec6 - Gear TrainsAdriel JohnNo ratings yet
- ZF 02262014-PartsDocument49 pagesZF 02262014-PartsAnonymous leTHP8100% (1)
- Wind Turbine Gearboxes - 2015Document73 pagesWind Turbine Gearboxes - 2015diegodisouza100% (1)
- Gear Production Suite BrochureDocument8 pagesGear Production Suite BrochureDontyneSystems100% (1)
- Stress and Design Analysis of Triple Reduction Gearbox CasingDocument6 pagesStress and Design Analysis of Triple Reduction Gearbox CasingIJIRSTNo ratings yet






























































































Download as pdf or txt
You might also like
- Awf8f45 Tech InfoDocument27 pagesAwf8f45 Tech Infoalexp50No ratings yet
- SM PC300-8 SN01983-01Document44 pagesSM PC300-8 SN01983-01aldy yasi79% (14)
- Vecchiato 2001Document22 pagesVecchiato 2001Lucas DuarteNo ratings yet
- F4A4x at Manual PDFDocument135 pagesF4A4x at Manual PDFDener Rogerio Dos SantosNo ratings yet
- Stress and Strain State of Single - Stage Cycloidal Speed ReducerDocument6 pagesStress and Strain State of Single - Stage Cycloidal Speed ReducerdimtecNo ratings yet
- Modelling and Vibration Analysis of Misaligned Rotor-Ball Bearing SystemsDocument16 pagesModelling and Vibration Analysis of Misaligned Rotor-Ball Bearing Systemsmanjunath k sNo ratings yet
- In Uence of The Friction On The Cycloidal Speed Reducer EfficiencyDocument12 pagesIn Uence of The Friction On The Cycloidal Speed Reducer EfficiencydimtecNo ratings yet
- Gibbs & Apell EquationsDocument9 pagesGibbs & Apell EquationsYeizerNo ratings yet
- Identification of Weighted Additive Stiffness Coefficients in Coupled Jeffcott Rotors Integrated With AMB in The Presence of Angular MisalignmentDocument12 pagesIdentification of Weighted Additive Stiffness Coefficients in Coupled Jeffcott Rotors Integrated With AMB in The Presence of Angular MisalignmentSivaRSNo ratings yet
- Vibration Analysis of A Cracked Rotor Surrounded by Viscous LiquidDocument30 pagesVibration Analysis of A Cracked Rotor Surrounded by Viscous LiquidAnkit MNo ratings yet
- Stiffness Simulation of Joints of Large Manipulators Based On Cam Torsion Spring MechanismsDocument10 pagesStiffness Simulation of Joints of Large Manipulators Based On Cam Torsion Spring MechanismsashnekNo ratings yet
- A New Numerical Force Analysis Method of CBR ReducDocument9 pagesA New Numerical Force Analysis Method of CBR ReducMaksat TemirkhanNo ratings yet
- Bahan 1Document19 pagesBahan 1Harry RamzaNo ratings yet
- Simulation Analysis of Petroleum Premium Casing Connection: Procedia EngineeringDocument8 pagesSimulation Analysis of Petroleum Premium Casing Connection: Procedia EngineeringWilliam OmgbaNo ratings yet
- Simple Explicit Formulae For Calculating Limit Dimensions To Avoid Undercutting in The Rotor of A Cycloid Rotor PumpDocument10 pagesSimple Explicit Formulae For Calculating Limit Dimensions To Avoid Undercutting in The Rotor of A Cycloid Rotor PumpLucas DuarteNo ratings yet
- The Design and Prototype Manufacture of A Planetary Gear ReducerDocument5 pagesThe Design and Prototype Manufacture of A Planetary Gear ReducerRenato LPNo ratings yet
- Finite Element Analysis of The Dynamic Contact Stress of Cycloid Gear of RV Reducer, WEI Ling HuiDocument6 pagesFinite Element Analysis of The Dynamic Contact Stress of Cycloid Gear of RV Reducer, WEI Ling Huii.christianNo ratings yet
- Numerical Gerotor DesignDocument18 pagesNumerical Gerotor Designsardhan.rajender84No ratings yet
- Note These Points - : Even If Not AskedDocument68 pagesNote These Points - : Even If Not Askedvibhakar4uNo ratings yet
- A Kinematic Analysis of The Valve Timing Mechanism With Three Elements and Continuous Valve LiftDocument6 pagesA Kinematic Analysis of The Valve Timing Mechanism With Three Elements and Continuous Valve LiftIan MannNo ratings yet
- Exact Solutions of Interference Fit of A High-Speed Coupling For Micro Gas TurbineDocument7 pagesExact Solutions of Interference Fit of A High-Speed Coupling For Micro Gas TurbinesenthilNo ratings yet
- Class XI Physics DPP Set (23) - Previous Chaps + Rotational MotionDocument21 pagesClass XI Physics DPP Set (23) - Previous Chaps + Rotational MotionNilabha DasNo ratings yet
- Radius NCGDocument11 pagesRadius NCGihaNo ratings yet
- T-23 System of ParticlesDocument3 pagesT-23 System of ParticlesShashi Shekhar TripathiNo ratings yet
- ABB Redundant Drive With DTC and Dual-Star Synchronous MachineDocument10 pagesABB Redundant Drive With DTC and Dual-Star Synchronous MachineSilvestarNo ratings yet
- A Microscopic Nuclear Collective Rotation-Vibration Model 2D SubmodelDocument12 pagesA Microscopic Nuclear Collective Rotation-Vibration Model 2D SubmodelbinifsNo ratings yet
- Sis 2.0 PDFDocument4 pagesSis 2.0 PDFDahi Med100% (1)
- Great Circle Route and Its Plotting On Chart ProjeDocument8 pagesGreat Circle Route and Its Plotting On Chart ProjeEka Juang SantikaNo ratings yet
- Kinematic Analysis of Mechanism For Converting Rotational Motion Into Reciprocating Rotational MotionDocument6 pagesKinematic Analysis of Mechanism For Converting Rotational Motion Into Reciprocating Rotational MotionRockerss RockerssNo ratings yet
- Stability Analysis of Constrained Conveyor ChainDocument4 pagesStability Analysis of Constrained Conveyor ChainmaartenNo ratings yet
- Sambhav Test Answer Key 25.07.2023Document12 pagesSambhav Test Answer Key 25.07.2023Shreya VarmaNo ratings yet
- Internal Gear Pump DesignDocument14 pagesInternal Gear Pump Designafriyan.inbox capcxNo ratings yet
- Mechanisms Chap 10 - Determining The Cam Profile - Analytical Methodv4Document28 pagesMechanisms Chap 10 - Determining The Cam Profile - Analytical Methodv4劉德信No ratings yet
- Buckling of Annular Orthotropic Plates: KORUS'99 MechanicsDocument4 pagesBuckling of Annular Orthotropic Plates: KORUS'99 Mechanicsyaser yasNo ratings yet
- Sankalp Sheet - 7 Lectures 11: ATOMIC STRUCTURE Schrödinger's Wave Equation, Plots of (Probability of Finding E), R, R, 4 - RDocument2 pagesSankalp Sheet - 7 Lectures 11: ATOMIC STRUCTURE Schrödinger's Wave Equation, Plots of (Probability of Finding E), R, R, 4 - RGcgNo ratings yet
- Approximation of Optimal Profile of Rolling Bearings Cylindrical RollersDocument15 pagesApproximation of Optimal Profile of Rolling Bearings Cylindrical Rollersmans2014No ratings yet
- EX0703Document3 pagesEX0703igualdi53No ratings yet
- Comparative Study On Stability Theory of Steel-Concrete Composite Beams in Negative Moment Region Based On ABAQUSDocument9 pagesComparative Study On Stability Theory of Steel-Concrete Composite Beams in Negative Moment Region Based On ABAQUSJorge PalominoNo ratings yet
- 02.GTA-02 (p1) Key & Solutions BT1Document10 pages02.GTA-02 (p1) Key & Solutions BT1Motivational BabaNo ratings yet
- Nonlinear Dynamics Model of Transversal Cracked Rotor System and Its Matlab ImplementationDocument5 pagesNonlinear Dynamics Model of Transversal Cracked Rotor System and Its Matlab ImplementationNirmal KushwahaNo ratings yet
- The Problem of Optimum Design of Composite Housings of Solid Propellant Rocket Engines-Razin2018Document9 pagesThe Problem of Optimum Design of Composite Housings of Solid Propellant Rocket Engines-Razin2018Hiến Đinh VănNo ratings yet
- 7.1 Resolver PrinciplesDocument10 pages7.1 Resolver PrinciplesJelena Blagojevic-IgnjatovicNo ratings yet
- DPP 69 Rotation 16-11-2022Document2 pagesDPP 69 Rotation 16-11-2022neoisonlyoneNo ratings yet
- CLS Aipmt 19 20 XIII Phy Study Package 1 Level 1 Chapter 7Document38 pagesCLS Aipmt 19 20 XIII Phy Study Package 1 Level 1 Chapter 7manas dhallaNo ratings yet
- Salient Pole Permanent Magnet Axial-Gap Self-Bearing Motor: Quang-Dich Nguyen and Satoshi UenoDocument25 pagesSalient Pole Permanent Magnet Axial-Gap Self-Bearing Motor: Quang-Dich Nguyen and Satoshi Uenoharis shehzadNo ratings yet
- 1 s2.0 S1876619614000710 MainDocument7 pages1 s2.0 S1876619614000710 Mainsomuch missingNo ratings yet
- Physics Circular MotionDocument6 pagesPhysics Circular MotionNethra SasikumarNo ratings yet
- Back Emf Calculations For Axial-Gap Permanent Magnet Synchronous MotorsDocument7 pagesBack Emf Calculations For Axial-Gap Permanent Magnet Synchronous Motorsyasserali.1041992No ratings yet
- Vibration of Circular Membranes With Linearlyvarying Densityalong A DiameterDocument8 pagesVibration of Circular Membranes With Linearlyvarying Densityalong A Diametereren onatNo ratings yet
- 26th Feb - Physics - Shift-1Document19 pages26th Feb - Physics - Shift-1totalrcksNo ratings yet
- Multi-Satellite Missions: February, 2019Document41 pagesMulti-Satellite Missions: February, 2019Alexander HarlanNo ratings yet
- Physics - Circular 1234Document4 pagesPhysics - Circular 1234aparna.basu123456No ratings yet
- DPP 69 Rotation 16-11-2022 - ANSDocument2 pagesDPP 69 Rotation 16-11-2022 - ANSneoisonlyoneNo ratings yet
- Modelling The Ball Bearing Geometry Using The Object Oriented ProgrammingDocument6 pagesModelling The Ball Bearing Geometry Using The Object Oriented Programmingdaniel rezmiresNo ratings yet
- Crystal Field Activation EnergyDocument5 pagesCrystal Field Activation EnergyBukhariNo ratings yet
- Transport Phenomena Fluid Mechanics Problem Solution BSL - Parabolic Mirror Fabrication From Free Surface Shape of Rotating LiquidDocument5 pagesTransport Phenomena Fluid Mechanics Problem Solution BSL - Parabolic Mirror Fabrication From Free Surface Shape of Rotating LiquidyudhaputraNo ratings yet
- Control Study On The CVT Metal V-Belt's Axial-Misalignment of CarDocument5 pagesControl Study On The CVT Metal V-Belt's Axial-Misalignment of CarLalit PatilNo ratings yet
- Control Study On The CVT Metal V-Belt's Axial-Misalignment of CarDocument5 pagesControl Study On The CVT Metal V-Belt's Axial-Misalignment of CarLalit PatilNo ratings yet
- Performance Analysis For Francis Hydraulic Turbine Based On Normalized Operating Condition and Its ApplicationDocument6 pagesPerformance Analysis For Francis Hydraulic Turbine Based On Normalized Operating Condition and Its Applicationriddhesh gandreNo ratings yet
- Nomin-Erdene 2019 IOP Conf. Ser. Mater. Sci. Eng. 704 012008Document7 pagesNomin-Erdene 2019 IOP Conf. Ser. Mater. Sci. Eng. 704 012008NomioAnneNo ratings yet
- Kinematics and Dynamics Analysis of The Main MotioDocument9 pagesKinematics and Dynamics Analysis of The Main MotiosbkjasbfaskjfbjkNo ratings yet
- Computational Liquid Crystal Photonics: Fundamentals, Modelling and ApplicationsFrom EverandComputational Liquid Crystal Photonics: Fundamentals, Modelling and ApplicationsNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Adaptive Force-Based Control For Legged RobotsDocument8 pagesAdaptive Force-Based Control For Legged RobotsdimtecNo ratings yet
- 2020 Ral BjelonicDocument8 pages2020 Ral BjelonicdimtecNo ratings yet
- Mesh Force Modelling and Parametric Studies For Compound Oscillatory Roller ReducerDocument18 pagesMesh Force Modelling and Parametric Studies For Compound Oscillatory Roller ReducerdimtecNo ratings yet
- Stress and Strain State of Single - Stage Cycloidal Speed ReducerDocument6 pagesStress and Strain State of Single - Stage Cycloidal Speed ReducerdimtecNo ratings yet
- Spurhelical GearsDocument18 pagesSpurhelical GearsdimtecNo ratings yet
- How To Draw Involute Bevel GearDocument2 pagesHow To Draw Involute Bevel GeardimtecNo ratings yet
- Mapa Físico AméricaDocument2 pagesMapa Físico AméricadimtecNo ratings yet
- How Differential WorksDocument23 pagesHow Differential WorksVishesh JainNo ratings yet
- PC130-8 SEN03763-10 Structure, Function & Maintenance StandardDocument168 pagesPC130-8 SEN03763-10 Structure, Function & Maintenance StandarddatphuongNo ratings yet
- Volvo Gear Actuator: Design - Function - RepairDocument76 pagesVolvo Gear Actuator: Design - Function - RepairNadeem Mohd100% (2)
- APEX DYNAMICS PLANETARY GEARBOX CompressedDocument23 pagesAPEX DYNAMICS PLANETARY GEARBOX CompressedDioNo ratings yet
- Service Guide For Warn Pullzall 120vac P/N 885000 & 885001: Repair / Replacement Instructions Trouble Shooting GuideDocument48 pagesService Guide For Warn Pullzall 120vac P/N 885000 & 885001: Repair / Replacement Instructions Trouble Shooting GuideshulistNo ratings yet
- Electric Hub MotorDocument6 pagesElectric Hub Motorirctcsbt6bimblikipilNo ratings yet
- MAAG GEAR - Techinal and Commercial Considerations Related To The Cement Mill ProductionDocument43 pagesMAAG GEAR - Techinal and Commercial Considerations Related To The Cement Mill Productionrecai100% (1)
- Etk 002 en deDocument266 pagesEtk 002 en dealin grecuNo ratings yet
- Automotive TransmissionDocument146 pagesAutomotive TransmissionTony Neal100% (1)
- ZF 6HP26X LR Description and OperationDocument47 pagesZF 6HP26X LR Description and Operationcoral4him100% (5)
- HEXAGON Info 157 May / June 2016Document13 pagesHEXAGON Info 157 May / June 2016jojoNo ratings yet
- Problemas de EngranesDocument18 pagesProblemas de EngranesStratowarionNo ratings yet
- Asm 0024eDocument248 pagesAsm 0024eAurimas BendinskasNo ratings yet
- ZF4HP16 Transmisión OptraDocument21 pagesZF4HP16 Transmisión Optrabolivar_matilde147No ratings yet
- Terex PegsonDocument12 pagesTerex PegsonJose GimenezNo ratings yet
- Spare Parts List Catalogo Parti Di Ricambio: AXLE 20.29 ASSALE 20.29Document9 pagesSpare Parts List Catalogo Parti Di Ricambio: AXLE 20.29 ASSALE 20.29Oskars RozefeldsNo ratings yet
- Automotive Transmission NewDocument147 pagesAutomotive Transmission NewhodvmkvecautoNo ratings yet
- Automatic Transaxle Assy (U34#E Series) : OverhaulDocument46 pagesAutomatic Transaxle Assy (U34#E Series) : Overhaulvipper king2012No ratings yet
- Gearmotors: Achieving The Perfect Motor & Gearbox Match: Deeper InsightsDocument16 pagesGearmotors: Achieving The Perfect Motor & Gearbox Match: Deeper InsightsRadu BadoiuNo ratings yet
- Partmaster AmgDocument1,132 pagesPartmaster Amgashish kumarNo ratings yet
- Arbeitsblatt Mechanic Static EnglischDocument57 pagesArbeitsblatt Mechanic Static EnglischSVR07No ratings yet
- Spare Parts Catalogue: AXLE 143841 REF: 143841Document8 pagesSpare Parts Catalogue: AXLE 143841 REF: 143841avant comercialNo ratings yet
- ME18 Lec6 - Gear TrainsDocument28 pagesME18 Lec6 - Gear TrainsAdriel JohnNo ratings yet
- ZF 02262014-PartsDocument49 pagesZF 02262014-PartsAnonymous leTHP8100% (1)
- Wind Turbine Gearboxes - 2015Document73 pagesWind Turbine Gearboxes - 2015diegodisouza100% (1)
- Gear Production Suite BrochureDocument8 pagesGear Production Suite BrochureDontyneSystems100% (1)
- Stress and Design Analysis of Triple Reduction Gearbox CasingDocument6 pagesStress and Design Analysis of Triple Reduction Gearbox CasingIJIRSTNo ratings yet