Download as pdf or txt
You might also like
- Mirror Me Software v7Document54 pagesMirror Me Software v7api-406104263No ratings yet
- 4 Digital Signal Processing in Simulink 2007 PDFDocument58 pages4 Digital Signal Processing in Simulink 2007 PDFhananel_forosNo ratings yet
- Lab 2 Manual - Student - 2223Document9 pagesLab 2 Manual - Student - 2223吳先生No ratings yet
- Synfig Studio 0.62.01 User ManualDocument36 pagesSynfig Studio 0.62.01 User Manualkrismega50% (2)
- Tutorial - Introduction To 3ds Max - 2122Document21 pagesTutorial - Introduction To 3ds Max - 2122吳先生No ratings yet
- Module 11 - Animations - BasicsDocument23 pagesModule 11 - Animations - BasicsMarious EesNo ratings yet
- RenderingDocument7 pagesRenderingcheesecheeeseNo ratings yet
- Unity 2D Game TutorialDocument23 pagesUnity 2D Game TutorialAlejandro GomezNo ratings yet
- Unit 62 BlogDocument38 pagesUnit 62 BlogssNo ratings yet
- Blender AnimationDocument2 pagesBlender AnimationArtagrace RagudoNo ratings yet
- CS248 Lecture 2: Introduction To UnityDocument47 pagesCS248 Lecture 2: Introduction To Unitychardchai korjittavanitNo ratings yet
- 1 Mimics IntroductionDocument12 pages1 Mimics IntroductionStan De SchepperNo ratings yet
- Job No: 14 Duration: 8H Job Title: Rendering Basics ObjectiveDocument7 pagesJob No: 14 Duration: 8H Job Title: Rendering Basics ObjectiveVinod MalikNo ratings yet
- Job No: 13 Duration: 16H Job Title: Create Basic Animation ObjectiveDocument15 pagesJob No: 13 Duration: 16H Job Title: Create Basic Animation ObjectiveCHERUYIOT IANNo ratings yet
- Unity Tutorials 2 - Unity Basics I - Starting A New ProjectDocument15 pagesUnity Tutorials 2 - Unity Basics I - Starting A New ProjectSteliosDoumasNo ratings yet
- Macquarie University Introductory Unity3D WorkshopDocument9 pagesMacquarie University Introductory Unity3D WorkshopZak ArisNo ratings yet
- Short NotesDocument7 pagesShort NotesSiddhant RajputNo ratings yet
- Path Animation PDFDocument11 pagesPath Animation PDFPERCYNo ratings yet
- Pro Builder DocumentationDocument20 pagesPro Builder DocumentationJunk KnightNo ratings yet
- Cópia de VRed and Interactive Virtual RealityDocument15 pagesCópia de VRed and Interactive Virtual RealitybrenimayaNo ratings yet
- 4.3 Workshop 01 B Post-ProcessingDocument27 pages4.3 Workshop 01 B Post-ProcessingHoussam BEN SALAHNo ratings yet
- Max Well Render 3dsmax Plugin ManualDocument60 pagesMax Well Render 3dsmax Plugin ManualSébastien FNo ratings yet
- Manual Mev PDFDocument31 pagesManual Mev PDFraulrosiqueNo ratings yet
- Name of The Lab (Multimedia Technologies)Document11 pagesName of The Lab (Multimedia Technologies)Guneet GargNo ratings yet
- BuildDocument32 pagesBuildapi-3857201No ratings yet
- Unity 2D Tutorial: Reid Perkins-Buzo! DIG 4905 VG&SDocument23 pagesUnity 2D Tutorial: Reid Perkins-Buzo! DIG 4905 VG&Slê hảoNo ratings yet
- Image Modeler Getting StartedDocument25 pagesImage Modeler Getting StartedPratik MistriNo ratings yet
- Revit Rendering Options PDFDocument29 pagesRevit Rendering Options PDFDeepnath MajumderNo ratings yet
- SpriteKit Simple GameDocument23 pagesSpriteKit Simple GameDaniel MarquezNo ratings yet
- Animator GuideDocument8 pagesAnimator GuideDavid QuirogaNo ratings yet
- SW Animator Guide PDFDocument8 pagesSW Animator Guide PDFSergio FernandesNo ratings yet
- MANUAL picoCADDocument14 pagesMANUAL picoCADJURAONNo ratings yet
- Solids Lesson 2Document26 pagesSolids Lesson 2camb2270No ratings yet
- An Introduction To 3D Animation Tutorial Four: Cameras and LightsDocument27 pagesAn Introduction To 3D Animation Tutorial Four: Cameras and LightsfurbyzNo ratings yet
- Synfig Manual 1Document26 pagesSynfig Manual 1bladimirNo ratings yet
- User GuideDocument30 pagesUser GuideLicinio SouzaNo ratings yet
- User Manual of KoPa Capture English - V8.5Document30 pagesUser Manual of KoPa Capture English - V8.5AwalJefriNo ratings yet
- Manual DSIDocument38 pagesManual DSINarcis MadernNo ratings yet
- UE4 Beginners Quick Start Guide V2-Part-2Document50 pagesUE4 Beginners Quick Start Guide V2-Part-2Güler VarolNo ratings yet
- Microcapture Microscope User GuideDocument67 pagesMicrocapture Microscope User GuideAlexis CorrochanoNo ratings yet
- Meade: Deep Sky Imager: The BasicsDocument38 pagesMeade: Deep Sky Imager: The BasicsdpinkleyNo ratings yet
- Imagemodeler Userguide 31-40Document10 pagesImagemodeler Userguide 31-40Jose L. B.S.No ratings yet
- How To Animate in BlenderDocument98 pagesHow To Animate in BlenderDhoy NavarroNo ratings yet
- Autodesk Inventor StudioDocument7 pagesAutodesk Inventor StudioGraham Moore100% (1)
- Duplicating AnimationsDocument2 pagesDuplicating Animationsdecaff_42No ratings yet
- Helpsetmaker Tutorials: Dirk Hillbrecht 17Th February 2004Document21 pagesHelpsetmaker Tutorials: Dirk Hillbrecht 17Th February 2004o_dimitrovNo ratings yet
- HW1 Blender BasicsDocument12 pagesHW1 Blender BasicsArsalan UddinNo ratings yet
- Custom ViewsDocument11 pagesCustom ViewsRaman GargNo ratings yet
- Quick Start: Reality Motion Systems GMBHDocument32 pagesQuick Start: Reality Motion Systems GMBHAbdo BedoNo ratings yet
- Automated Image MappingDocument8 pagesAutomated Image MappingJhoompieer VFNo ratings yet
- Sun Cast TutorialDocument20 pagesSun Cast TutorialFathina 'iin' NugrahantiNo ratings yet
- Autodesk Inventor - It's All in The PresentationDocument10 pagesAutodesk Inventor - It's All in The PresentationNdianabasi UdonkangNo ratings yet
- NIS Elements F User GuideDocument46 pagesNIS Elements F User GuideGeovanni Alejandro Balderrama AranibarNo ratings yet
- Lcmicro: User ManualDocument40 pagesLcmicro: User ManualAnthrayose ajith chackoNo ratings yet
- Caelinux and Finite Element Analysis. Tutorial 1, Perforated CubeDocument14 pagesCaelinux and Finite Element Analysis. Tutorial 1, Perforated Cubewindsurferke007No ratings yet
- Character RiggingDocument22 pagesCharacter RiggingMichael OgundipeNo ratings yet
- Virtual Boy Architecture: Architecture of Consoles: A Practical Analysis, #17From EverandVirtual Boy Architecture: Architecture of Consoles: A Practical Analysis, #17No ratings yet
- Simple DeformationsDocument4 pagesSimple Deformations吳先生No ratings yet
- Lec01 Introduction - Student - 2223Document44 pagesLec01 Introduction - Student - 2223吳先生No ratings yet
- Lec03 Advanced Modeling - 2122Document31 pagesLec03 Advanced Modeling - 2122吳先生No ratings yet
- Tutorial - Introduction To 3ds Max - 2122Document21 pagesTutorial - Introduction To 3ds Max - 2122吳先生No ratings yet
- Lec11 Advanced Computer Animation Techniques - 2122Document22 pagesLec11 Advanced Computer Animation Techniques - 2122吳先生No ratings yet
- Tutorial 2 Modeling 1 - 2122Document20 pagesTutorial 2 Modeling 1 - 2122吳先生No ratings yet
- Lec02 Modeling Concepts and Techniques - 2122Document34 pagesLec02 Modeling Concepts and Techniques - 2122吳先生No ratings yet
- Lab 2 Manual - Student - 2223Document9 pagesLab 2 Manual - Student - 2223吳先生No ratings yet
- HSC 11 Scalars and Vectors Ch2Document5 pagesHSC 11 Scalars and Vectors Ch2Snehal PanchalNo ratings yet
- Feasibility of Ethanol Production From Coffee Husks: Biotechnology Letters June 2009Document6 pagesFeasibility of Ethanol Production From Coffee Husks: Biotechnology Letters June 2009Jher OcretoNo ratings yet
- Mathematics Past Paper QuestionsDocument174 pagesMathematics Past Paper Questionsnodicoh572100% (2)
- ResearchDocument38 pagesResearchHelen McClintockNo ratings yet
- Applications Guide 2021 Covering LettersDocument8 pagesApplications Guide 2021 Covering LettersLALUKISNo ratings yet
- The Holy Spirit: A New LifeDocument2 pagesThe Holy Spirit: A New LifeKatu2010No ratings yet
- Synchronous Alternators: Three-Phase BrushlessDocument5 pagesSynchronous Alternators: Three-Phase BrushlessĐại DươngNo ratings yet
- September 23, Infer The Purpose of The Poem Listened ToDocument4 pagesSeptember 23, Infer The Purpose of The Poem Listened ToLouelle GonzalesNo ratings yet
- Final Simple Research (BS CRIM. 1-ALPHA)Document5 pagesFinal Simple Research (BS CRIM. 1-ALPHA)Julius VeluntaNo ratings yet
- Hell by D.L. MoodyDocument7 pagesHell by D.L. MoodyLisaNo ratings yet
- Rikki Tikki Tavi Story Lesson PlanDocument3 pagesRikki Tikki Tavi Story Lesson Planapi-248341220No ratings yet
- Cara Instal SeadasDocument7 pagesCara Instal SeadasIndah KurniawatiNo ratings yet
- Effects of Organic Manure On Okra (AbelmoschusDocument4 pagesEffects of Organic Manure On Okra (AbelmoschusShailendra RajanNo ratings yet
- Applications Training For Integrex-100 400MkIII Series Mazatrol FusionDocument122 pagesApplications Training For Integrex-100 400MkIII Series Mazatrol Fusiontsaladyga100% (6)
- Writing Home, Painting Home: 17th Century Dutch Genre Painting and The "Sailing Letters"Document17 pagesWriting Home, Painting Home: 17th Century Dutch Genre Painting and The "Sailing Letters"María MazzantiNo ratings yet
- L550 19MY MB XC-EN V1j DX PDFDocument88 pagesL550 19MY MB XC-EN V1j DX PDFAnonymous gMgeQl1SndNo ratings yet
- UntitledDocument2 pagesUntitledelleNo ratings yet
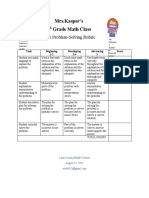
- Problemsolving RubricDocument1 pageProblemsolving Rubricapi-560491685No ratings yet
- ContinueDocument3 pagesContinueJúÑi ØrNo ratings yet
- 3M CorporationDocument3 pages3M CorporationIndoxfeeds GramNo ratings yet
- Research PaperDocument7 pagesResearch PaperHazirah AmniNo ratings yet
- Lesson Plan: I've Got Two SistersDocument5 pagesLesson Plan: I've Got Two SistersBianca BybyNo ratings yet
- Biogas ProductionDocument7 pagesBiogas ProductionFagbohungbe MichaelNo ratings yet
- Infosys-Broadcom E2E Continuous Testing Platform Business Process Automation SolutionDocument16 pagesInfosys-Broadcom E2E Continuous Testing Platform Business Process Automation Solutioncharu.hitechrobot2889No ratings yet
- In-Band Full-Duplex Interference For Underwater Acoustic Communication SystemsDocument6 pagesIn-Band Full-Duplex Interference For Underwater Acoustic Communication SystemsHarris TsimenidisNo ratings yet
- Dance As A CompetitionDocument3 pagesDance As A CompetitionJaymie NeriNo ratings yet
- Eng Pedagogy Class CTETDocument33 pagesEng Pedagogy Class CTETntajbun13No ratings yet
- Neuro TR Brochure - EN CompressedDocument8 pagesNeuro TR Brochure - EN CompressedJanam KuNo ratings yet
- Getting The Most From Lube Oil AnalysisDocument16 pagesGetting The Most From Lube Oil AnalysisGuru Raja Ragavendran Nagarajan100% (2)