
Hybrid Brain-Computer Interface (BCI) Based On The EEG and EOG Signals
Hybrid Brain-Computer Interface (BCI) Based On The EEG and EOG Signals
You might also like
- Manual of Abacre Points of Sale, POSDocument26 pagesManual of Abacre Points of Sale, POSdarwinism100% (1)
- Paper 28-EEG Mouse A Machine Learning-Based Brain Computer InterfaceDocument6 pagesPaper 28-EEG Mouse A Machine Learning-Based Brain Computer InterfaceSagar KarpeNo ratings yet
- Deep Learning Methods For EEG Signals Classification of Motor Imagery in BCIDocument5 pagesDeep Learning Methods For EEG Signals Classification of Motor Imagery in BCIDonni Cerpin PasaribuNo ratings yet
- Brain Computing Interface For Wheel Chair Control: Naveen.R.S, Anitha JulianDocument5 pagesBrain Computing Interface For Wheel Chair Control: Naveen.R.S, Anitha JulianShafayet UddinNo ratings yet
- Developing A Three - To Six-State EEG-Based Brain-Computer Interface For A Virtual Robotic Manipulator ControlDocument11 pagesDeveloping A Three - To Six-State EEG-Based Brain-Computer Interface For A Virtual Robotic Manipulator ControljoannaNo ratings yet
- A Spatio-Temporal Model For EEG-based PersonDocument21 pagesA Spatio-Temporal Model For EEG-based PersonChristian F. VegaNo ratings yet
- Ijsret v9 Issue3 241Document4 pagesIjsret v9 Issue3 241محمد عربNo ratings yet
- EEG BCI For Dual Task Driving DetectionDocument9 pagesEEG BCI For Dual Task Driving DetectionBudi SetyawanNo ratings yet
- Sulaiman Idris Sulaiman ProposalDocument36 pagesSulaiman Idris Sulaiman ProposalSulaimanNo ratings yet
- EEG Based Machine Control: Department of Electronics and Communication EngineeringDocument4 pagesEEG Based Machine Control: Department of Electronics and Communication EngineeringShoaib MughalNo ratings yet
- (P - N) Motor Imagery EEG Recognition Based On Conditional OptimizationDocument11 pages(P - N) Motor Imagery EEG Recognition Based On Conditional OptimizationChristian F. VegaNo ratings yet
- Chapter OneDocument5 pagesChapter Oneد. سعد قاسم الاجهزة الطبيةNo ratings yet
- 1 Phase Transition in Previous Motor Imagery Affects Efficiency of Motor Imagery Based Brain-Computer InterfaceDocument4 pages1 Phase Transition in Previous Motor Imagery Affects Efficiency of Motor Imagery Based Brain-Computer Interface정민경No ratings yet
- ELM2Document13 pagesELM2xtansion 2No ratings yet
- Wheelchair BCI IEEEDocument4 pagesWheelchair BCI IEEEElectrifying SaurabhNo ratings yet
- Control de Un Brazo Robótico Usando BCIDocument20 pagesControl de Un Brazo Robótico Usando BCIJorgeSlayerNo ratings yet
- Decoding Three-Dimensional Trajectory of Executed and Imagined Arm Movements From Electroencephalogram SignalsDocument10 pagesDecoding Three-Dimensional Trajectory of Executed and Imagined Arm Movements From Electroencephalogram SignalsjoannaNo ratings yet
- Identification Method of Human Movement Intention Based On The Fusion Feature of EEG and EMGDocument5 pagesIdentification Method of Human Movement Intention Based On The Fusion Feature of EEG and EMGjimmie_yagerNo ratings yet
- Applsci 10 01605 v2Document14 pagesApplsci 10 01605 v2Susan KunkleNo ratings yet
- An Upper-Limb Rehabilitation Exoskeleton System Controlled by MI Recognition Model With Deep Emphasized Informative FeaDocument12 pagesAn Upper-Limb Rehabilitation Exoskeleton System Controlled by MI Recognition Model With Deep Emphasized Informative Fea911205josephNo ratings yet
- Electronics 12 01186Document16 pagesElectronics 12 01186eljuplayergamesNo ratings yet
- Implementation of Robotic Arm Control Wi E4b9b3cb PDFDocument5 pagesImplementation of Robotic Arm Control Wi E4b9b3cb PDFCahya KamilaNo ratings yet
- 1d-Local Binary Pattern Based Feature Extraction For Classification of Epileptic EEG SignalsDocument11 pages1d-Local Binary Pattern Based Feature Extraction For Classification of Epileptic EEG Signalsforooz davoodzadehNo ratings yet
- BCIDocument24 pagesBCIramandeep kaurNo ratings yet
- A Neural Network-Based Time Series Prediction Approach For Feature Extraction in A Brain-Computer InterfaceDocument10 pagesA Neural Network-Based Time Series Prediction Approach For Feature Extraction in A Brain-Computer Interfacemartyf777No ratings yet
- Wireless and Wearable EEG System For Evaluating Driver VigilanceDocument13 pagesWireless and Wearable EEG System For Evaluating Driver VigilanceSarinaSubaNo ratings yet
- Brain GateDocument28 pagesBrain GateSana Kapoor0% (1)
- Impact of Adaptive Filtering-Based Component Analysis Method On Steady-State Visual Evoked Potential Based Brain Computer Interface SystemsDocument12 pagesImpact of Adaptive Filtering-Based Component Analysis Method On Steady-State Visual Evoked Potential Based Brain Computer Interface SystemsIAES IJAINo ratings yet
- Data Pre-Processing of ElectroencephalographyDocument11 pagesData Pre-Processing of ElectroencephalographysrirenganachiyarNo ratings yet
- Autonomuos Robot Control Based On EEG and Cross-Correlation First DraftDocument4 pagesAutonomuos Robot Control Based On EEG and Cross-Correlation First DraftjigardotcomNo ratings yet
- 2020 - Temporal-Spatial-Frequency Depth Extraction of Brain-ComputerDocument13 pages2020 - Temporal-Spatial-Frequency Depth Extraction of Brain-ComputernicoNo ratings yet
- An Integrated Fall Prevention System With Single-Channel EEG and EMG SensorDocument7 pagesAn Integrated Fall Prevention System With Single-Channel EEG and EMG SensorNG Jun HowNo ratings yet
- Evaluation of Consumer Grade EEG Headsets For BCI PDFDocument6 pagesEvaluation of Consumer Grade EEG Headsets For BCI PDFAvionicsNo ratings yet
- Labview Gui For Emotiv Epoc of Prosthetic Hand ControlDocument5 pagesLabview Gui For Emotiv Epoc of Prosthetic Hand ControlAbu Bakr M. SaeedNo ratings yet
- An EOG-Based HumanMachine Interface To Control A Smart Home Environment For Patients With Severe Spinal Cord InjuriesDocument12 pagesAn EOG-Based HumanMachine Interface To Control A Smart Home Environment For Patients With Severe Spinal Cord InjuriespavanNo ratings yet
- Abiri 2019 J. Neural Eng. 16 011001Document22 pagesAbiri 2019 J. Neural Eng. 16 011001xiansheng FNo ratings yet
- Sensors: A Brain-Machine Interface Based On ERD/ERS For An Upper-Limb Exoskeleton ControlDocument14 pagesSensors: A Brain-Machine Interface Based On ERD/ERS For An Upper-Limb Exoskeleton ControlLucas da SilvaNo ratings yet
- Motor Imagery Recognition of EEG Signal Using Cuckoo Search Masking Empirical Mode DecompositionDocument4 pagesMotor Imagery Recognition of EEG Signal Using Cuckoo Search Masking Empirical Mode DecompositionEditor IJTSRDNo ratings yet
- Forney 2011Document7 pagesForney 2011Carol JosephNo ratings yet
- Final Ieee My PaperDocument7 pagesFinal Ieee My PaperSarah HosniNo ratings yet
- Millan Clin-Neurophysiol08 PDFDocument11 pagesMillan Clin-Neurophysiol08 PDFShafayet UddinNo ratings yet
- tmp5FCC TMPDocument5 pagestmp5FCC TMPFrontiersNo ratings yet
- Electronics 11 02561 v2Document23 pagesElectronics 11 02561 v2MIKS DARKNo ratings yet
- Brain Computer InterfaceDocument19 pagesBrain Computer InterfaceSwathi BollineniNo ratings yet
- Journal Pre-Proof: Microprocessors and MicrosystemsDocument29 pagesJournal Pre-Proof: Microprocessors and MicrosystemsarjetaNo ratings yet
- Classification of Executed and Imagined Motor Movement EEG SignalsDocument10 pagesClassification of Executed and Imagined Motor Movement EEG SignalsBhuvaneswari VishwaNo ratings yet
- A Comparative Analysis On Feature Extraction and Classification of EEG Signal For Brain-Computer Interface ApplicationsDocument8 pagesA Comparative Analysis On Feature Extraction and Classification of EEG Signal For Brain-Computer Interface ApplicationsDaniel Garcia MurilloNo ratings yet
- Towards A Brain-Activated and Eye-Controlled WheelchairDocument2 pagesTowards A Brain-Activated and Eye-Controlled WheelchairAkshit SharmaNo ratings yet
- Research Proposal EnglishDocument9 pagesResearch Proposal Englishkarem aymanNo ratings yet
- Feature Extraction Techniques For Cognitive Stimuli-Based Electroencephalogram Signals: An Experimental AnalysisDocument13 pagesFeature Extraction Techniques For Cognitive Stimuli-Based Electroencephalogram Signals: An Experimental AnalysisIAES International Journal of Robotics and AutomationNo ratings yet
- NeurIPS 2022 JorgeAndresSanchezBautistaDocument10 pagesNeurIPS 2022 JorgeAndresSanchezBautistaJorge SánchezNo ratings yet
- Quadcopter Control in Three-Dimensional Space Using A Noninvasive Motor Imagery-Based Brain-Computer InterfaceDocument16 pagesQuadcopter Control in Three-Dimensional Space Using A Noninvasive Motor Imagery-Based Brain-Computer InterfaceReza Ardiansyah MahedaNo ratings yet
- Sensors: Identification of Lower-Limb Motor Tasks Via Brain-Computer Interfaces: A Topical OverviewDocument24 pagesSensors: Identification of Lower-Limb Motor Tasks Via Brain-Computer Interfaces: A Topical OverviewCarolina CarrereNo ratings yet
- M C R U S - C EEG: Ethods of Ommand Ecognition Sing Ingle Hannel SDocument11 pagesM C R U S - C EEG: Ethods of Ommand Ecognition Sing Ingle Hannel SMandy DiazNo ratings yet
- Traitement Du Signal: Received: 7 June 2020 Accepted: 13 October 2020Document7 pagesTraitement Du Signal: Received: 7 June 2020 Accepted: 13 October 2020strummaticjonazNo ratings yet
- EEG Signal Analysis and Characterization For The Aid of Disabled PeopleDocument8 pagesEEG Signal Analysis and Characterization For The Aid of Disabled PeopleShafayet UddinNo ratings yet
- The Classification of EEG-based Winking Signals: A Transfer Learning and Random Forest ApproachDocument7 pagesThe Classification of EEG-based Winking Signals: A Transfer Learning and Random Forest ApproachDhruv TNo ratings yet
- Research Article: EOG-sEMG Human Interface For CommunicationDocument11 pagesResearch Article: EOG-sEMG Human Interface For Communicationgustavo da silvaNo ratings yet
- Classification of EEG Signal Using EACA Based Approach at SSVEP-BCIDocument10 pagesClassification of EEG Signal Using EACA Based Approach at SSVEP-BCIIAES IJAINo ratings yet
- Brain-Computer Interfaces 1: Methods and PerspectivesFrom EverandBrain-Computer Interfaces 1: Methods and PerspectivesMaureen ClercNo ratings yet
- Brain-Computer Interfaces 2: Technology and ApplicationsFrom EverandBrain-Computer Interfaces 2: Technology and ApplicationsMaureen ClercNo ratings yet
- 宋永君Document152 pages宋永君Bukong LiNo ratings yet
- Towards Error Categorisation in BCI Single-TrialDocument17 pagesTowards Error Categorisation in BCI Single-TrialBukong LiNo ratings yet
- Prototype Design and Implementation of An Automatic Control System Based On A BCIDocument13 pagesPrototype Design and Implementation of An Automatic Control System Based On A BCIBukong LiNo ratings yet
- BCI-Based Control of Electric Wheelchair Using Fractal Characteristics ofDocument9 pagesBCI-Based Control of Electric Wheelchair Using Fractal Characteristics ofBukong LiNo ratings yet
- A Useful Communication in Brain-Computer InterfacesDocument3 pagesA Useful Communication in Brain-Computer InterfacesBukong LiNo ratings yet
- Decon (Radial Thru-Hole) SH SeriesDocument2 pagesDecon (Radial Thru-Hole) SH Serieszuigh899gNo ratings yet
- A541-Ccag Aoc Eco TekDocument2 pagesA541-Ccag Aoc Eco TekHemmingsNo ratings yet
- Manual MetarouterDocument9 pagesManual MetarouterRobertito MenesesNo ratings yet
- Daikin J-RP Manual enDocument20 pagesDaikin J-RP Manual enmoiNo ratings yet
- Oracle9i Jdeveloper User's GuideDocument4,683 pagesOracle9i Jdeveloper User's Guidealvati85No ratings yet
- Skoda AutoDocument20 pagesSkoda AutoChintu KumarNo ratings yet
- XXDocument102 pagesXXy_596688032No ratings yet
- 10.2.4.4 Lab - Troubleshooting DHCPv6Document6 pages10.2.4.4 Lab - Troubleshooting DHCPv6Karla ArroyoNo ratings yet
- ORDocument102 pagesORYehualashet FelekeNo ratings yet
- PCN V19-001-484754120aDocument6 pagesPCN V19-001-484754120ajonatas Cassiano da silvaNo ratings yet
- Fire Piping Installation and FlushingDocument7 pagesFire Piping Installation and Flushingsunny_84tNo ratings yet
- Oracle Financials RXi Reports Administration ToolDocument52 pagesOracle Financials RXi Reports Administration TooljustanigameNo ratings yet
- Maintenance Procedures: Mfr. Description Date Issued: Revision DateDocument8 pagesMaintenance Procedures: Mfr. Description Date Issued: Revision DateCarolina Diaz MurillasNo ratings yet
- Piping Design CriteriaDocument15 pagesPiping Design CriteriaSubash Chandrabose50% (2)
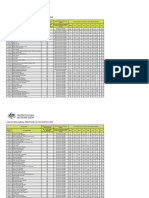
- Skills Priority List - September 2023Document39 pagesSkills Priority List - September 202311A8.01. Hoàng Phú AnNo ratings yet
- Sartorius Balance Cable Pinouts - TALtechDocument2 pagesSartorius Balance Cable Pinouts - TALtechWill CariasNo ratings yet
- EM2000 Messages 20090211 by Code PDFDocument169 pagesEM2000 Messages 20090211 by Code PDFSudarshan DhumalNo ratings yet
- En 13852 ErrataDocument6 pagesEn 13852 Erratamihai90No ratings yet
- Accedian TE DatasheetDocument2 pagesAccedian TE Datasheetgates2010No ratings yet
- Supercritical Fluid Extraction 1Document18 pagesSupercritical Fluid Extraction 1ÔnKhốiANo ratings yet
- Me6604 Gas Dynamics and Jet PropulsionDocument8 pagesMe6604 Gas Dynamics and Jet PropulsionMohanraj SubramaniNo ratings yet
- Chemical Reaction and EquationsDocument2 pagesChemical Reaction and EquationsAmanda LopesNo ratings yet
- 3G TOPS FormulaDocument29 pages3G TOPS FormulaRao DheeruNo ratings yet
- The Doppler Effect (Or The Doppler Shift) Is The: Page 1 of 27Document27 pagesThe Doppler Effect (Or The Doppler Shift) Is The: Page 1 of 27Mohamed Aswir AswirNo ratings yet
- Rule: Federal Implementation Plan For The Billings/Laurel, MT, Sulfur Dioxide AreaDocument49 pagesRule: Federal Implementation Plan For The Billings/Laurel, MT, Sulfur Dioxide AreaJustia.comNo ratings yet
- Saes Q 004Document24 pagesSaes Q 004AasimNo ratings yet
- FieldMove Clino Help PDFDocument39 pagesFieldMove Clino Help PDFAndy peñafiel laraNo ratings yet
- Automated Wall Production LineDocument4 pagesAutomated Wall Production LineCici GonzalesNo ratings yet





























































































Download as pdf or txt
You might also like
- Manual of Abacre Points of Sale, POSDocument26 pagesManual of Abacre Points of Sale, POSdarwinism100% (1)
- Paper 28-EEG Mouse A Machine Learning-Based Brain Computer InterfaceDocument6 pagesPaper 28-EEG Mouse A Machine Learning-Based Brain Computer InterfaceSagar KarpeNo ratings yet
- Deep Learning Methods For EEG Signals Classification of Motor Imagery in BCIDocument5 pagesDeep Learning Methods For EEG Signals Classification of Motor Imagery in BCIDonni Cerpin PasaribuNo ratings yet
- Brain Computing Interface For Wheel Chair Control: Naveen.R.S, Anitha JulianDocument5 pagesBrain Computing Interface For Wheel Chair Control: Naveen.R.S, Anitha JulianShafayet UddinNo ratings yet
- Developing A Three - To Six-State EEG-Based Brain-Computer Interface For A Virtual Robotic Manipulator ControlDocument11 pagesDeveloping A Three - To Six-State EEG-Based Brain-Computer Interface For A Virtual Robotic Manipulator ControljoannaNo ratings yet
- A Spatio-Temporal Model For EEG-based PersonDocument21 pagesA Spatio-Temporal Model For EEG-based PersonChristian F. VegaNo ratings yet
- Ijsret v9 Issue3 241Document4 pagesIjsret v9 Issue3 241محمد عربNo ratings yet
- EEG BCI For Dual Task Driving DetectionDocument9 pagesEEG BCI For Dual Task Driving DetectionBudi SetyawanNo ratings yet
- Sulaiman Idris Sulaiman ProposalDocument36 pagesSulaiman Idris Sulaiman ProposalSulaimanNo ratings yet
- EEG Based Machine Control: Department of Electronics and Communication EngineeringDocument4 pagesEEG Based Machine Control: Department of Electronics and Communication EngineeringShoaib MughalNo ratings yet
- (P - N) Motor Imagery EEG Recognition Based On Conditional OptimizationDocument11 pages(P - N) Motor Imagery EEG Recognition Based On Conditional OptimizationChristian F. VegaNo ratings yet
- Chapter OneDocument5 pagesChapter Oneد. سعد قاسم الاجهزة الطبيةNo ratings yet
- 1 Phase Transition in Previous Motor Imagery Affects Efficiency of Motor Imagery Based Brain-Computer InterfaceDocument4 pages1 Phase Transition in Previous Motor Imagery Affects Efficiency of Motor Imagery Based Brain-Computer Interface정민경No ratings yet
- ELM2Document13 pagesELM2xtansion 2No ratings yet
- Wheelchair BCI IEEEDocument4 pagesWheelchair BCI IEEEElectrifying SaurabhNo ratings yet
- Control de Un Brazo Robótico Usando BCIDocument20 pagesControl de Un Brazo Robótico Usando BCIJorgeSlayerNo ratings yet
- Decoding Three-Dimensional Trajectory of Executed and Imagined Arm Movements From Electroencephalogram SignalsDocument10 pagesDecoding Three-Dimensional Trajectory of Executed and Imagined Arm Movements From Electroencephalogram SignalsjoannaNo ratings yet
- Identification Method of Human Movement Intention Based On The Fusion Feature of EEG and EMGDocument5 pagesIdentification Method of Human Movement Intention Based On The Fusion Feature of EEG and EMGjimmie_yagerNo ratings yet
- Applsci 10 01605 v2Document14 pagesApplsci 10 01605 v2Susan KunkleNo ratings yet
- An Upper-Limb Rehabilitation Exoskeleton System Controlled by MI Recognition Model With Deep Emphasized Informative FeaDocument12 pagesAn Upper-Limb Rehabilitation Exoskeleton System Controlled by MI Recognition Model With Deep Emphasized Informative Fea911205josephNo ratings yet
- Electronics 12 01186Document16 pagesElectronics 12 01186eljuplayergamesNo ratings yet
- Implementation of Robotic Arm Control Wi E4b9b3cb PDFDocument5 pagesImplementation of Robotic Arm Control Wi E4b9b3cb PDFCahya KamilaNo ratings yet
- 1d-Local Binary Pattern Based Feature Extraction For Classification of Epileptic EEG SignalsDocument11 pages1d-Local Binary Pattern Based Feature Extraction For Classification of Epileptic EEG Signalsforooz davoodzadehNo ratings yet
- BCIDocument24 pagesBCIramandeep kaurNo ratings yet
- A Neural Network-Based Time Series Prediction Approach For Feature Extraction in A Brain-Computer InterfaceDocument10 pagesA Neural Network-Based Time Series Prediction Approach For Feature Extraction in A Brain-Computer Interfacemartyf777No ratings yet
- Wireless and Wearable EEG System For Evaluating Driver VigilanceDocument13 pagesWireless and Wearable EEG System For Evaluating Driver VigilanceSarinaSubaNo ratings yet
- Brain GateDocument28 pagesBrain GateSana Kapoor0% (1)
- Impact of Adaptive Filtering-Based Component Analysis Method On Steady-State Visual Evoked Potential Based Brain Computer Interface SystemsDocument12 pagesImpact of Adaptive Filtering-Based Component Analysis Method On Steady-State Visual Evoked Potential Based Brain Computer Interface SystemsIAES IJAINo ratings yet
- Data Pre-Processing of ElectroencephalographyDocument11 pagesData Pre-Processing of ElectroencephalographysrirenganachiyarNo ratings yet
- Autonomuos Robot Control Based On EEG and Cross-Correlation First DraftDocument4 pagesAutonomuos Robot Control Based On EEG and Cross-Correlation First DraftjigardotcomNo ratings yet
- 2020 - Temporal-Spatial-Frequency Depth Extraction of Brain-ComputerDocument13 pages2020 - Temporal-Spatial-Frequency Depth Extraction of Brain-ComputernicoNo ratings yet
- An Integrated Fall Prevention System With Single-Channel EEG and EMG SensorDocument7 pagesAn Integrated Fall Prevention System With Single-Channel EEG and EMG SensorNG Jun HowNo ratings yet
- Evaluation of Consumer Grade EEG Headsets For BCI PDFDocument6 pagesEvaluation of Consumer Grade EEG Headsets For BCI PDFAvionicsNo ratings yet
- Labview Gui For Emotiv Epoc of Prosthetic Hand ControlDocument5 pagesLabview Gui For Emotiv Epoc of Prosthetic Hand ControlAbu Bakr M. SaeedNo ratings yet
- An EOG-Based HumanMachine Interface To Control A Smart Home Environment For Patients With Severe Spinal Cord InjuriesDocument12 pagesAn EOG-Based HumanMachine Interface To Control A Smart Home Environment For Patients With Severe Spinal Cord InjuriespavanNo ratings yet
- Abiri 2019 J. Neural Eng. 16 011001Document22 pagesAbiri 2019 J. Neural Eng. 16 011001xiansheng FNo ratings yet
- Sensors: A Brain-Machine Interface Based On ERD/ERS For An Upper-Limb Exoskeleton ControlDocument14 pagesSensors: A Brain-Machine Interface Based On ERD/ERS For An Upper-Limb Exoskeleton ControlLucas da SilvaNo ratings yet
- Motor Imagery Recognition of EEG Signal Using Cuckoo Search Masking Empirical Mode DecompositionDocument4 pagesMotor Imagery Recognition of EEG Signal Using Cuckoo Search Masking Empirical Mode DecompositionEditor IJTSRDNo ratings yet
- Forney 2011Document7 pagesForney 2011Carol JosephNo ratings yet
- Final Ieee My PaperDocument7 pagesFinal Ieee My PaperSarah HosniNo ratings yet
- Millan Clin-Neurophysiol08 PDFDocument11 pagesMillan Clin-Neurophysiol08 PDFShafayet UddinNo ratings yet
- tmp5FCC TMPDocument5 pagestmp5FCC TMPFrontiersNo ratings yet
- Electronics 11 02561 v2Document23 pagesElectronics 11 02561 v2MIKS DARKNo ratings yet
- Brain Computer InterfaceDocument19 pagesBrain Computer InterfaceSwathi BollineniNo ratings yet
- Journal Pre-Proof: Microprocessors and MicrosystemsDocument29 pagesJournal Pre-Proof: Microprocessors and MicrosystemsarjetaNo ratings yet
- Classification of Executed and Imagined Motor Movement EEG SignalsDocument10 pagesClassification of Executed and Imagined Motor Movement EEG SignalsBhuvaneswari VishwaNo ratings yet
- A Comparative Analysis On Feature Extraction and Classification of EEG Signal For Brain-Computer Interface ApplicationsDocument8 pagesA Comparative Analysis On Feature Extraction and Classification of EEG Signal For Brain-Computer Interface ApplicationsDaniel Garcia MurilloNo ratings yet
- Towards A Brain-Activated and Eye-Controlled WheelchairDocument2 pagesTowards A Brain-Activated and Eye-Controlled WheelchairAkshit SharmaNo ratings yet
- Research Proposal EnglishDocument9 pagesResearch Proposal Englishkarem aymanNo ratings yet
- Feature Extraction Techniques For Cognitive Stimuli-Based Electroencephalogram Signals: An Experimental AnalysisDocument13 pagesFeature Extraction Techniques For Cognitive Stimuli-Based Electroencephalogram Signals: An Experimental AnalysisIAES International Journal of Robotics and AutomationNo ratings yet
- NeurIPS 2022 JorgeAndresSanchezBautistaDocument10 pagesNeurIPS 2022 JorgeAndresSanchezBautistaJorge SánchezNo ratings yet
- Quadcopter Control in Three-Dimensional Space Using A Noninvasive Motor Imagery-Based Brain-Computer InterfaceDocument16 pagesQuadcopter Control in Three-Dimensional Space Using A Noninvasive Motor Imagery-Based Brain-Computer InterfaceReza Ardiansyah MahedaNo ratings yet
- Sensors: Identification of Lower-Limb Motor Tasks Via Brain-Computer Interfaces: A Topical OverviewDocument24 pagesSensors: Identification of Lower-Limb Motor Tasks Via Brain-Computer Interfaces: A Topical OverviewCarolina CarrereNo ratings yet
- M C R U S - C EEG: Ethods of Ommand Ecognition Sing Ingle Hannel SDocument11 pagesM C R U S - C EEG: Ethods of Ommand Ecognition Sing Ingle Hannel SMandy DiazNo ratings yet
- Traitement Du Signal: Received: 7 June 2020 Accepted: 13 October 2020Document7 pagesTraitement Du Signal: Received: 7 June 2020 Accepted: 13 October 2020strummaticjonazNo ratings yet
- EEG Signal Analysis and Characterization For The Aid of Disabled PeopleDocument8 pagesEEG Signal Analysis and Characterization For The Aid of Disabled PeopleShafayet UddinNo ratings yet
- The Classification of EEG-based Winking Signals: A Transfer Learning and Random Forest ApproachDocument7 pagesThe Classification of EEG-based Winking Signals: A Transfer Learning and Random Forest ApproachDhruv TNo ratings yet
- Research Article: EOG-sEMG Human Interface For CommunicationDocument11 pagesResearch Article: EOG-sEMG Human Interface For Communicationgustavo da silvaNo ratings yet
- Classification of EEG Signal Using EACA Based Approach at SSVEP-BCIDocument10 pagesClassification of EEG Signal Using EACA Based Approach at SSVEP-BCIIAES IJAINo ratings yet
- Brain-Computer Interfaces 1: Methods and PerspectivesFrom EverandBrain-Computer Interfaces 1: Methods and PerspectivesMaureen ClercNo ratings yet
- Brain-Computer Interfaces 2: Technology and ApplicationsFrom EverandBrain-Computer Interfaces 2: Technology and ApplicationsMaureen ClercNo ratings yet
- 宋永君Document152 pages宋永君Bukong LiNo ratings yet
- Towards Error Categorisation in BCI Single-TrialDocument17 pagesTowards Error Categorisation in BCI Single-TrialBukong LiNo ratings yet
- Prototype Design and Implementation of An Automatic Control System Based On A BCIDocument13 pagesPrototype Design and Implementation of An Automatic Control System Based On A BCIBukong LiNo ratings yet
- BCI-Based Control of Electric Wheelchair Using Fractal Characteristics ofDocument9 pagesBCI-Based Control of Electric Wheelchair Using Fractal Characteristics ofBukong LiNo ratings yet
- A Useful Communication in Brain-Computer InterfacesDocument3 pagesA Useful Communication in Brain-Computer InterfacesBukong LiNo ratings yet
- Decon (Radial Thru-Hole) SH SeriesDocument2 pagesDecon (Radial Thru-Hole) SH Serieszuigh899gNo ratings yet
- A541-Ccag Aoc Eco TekDocument2 pagesA541-Ccag Aoc Eco TekHemmingsNo ratings yet
- Manual MetarouterDocument9 pagesManual MetarouterRobertito MenesesNo ratings yet
- Daikin J-RP Manual enDocument20 pagesDaikin J-RP Manual enmoiNo ratings yet
- Oracle9i Jdeveloper User's GuideDocument4,683 pagesOracle9i Jdeveloper User's Guidealvati85No ratings yet
- Skoda AutoDocument20 pagesSkoda AutoChintu KumarNo ratings yet
- XXDocument102 pagesXXy_596688032No ratings yet
- 10.2.4.4 Lab - Troubleshooting DHCPv6Document6 pages10.2.4.4 Lab - Troubleshooting DHCPv6Karla ArroyoNo ratings yet
- ORDocument102 pagesORYehualashet FelekeNo ratings yet
- PCN V19-001-484754120aDocument6 pagesPCN V19-001-484754120ajonatas Cassiano da silvaNo ratings yet
- Fire Piping Installation and FlushingDocument7 pagesFire Piping Installation and Flushingsunny_84tNo ratings yet
- Oracle Financials RXi Reports Administration ToolDocument52 pagesOracle Financials RXi Reports Administration TooljustanigameNo ratings yet
- Maintenance Procedures: Mfr. Description Date Issued: Revision DateDocument8 pagesMaintenance Procedures: Mfr. Description Date Issued: Revision DateCarolina Diaz MurillasNo ratings yet
- Piping Design CriteriaDocument15 pagesPiping Design CriteriaSubash Chandrabose50% (2)
- Skills Priority List - September 2023Document39 pagesSkills Priority List - September 202311A8.01. Hoàng Phú AnNo ratings yet
- Sartorius Balance Cable Pinouts - TALtechDocument2 pagesSartorius Balance Cable Pinouts - TALtechWill CariasNo ratings yet
- EM2000 Messages 20090211 by Code PDFDocument169 pagesEM2000 Messages 20090211 by Code PDFSudarshan DhumalNo ratings yet
- En 13852 ErrataDocument6 pagesEn 13852 Erratamihai90No ratings yet
- Accedian TE DatasheetDocument2 pagesAccedian TE Datasheetgates2010No ratings yet
- Supercritical Fluid Extraction 1Document18 pagesSupercritical Fluid Extraction 1ÔnKhốiANo ratings yet
- Me6604 Gas Dynamics and Jet PropulsionDocument8 pagesMe6604 Gas Dynamics and Jet PropulsionMohanraj SubramaniNo ratings yet
- Chemical Reaction and EquationsDocument2 pagesChemical Reaction and EquationsAmanda LopesNo ratings yet
- 3G TOPS FormulaDocument29 pages3G TOPS FormulaRao DheeruNo ratings yet
- The Doppler Effect (Or The Doppler Shift) Is The: Page 1 of 27Document27 pagesThe Doppler Effect (Or The Doppler Shift) Is The: Page 1 of 27Mohamed Aswir AswirNo ratings yet
- Rule: Federal Implementation Plan For The Billings/Laurel, MT, Sulfur Dioxide AreaDocument49 pagesRule: Federal Implementation Plan For The Billings/Laurel, MT, Sulfur Dioxide AreaJustia.comNo ratings yet
- Saes Q 004Document24 pagesSaes Q 004AasimNo ratings yet
- FieldMove Clino Help PDFDocument39 pagesFieldMove Clino Help PDFAndy peñafiel laraNo ratings yet
- Automated Wall Production LineDocument4 pagesAutomated Wall Production LineCici GonzalesNo ratings yet