Download as pdf or txt
You might also like
- Mikrotik SSTPDocument16 pagesMikrotik SSTPmiraNo ratings yet
- Lab Workbook With Solutions-Final PDFDocument109 pagesLab Workbook With Solutions-Final PDFAbhinash Alla100% (5)
- Machine Learning with Clustering: A Visual Guide for Beginners with Examples in PythonFrom EverandMachine Learning with Clustering: A Visual Guide for Beginners with Examples in PythonNo ratings yet
- Fruit Recognition From Images Using Deep Learning: Horea Mures AnDocument54 pagesFruit Recognition From Images Using Deep Learning: Horea Mures AnIceNFirE GamingNo ratings yet
- Fruit Recognition Deep LearningDocument53 pagesFruit Recognition Deep Learningsaran20099No ratings yet
- A Review On Basic Deep LearningDocument9 pagesA Review On Basic Deep Learningyanbiao liNo ratings yet
- Matecconf Icpcm2022 03027Document6 pagesMatecconf Icpcm2022 03027rezaNo ratings yet
- DSIE BICkM JnunesDocument13 pagesDSIE BICkM JnunesMR. ADARSH KUMAR NAYAKNo ratings yet
- 15 Chapter6 PDFDocument12 pages15 Chapter6 PDFdivaNo ratings yet
- User Manual (Mental Health Issue Among University StudentDocument19 pagesUser Manual (Mental Health Issue Among University StudentANIS NABIHAH BINTI MOHD JAISNo ratings yet
- Recognizing Groceries in Situ Using in Vitro Training Data: Michele Merler Carolina Galleguillos Serge BelongieDocument8 pagesRecognizing Groceries in Situ Using in Vitro Training Data: Michele Merler Carolina Galleguillos Serge Belongieakash agarwalNo ratings yet
- Classification of Multiclass Imbalanced Data Using Cost-Sensitive Decision Tree C5.0Document8 pagesClassification of Multiclass Imbalanced Data Using Cost-Sensitive Decision Tree C5.0IAES IJAINo ratings yet
- Tri-Net For Semi-Supervised Deep LearningDocument7 pagesTri-Net For Semi-Supervised Deep LearningbusuulwaerickNo ratings yet
- Genetic Algorithms For Object Recognition IN A: Complex SceneDocument4 pagesGenetic Algorithms For Object Recognition IN A: Complex Scenehvactrg1No ratings yet
- Hillol Kargupta, Byung-Hoon Park, Daryl Hershberger, and Erik JohnsonDocument36 pagesHillol Kargupta, Byung-Hoon Park, Daryl Hershberger, and Erik JohnsonaNo ratings yet
- Income PredictionDocument19 pagesIncome PredictionCh Bilal MakenNo ratings yet
- Research Paper On Counting SortDocument5 pagesResearch Paper On Counting Sortefdkhd4e100% (1)
- Reinforced Active LearningDocument17 pagesReinforced Active LearningalturnerianNo ratings yet
- RM - Data Exploration and Pre-Processing Using OrangeDocument28 pagesRM - Data Exploration and Pre-Processing Using OrangeLoganathaan SrimathiNo ratings yet
- VideDocument80 pagesVideRajnishKumarNo ratings yet
- Wps Stack Implementation Group 2 AssignmentDocument18 pagesWps Stack Implementation Group 2 AssignmentBedaso EndaleNo ratings yet
- (IJCST-V5I6P21) :babasaheb .S. Satpute, Dr. Raghav YadavDocument4 pages(IJCST-V5I6P21) :babasaheb .S. Satpute, Dr. Raghav YadavEighthSenseGroupNo ratings yet
- A Salient Information Processing System For Bionic Eye With Application To Obstacle AvoidanceDocument4 pagesA Salient Information Processing System For Bionic Eye With Application To Obstacle AvoidanceSnigdhangshu BanerjeeNo ratings yet
- Machine Learning and Big DataDocument17 pagesMachine Learning and Big DataArkabho BiswasNo ratings yet
- Toward Retail Product Recognition On Grocery ShelvesDocument7 pagesToward Retail Product Recognition On Grocery Shelvesshyam SaravananNo ratings yet
- Soft Set Based Techniques - FullDocument8 pagesSoft Set Based Techniques - FullTJPRC PublicationsNo ratings yet
- Iccia2022 1 6Document6 pagesIccia2022 1 6turmi britoNo ratings yet
- Smart Garbage Classification SystemDocument13 pagesSmart Garbage Classification SystemSheethal K. SNo ratings yet
- Yolo Fruit RipenessDocument18 pagesYolo Fruit RipenessAyush MishraNo ratings yet
- Compusoft, 3 (6), 831-835 PDFDocument5 pagesCompusoft, 3 (6), 831-835 PDFIjact EditorNo ratings yet
- Assignment 2Document5 pagesAssignment 2Dipankar GogoiNo ratings yet
- Scikit-Learn Cookbook Sample ChapterDocument52 pagesScikit-Learn Cookbook Sample ChapterPackt PublishingNo ratings yet
- 5886363766769259-Artificial Intelligence-3 - Sustainable Farming - EDU GuideDocument8 pages5886363766769259-Artificial Intelligence-3 - Sustainable Farming - EDU GuideyuuvykhereNo ratings yet
- A Comparative Study of Classification Methods in Data Mining Using RapidMiner StudioDocument6 pagesA Comparative Study of Classification Methods in Data Mining Using RapidMiner Studiomishranamit2211100% (1)
- Final ReportDocument38 pagesFinal ReportPranav ViswanathanNo ratings yet
- Report Data LoggerDocument13 pagesReport Data LoggerNur FasihahNo ratings yet
- Design of Intelligent Classroom Facial RecognitionDocument9 pagesDesign of Intelligent Classroom Facial RecognitionFiras AlsamaraaiNo ratings yet
- Exploratory Analysis and Geolocation of Data To Help Student Find Housing FacilitiesDocument5 pagesExploratory Analysis and Geolocation of Data To Help Student Find Housing FacilitiesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Paper For Ripening Detection Using Ai and DLDocument13 pagesPaper For Ripening Detection Using Ai and DLWeb ResearchNo ratings yet
- Artificial Vision For The Visually Impaired: Siddhi Potdar Sakshi Gupta Siddharth Kulkarni Aditya Kawale Pallavi DhadeDocument10 pagesArtificial Vision For The Visually Impaired: Siddhi Potdar Sakshi Gupta Siddharth Kulkarni Aditya Kawale Pallavi Dhadesonali kambleNo ratings yet
- Develop A Program To Implement Data Preprocessing UsingDocument19 pagesDevelop A Program To Implement Data Preprocessing UsingFucker JamunNo ratings yet
- Rainfall PredictionDocument33 pagesRainfall PredictionNaasif M100% (1)
- Machine Learnin-WPS Office PDFDocument11 pagesMachine Learnin-WPS Office PDFSoham ChatterjeeNo ratings yet
- Institute Vision and Mission Vision: PEO1: PEO2: PEO3Document35 pagesInstitute Vision and Mission Vision: PEO1: PEO2: PEO3Faisal AhmadNo ratings yet
- Image Segmentation and Recognition Using MATLABDocument14 pagesImage Segmentation and Recognition Using MATLABPrafful SomaniNo ratings yet
- Genetic Algorithm Based Semi-Feature Selection Method: Hualong Bu Shangzhi Zheng, Jing XiaDocument4 pagesGenetic Algorithm Based Semi-Feature Selection Method: Hualong Bu Shangzhi Zheng, Jing XiaAyman MadboulyNo ratings yet
- Fruit Quality Classifier - Group 1Document12 pagesFruit Quality Classifier - Group 1Bruno TelesNo ratings yet
- Referensi TLDocument10 pagesReferensi TLDwi Ajeng Risqy HasanahSyamNo ratings yet
- Mini AI NewDocument17 pagesMini AI NewNightdive StudiosNo ratings yet
- An Efficient Classification Algorithm For Real Estate DomainDocument7 pagesAn Efficient Classification Algorithm For Real Estate DomainIJMERNo ratings yet
- Data Mining AssignmentDocument8 pagesData Mining AssignmentAmanat ConstructionNo ratings yet
- Data Mining University AnswerDocument10 pagesData Mining University Answeroozed12No ratings yet
- "Detection and Classification of Consumed Food Items" Using Deep Learning AlgorithmDocument19 pages"Detection and Classification of Consumed Food Items" Using Deep Learning Algorithmjeffery lawrenceNo ratings yet
- Machine Learning 22618 ETIDocument14 pagesMachine Learning 22618 ETISandip kotkarNo ratings yet
- Data Augmentation Strategies For Eeg Based Motor Imagery DecodingDocument14 pagesData Augmentation Strategies For Eeg Based Motor Imagery Decodinggunda manasaNo ratings yet
- Report - Nutrition Analysis Using Image ClassificationDocument10 pagesReport - Nutrition Analysis Using Image Classificationpoi poiNo ratings yet
- Applied Deep Learning - Part 2 - Real World Case Studies - by Arden Dertat - Towards Data ScienceDocument39 pagesApplied Deep Learning - Part 2 - Real World Case Studies - by Arden Dertat - Towards Data Sciencemayank.tiwariNo ratings yet
- Rmit at Imageclef 2011 Plant IdentificationDocument5 pagesRmit at Imageclef 2011 Plant IdentificationDalcimar CasanovaNo ratings yet
- Handling Missing DataDocument21 pagesHandling Missing DataJenny CastilloNo ratings yet
- Analysis of Effectiveness Particle Swarm Optimization in Improving The Performance of Naïve Bayes AlgorithmDocument5 pagesAnalysis of Effectiveness Particle Swarm Optimization in Improving The Performance of Naïve Bayes Algorithmikhsan romliNo ratings yet
- One Moment Can Change The GameDocument14 pagesOne Moment Can Change The GameFenny ShahNo ratings yet
- Lecture 5, 6, 7 & 8 Database Systems: Comsats University Islamabad, Wah CampusDocument59 pagesLecture 5, 6, 7 & 8 Database Systems: Comsats University Islamabad, Wah CampusSyed IrtazaNo ratings yet
- Visit Braindump2go and Download Full Version JN0-103 Exam DumpsDocument3 pagesVisit Braindump2go and Download Full Version JN0-103 Exam DumpsMaruf AhmedNo ratings yet
- Vestas SparesDocument43 pagesVestas SparesbalaNo ratings yet
- Chapter 1 Production Planning and ControlDocument32 pagesChapter 1 Production Planning and Controlnescafe okNo ratings yet
- Ds Bps K PFC Melcher Series-1665524Document29 pagesDs Bps K PFC Melcher Series-1665524toxicelNo ratings yet
- Target Group One Go... : Communicate With atDocument2 pagesTarget Group One Go... : Communicate With atarcade20011No ratings yet
- Calys 50: Field Multifunction Calibrator For Basic UseDocument9 pagesCalys 50: Field Multifunction Calibrator For Basic UsegandjiNo ratings yet
- 18MIS7020 - Lab 2Document8 pages18MIS7020 - Lab 2Abhinav GNo ratings yet
- The Kenya National Examinations Council: The 2018 Kcse Examination Timetable, Instructions & GuidelinesDocument8 pagesThe Kenya National Examinations Council: The 2018 Kcse Examination Timetable, Instructions & Guidelinesal lakwenaNo ratings yet
- Project SynopsisDocument16 pagesProject SynopsisPriyanshu MangalNo ratings yet
- Cobetter Lab Catalog 2017 PDFDocument51 pagesCobetter Lab Catalog 2017 PDFYilun LiuNo ratings yet
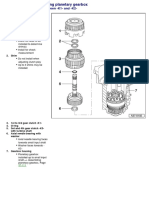
- III - Adjusting Clutch Play Between - K1-And - K2-: To Adjust The Clutch Play, Install Components Without Shim(s) (ItemDocument9 pagesIII - Adjusting Clutch Play Between - K1-And - K2-: To Adjust The Clutch Play, Install Components Without Shim(s) (ItemВадим УрупаNo ratings yet
- Thesis Printing LancasterDocument4 pagesThesis Printing Lancastersarahgriffinbatonrouge100% (1)
- KP-200p User ManualDocument13 pagesKP-200p User ManualPedro G MoraisNo ratings yet
- Summative Test in Empowerment 2020 2021Document3 pagesSummative Test in Empowerment 2020 2021RubenNo ratings yet
- Feasibility Study ExampleDocument3 pagesFeasibility Study Examplewmarcia20050% (2)
- 2014 07 26 20 59 01 73604 Resume - Prachita - PujariF PDFDocument2 pages2014 07 26 20 59 01 73604 Resume - Prachita - PujariF PDFergerNo ratings yet
- Unps Lab Manual PDFDocument23 pagesUnps Lab Manual PDFshubhNo ratings yet
- Nessus 8 0Document397 pagesNessus 8 0Emtv EloisaNo ratings yet
- 5100333-02 - Salwico Cargo Conventional - Installation Manual - M - EN - 2018 - XDocument96 pages5100333-02 - Salwico Cargo Conventional - Installation Manual - M - EN - 2018 - XAdegbola AdedipeNo ratings yet
- Equipment RentalDocument1 pageEquipment RentalKate Perez50% (2)
- Kalinga National High School: S V S V S - V V V S S S V S S V SDocument4 pagesKalinga National High School: S V S V S - V V V S S S V S S V SHydralyn PalchanNo ratings yet
- LORsDocument3 pagesLORsKishore MadugulaNo ratings yet
- Exponential Smoothing Example:: Single Years Quarter Period Sales Avg A (T) /avgDocument6 pagesExponential Smoothing Example:: Single Years Quarter Period Sales Avg A (T) /avgchikomborero maranduNo ratings yet
- Contoh Soal Materi Bab 2 BinggrisDocument5 pagesContoh Soal Materi Bab 2 Binggrisersa wahyu100% (1)
- Google and AWS CloudComputing PDFDocument16 pagesGoogle and AWS CloudComputing PDFDP MulluruNo ratings yet
- According To Merriam Webster Dictionary-1Document2 pagesAccording To Merriam Webster Dictionary-1Claud NineNo ratings yet
- Motor Overhaul SOP-DRSSBDocument51 pagesMotor Overhaul SOP-DRSSBKholis JaimonNo ratings yet