Download as pdf or txt
You might also like
- Goetia Kids in EnglishDocument219 pagesGoetia Kids in EnglishcristikissNo ratings yet
- 57:020 Mechanics of Fluids and Transport ProcessesDocument5 pages57:020 Mechanics of Fluids and Transport ProcessesWillian CorreaNo ratings yet
- EcohorrorDocument8 pagesEcohorrorRegina GranadosNo ratings yet
- Yellow Fever East Asian Fetish Among Anime Fans OtakusDocument30 pagesYellow Fever East Asian Fetish Among Anime Fans OtakusTazin Khan PromiNo ratings yet
- Astm C270.25146Document14 pagesAstm C270.25146Isabel100% (1)
- Qassim 2021 IOP Conf. Ser. Mater. Sci. Eng. 1094 012101Document9 pagesQassim 2021 IOP Conf. Ser. Mater. Sci. Eng. 1094 012101Huda AlrikabiNo ratings yet
- Kim 2005Document19 pagesKim 2005Giulio PalamàNo ratings yet
- Study On Dynamic Impact Factor of Girder Bridges Due To Vehicle Load ModelDocument14 pagesStudy On Dynamic Impact Factor of Girder Bridges Due To Vehicle Load ModelMr PolashNo ratings yet
- Ijesrt: International Journal of Engineering Sciences & Research TechnologyDocument12 pagesIjesrt: International Journal of Engineering Sciences & Research TechnologyHuda AlrikabiNo ratings yet
- Development of Vehicle Chassis From Novel Materials For Light Weight Electric Shuttles Using Finite Element AnalysisDocument13 pagesDevelopment of Vehicle Chassis From Novel Materials For Light Weight Electric Shuttles Using Finite Element AnalysisSnunkhaem EcharojNo ratings yet
- Optimization of Slab Track DesignDocument15 pagesOptimization of Slab Track Designkim18kaiyooNo ratings yet
- Vehicle Collision With Reinforced Concrete Bridge Columns: June 2015Document11 pagesVehicle Collision With Reinforced Concrete Bridge Columns: June 2015J_BellineNo ratings yet
- Simulation of Vertical Dynamic Vehicle-Track InterDocument26 pagesSimulation of Vertical Dynamic Vehicle-Track InterBARIŞ KalyonNo ratings yet
- Truss Bridge ProjectDocument16 pagesTruss Bridge ProjectChrisYap100% (1)
- Transverse Load Distribution of Skew Cast-In-Place Concrete Multicell Box - Girder Bridges Subjected To Traffic ConditionDocument13 pagesTransverse Load Distribution of Skew Cast-In-Place Concrete Multicell Box - Girder Bridges Subjected To Traffic Conditionyoseph dejeneNo ratings yet
- Derailment-Resistant Performance of Modular Composite Rail Track Slabs.Document31 pagesDerailment-Resistant Performance of Modular Composite Rail Track Slabs.Mohamed Ebrahim MohamedNo ratings yet
- Modeling Simulation and Validation of A Tb41 Crash Test of The h2 w5 B Concrete Vehicle Restraint Sy 47287Document23 pagesModeling Simulation and Validation of A Tb41 Crash Test of The h2 w5 B Concrete Vehicle Restraint Sy 47287Miroslav ZivkovicNo ratings yet
- Effect of Vehicle Speed and Road Surface Roughness On The Impact Factor of Simply Supported Bridges Due To IRC Class A and B LoadingDocument24 pagesEffect of Vehicle Speed and Road Surface Roughness On The Impact Factor of Simply Supported Bridges Due To IRC Class A and B Loadingrdey36886No ratings yet
- Fatigue Life of A Mining Dump Truck...Document9 pagesFatigue Life of A Mining Dump Truck...Esteban FaundezNo ratings yet
- Goicolea LasPalmas CompleteDocument31 pagesGoicolea LasPalmas CompleteAbdulrahman AfabafalNo ratings yet
- Kobe University Repository: KernelDocument27 pagesKobe University Repository: KernelTrầmLãngNo ratings yet
- Cable Stay Bridge ModellingDocument7 pagesCable Stay Bridge ModellingVivek PremjiNo ratings yet
- 033 EUC 019 Sheffield UniversityDocument12 pages033 EUC 019 Sheffield UniversityW Mohd Zailimi AbdullahNo ratings yet
- Alhorani (2020) - Mathematical Models For The Optimal Design of I - and H-Shaped Crane Bridge GirdersDocument16 pagesAlhorani (2020) - Mathematical Models For The Optimal Design of I - and H-Shaped Crane Bridge GirdersGogyNo ratings yet
- Combined Fragility Surface Analysis of Earthquake and Scour Hazards For Bridge ZhiqiangDocument6 pagesCombined Fragility Surface Analysis of Earthquake and Scour Hazards For Bridge ZhiqiangEndless LoveNo ratings yet
- Study of The Effect of Adapter Design On The LoadDocument5 pagesStudy of The Effect of Adapter Design On The LoadChristian GagolaNo ratings yet
- Leaflet No.2Document7 pagesLeaflet No.2Sabra A.S.No ratings yet
- Rahul VyasDocument48 pagesRahul VyasRahul VyasNo ratings yet
- Tarlochan, 2013Document11 pagesTarlochan, 2013Farhan Fachrizal BahriNo ratings yet
- Evaluation of Dynamic Vehicle Axle Loads On Bridges With Different Surface ConditionsDocument23 pagesEvaluation of Dynamic Vehicle Axle Loads On Bridges With Different Surface ConditionsBridge&StructureNo ratings yet
- 1 s2.0 S2214785321036762 MainDocument8 pages1 s2.0 S2214785321036762 MainABHINAV KUMARNo ratings yet
- Comparative Study of RCC T-Beam Bridge By12Document32 pagesComparative Study of RCC T-Beam Bridge By12Pranay ReddyNo ratings yet
- A Mathematical Model To Predict RailwayDocument12 pagesA Mathematical Model To Predict RailwaySergey KotovNo ratings yet
- On Modelling of Simulation Model For Racing Car Frame Torsional Stiffness AnalysisDocument11 pagesOn Modelling of Simulation Model For Racing Car Frame Torsional Stiffness AnalysisB01Aadarsh SharmaNo ratings yet
- Ijret20130213011 PDFDocument8 pagesIjret20130213011 PDFAakash KamthaneNo ratings yet
- Load Model For Bridge Design Code - Canadian Journal of Civil EngineeringDocument15 pagesLoad Model For Bridge Design Code - Canadian Journal of Civil Engineeringg401992No ratings yet
- Analysis of Displacement of A Concrete Barrier OnDocument9 pagesAnalysis of Displacement of A Concrete Barrier OnDyah Nimas Ayu SekartiNo ratings yet
- The Dynamic Response Analysis of Curved Bridge Under The Moving Load, Ren, Jianying, Liu, XingDocument7 pagesThe Dynamic Response Analysis of Curved Bridge Under The Moving Load, Ren, Jianying, Liu, XingHuda AlrikabiNo ratings yet
- Ijciet 06 09 017 PDFDocument16 pagesIjciet 06 09 017 PDFIAEME PublicationNo ratings yet
- Design Optimization of Industrial Portal Frame With Overhead CranesDocument6 pagesDesign Optimization of Industrial Portal Frame With Overhead CranesedurahalimNo ratings yet
- Gonzalez - 2010 - Vehicle Bridge Dynamic Interaction Using Finite Element ModellingDocument27 pagesGonzalez - 2010 - Vehicle Bridge Dynamic Interaction Using Finite Element ModellingTruss ItnNo ratings yet
- Mechanically Fastened Composite Side-Door Impact BeamsDocument11 pagesMechanically Fastened Composite Side-Door Impact BeamsVenugopal kulkarniNo ratings yet
- 3D Finite Element Model As A Tool For Analyzing The Structural Behavior of A Railway TrackDocument8 pages3D Finite Element Model As A Tool For Analyzing The Structural Behavior of A Railway TrackandrelomNo ratings yet
- Ly Thuyet Va ChamDocument12 pagesLy Thuyet Va ChamTiep Tran QuangNo ratings yet
- Explicit ImplicitDocument12 pagesExplicit ImplicitSavalia HardikNo ratings yet
- 111 CR PDFDocument35 pages111 CR PDFfandhiejavanov2009No ratings yet
- 56 CF 284 F 08 Ae 85 C 823448358Document11 pages56 CF 284 F 08 Ae 85 C 823448358Stefan TudoracheNo ratings yet
- An Investigation of Subgrade Differential Settlement On The Dynamic Response of The Vehicle Slab Track SystemDocument26 pagesAn Investigation of Subgrade Differential Settlement On The Dynamic Response of The Vehicle Slab Track SystemAndrew OwenNo ratings yet
- Design Optimization of EOT Crane GirderDocument5 pagesDesign Optimization of EOT Crane Girdermech_abhiNo ratings yet
- Development and Validation of A Model For Predicting Wheel Wear in High-Speed TrainsDocument14 pagesDevelopment and Validation of A Model For Predicting Wheel Wear in High-Speed TrainsEnyew MelesseNo ratings yet
- Study and Analysis of Stress and Pressure Variations On Indian Railway WheelDocument7 pagesStudy and Analysis of Stress and Pressure Variations On Indian Railway WheelBoussalia LatifaNo ratings yet
- Ail 4 3 2009Document20 pagesAil 4 3 2009Matej TomićNo ratings yet
- Review On Most Efficient Innovations in The Field of Bridge Engineering TechnologiesDocument3 pagesReview On Most Efficient Innovations in The Field of Bridge Engineering TechnologiesSajan GodhaviyaNo ratings yet
- Analysis of Non Prismatic Beams in BridgeDocument7 pagesAnalysis of Non Prismatic Beams in BridgeNafeez AhmedNo ratings yet
- A Novel Approach To The Calculation of Pothole-Induced Contact Forces in MDOF Vehicle ModelsDocument36 pagesA Novel Approach To The Calculation of Pothole-Induced Contact Forces in MDOF Vehicle ModelsManjunatha EikilaNo ratings yet
- Comparative Study of RCC T-Beam Bridge byDocument32 pagesComparative Study of RCC T-Beam Bridge byPranay Reddy100% (2)
- Effects of Vibration Located On The Steel Truss BRDocument4 pagesEffects of Vibration Located On The Steel Truss BRZhafran KhatamaNo ratings yet
- Comparison FWD BenkelmanDocument7 pagesComparison FWD BenkelmanAdi ChaktiNo ratings yet
- Analysis of Railway Bridge Steel Sections With Different Type of Trusses For 32.5 Tonne Axle LoadingDocument10 pagesAnalysis of Railway Bridge Steel Sections With Different Type of Trusses For 32.5 Tonne Axle LoadingIJRASETPublicationsNo ratings yet
- Advances in Structural EngineeringDocument12 pagesAdvances in Structural EngineeringSeoyoon JoenNo ratings yet
- Chiana Full Length Paper - Sanjay TiwariDocument11 pagesChiana Full Length Paper - Sanjay Tiwarisanjaymits2No ratings yet
- Computers and Structures: B. Kövesdi, L. DunaiDocument10 pagesComputers and Structures: B. Kövesdi, L. DunaiAsr FlowerNo ratings yet
- Kamil RRA 1Document13 pagesKamil RRA 1P24 Innovation CenterNo ratings yet
- Analysis of Slab Culvert Bridges Using ConventionaDocument7 pagesAnalysis of Slab Culvert Bridges Using Conventionajeeva anandNo ratings yet
- Ijesrt: International Journal of Engineering Sciences & Research TechnologyDocument12 pagesIjesrt: International Journal of Engineering Sciences & Research TechnologyHuda AlrikabiNo ratings yet
- Qassim 2021 IOP Conf. Ser. Mater. Sci. Eng. 1094 012101Document9 pagesQassim 2021 IOP Conf. Ser. Mater. Sci. Eng. 1094 012101Huda AlrikabiNo ratings yet
- Experimental Evaluation of FRP-to-concrete Bond Strength in EBROG Technique For Strengthening Concrete MembersDocument8 pagesExperimental Evaluation of FRP-to-concrete Bond Strength in EBROG Technique For Strengthening Concrete MembersHuda AlrikabiNo ratings yet
- WASHTOGuide 2009Document120 pagesWASHTOGuide 2009Huda AlrikabiNo ratings yet
- The Dynamic Response Analysis of Curved Bridge Under The Moving Load, Ren, Jianying, Liu, XingDocument7 pagesThe Dynamic Response Analysis of Curved Bridge Under The Moving Load, Ren, Jianying, Liu, XingHuda AlrikabiNo ratings yet
- Dynamic Response of Concrete Pavements Under Vehicular LoadsDocument10 pagesDynamic Response of Concrete Pavements Under Vehicular LoadsHuda AlrikabiNo ratings yet
- 10 Chapter5Document12 pages10 Chapter5Huda AlrikabiNo ratings yet
- Computer-Aided Nonlinear Vehicle-Bridge Interaction AnalysisDocument26 pagesComputer-Aided Nonlinear Vehicle-Bridge Interaction AnalysisHuda AlrikabiNo ratings yet
- Final Report A Computer System For Bridge Rating and Fatigue Life AnalysisDocument129 pagesFinal Report A Computer System For Bridge Rating and Fatigue Life AnalysisHuda AlrikabiNo ratings yet
- Load Effect Modelling in Fatigue Design of Composite BridgesDocument100 pagesLoad Effect Modelling in Fatigue Design of Composite BridgesHuda AlrikabiNo ratings yet
- Finite Element Analysis of Concrete Bridge Decks Reinforced With Fiber Reinforced Polymer BarsDocument15 pagesFinite Element Analysis of Concrete Bridge Decks Reinforced With Fiber Reinforced Polymer BarsHuda AlrikabiNo ratings yet
- 4 Aerodynamic Stability of Cable Stayed Bridges SimplifiedDocument4 pages4 Aerodynamic Stability of Cable Stayed Bridges SimplifiedHuda AlrikabiNo ratings yet
- Lecture On AlgebraDocument119 pagesLecture On AlgebraVũ Nguyễn PhanNo ratings yet
- E111 Report 2Document15 pagesE111 Report 2John Carl YomeroNo ratings yet
- 22BEE123 Bnmit: Basic BJT ConstructionDocument21 pages22BEE123 Bnmit: Basic BJT ConstructionswathiNo ratings yet
- Shresthasingh Exp5Document11 pagesShresthasingh Exp5Shrestha Singh 21BRS1686No ratings yet
- Dissection of The Frog Grade RubricDocument1 pageDissection of The Frog Grade RubricrachellejulianoNo ratings yet
- Optimization Techniques: Case Study (Walsh'S Juice Company)Document19 pagesOptimization Techniques: Case Study (Walsh'S Juice Company)Muhammad Asim Muhammad ArshadNo ratings yet
- Research II: Quarter 3 - Module 2: Interpretation of DataDocument18 pagesResearch II: Quarter 3 - Module 2: Interpretation of DataTrexia Singson100% (1)
- API 5L Pipe SpecificationsDocument10 pagesAPI 5L Pipe SpecificationsFarid FaridNo ratings yet
- Alg 9.1 PacketDocument5 pagesAlg 9.1 PacketAN NGUYENNo ratings yet
- H 1390 ManualDocument12 pagesH 1390 ManualFELIPE IGNACIO C�RDOBA REBOLLEDONo ratings yet
- Botany (UG & PG)Document1 pageBotany (UG & PG)Harsha BabyNo ratings yet
- MSH 280 ProDocument18 pagesMSH 280 Proyusniar maulinaNo ratings yet
- Hazard Identification, Risk Assessment, and Determining Control (HIRADC) Method in A University Laboratory in Surabaya, IndonesiaDocument6 pagesHazard Identification, Risk Assessment, and Determining Control (HIRADC) Method in A University Laboratory in Surabaya, IndonesiaPasta GigiNo ratings yet
- METHODS and StrategiesDocument11 pagesMETHODS and StrategiesAlarde RolandoNo ratings yet
- SR5 TOOL Equipment, Communication & Deck Related, CompiledDocument5 pagesSR5 TOOL Equipment, Communication & Deck Related, CompiledBeki LokaNo ratings yet
- Session 10: Using Financial Results Controls in The Presence of Uncontrollable FactorsDocument16 pagesSession 10: Using Financial Results Controls in The Presence of Uncontrollable FactorsEka AdjieNo ratings yet
- CS490 Advanced Topics in Computing (Deep Learning)Document37 pagesCS490 Advanced Topics in Computing (Deep Learning)Afaq AhmedNo ratings yet
- Mathematics Grade 7 QuestionsDocument23 pagesMathematics Grade 7 QuestionsnurucareinternationalNo ratings yet
- Hellenistic Core Formed Glass From EpirusDocument11 pagesHellenistic Core Formed Glass From EpirusGeorgianna LaviniaNo ratings yet
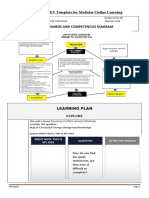
- 2021 JHS INSET Template For Modular/Online LearningDocument14 pages2021 JHS INSET Template For Modular/Online LearningMJ GuinacaranNo ratings yet
- GENERAL SURVEYING 1 Lab ManualDocument33 pagesGENERAL SURVEYING 1 Lab ManualAmber Jyl AlbuñanNo ratings yet
- FDN335NDocument5 pagesFDN335Njose aponteNo ratings yet
- Contoh Soal Beggs and BrillDocument8 pagesContoh Soal Beggs and BrillClaviano LeiwakabessyNo ratings yet
- Dental Radiography Principles and Techniques 4th Edition Iannucci Test BankDocument25 pagesDental Radiography Principles and Techniques 4th Edition Iannucci Test BankVanessaCurtisfcrxn100% (63)
- Hershey & Chase WorksheetDocument1 pageHershey & Chase WorksheetlpaetznickNo ratings yet