Download as pdf or txt
You might also like
- Project-Global Temperature Change-Student GuideDocument4 pagesProject-Global Temperature Change-Student GuideAlejandro Garcia0% (1)
- Manual Unity Pro PDFDocument612 pagesManual Unity Pro PDFThais Pontes0% (2)
- Xian Latent Embeddings For CVPR 2016 PaperDocument9 pagesXian Latent Embeddings For CVPR 2016 PaperHenri MindjanaNo ratings yet
- Blitznet: A Real-Time Deep Network For Scene UnderstandingDocument11 pagesBlitznet: A Real-Time Deep Network For Scene Understandingumme sultanaNo ratings yet
- 1 Mukherjee2017 PDFDocument5 pages1 Mukherjee2017 PDFkvinothscetNo ratings yet
- Scene Parse Camera ReadyDocument9 pagesScene Parse Camera ReadyGARCIA LARA LUIS FERNANDO SEBASTIANNo ratings yet
- Wang Weakly-Supervised Instance Segmentation Via Class-Agnostic Learning With Salient Images CVPR 2021 PaperDocument11 pagesWang Weakly-Supervised Instance Segmentation Via Class-Agnostic Learning With Salient Images CVPR 2021 PapersourachakraNo ratings yet
- Monnier Unsupervised Layered Image Decomposition Into Object Prototypes ICCV 2021 PaperDocument11 pagesMonnier Unsupervised Layered Image Decomposition Into Object Prototypes ICCV 2021 PaperCarlos JavierNo ratings yet
- Lign Deform Subtract N Interventional Framework For Explaining Object DifferencesDocument11 pagesLign Deform Subtract N Interventional Framework For Explaining Object DifferencesajgallegoNo ratings yet
- IET Electronics Letters TemplateDocument3 pagesIET Electronics Letters TemplateVerdi bobNo ratings yet
- Wu Unsupervised Joint 3D Object Model Learning and 6D Pose Estimation ICCVW 2019 PaperDocument10 pagesWu Unsupervised Joint 3D Object Model Learning and 6D Pose Estimation ICCVW 2019 PaperIbon MerinoNo ratings yet
- Learning To Predict Layout-To-Image Conditional Convolutions For Semantic Image SynthesisDocument15 pagesLearning To Predict Layout-To-Image Conditional Convolutions For Semantic Image Synthesisgabrieldelgado190420No ratings yet
- Xu DisCoScene Spatially Disentangled Generative Radiance Fields For Controllable 3D-Aware Scene CVPR 2023 PaperDocument11 pagesXu DisCoScene Spatially Disentangled Generative Radiance Fields For Controllable 3D-Aware Scene CVPR 2023 PaperS Divakar BhatNo ratings yet
- Censoring Sensitive Data From ImagesDocument6 pagesCensoring Sensitive Data From ImagesCS1-50 JESSY J DNo ratings yet
- Ruiz DreamBooth Fine Tuning Text-to-Image Diffusion Models For Subject-Driven Generation CVPR 2023 PaperDocument11 pagesRuiz DreamBooth Fine Tuning Text-to-Image Diffusion Models For Subject-Driven Generation CVPR 2023 Paperyz-zhao20No ratings yet
- Cross-Modal Contrastive Learning For Text-to-Image GenerationDocument19 pagesCross-Modal Contrastive Learning For Text-to-Image Generationkhalida rakhmiNo ratings yet
- Paper 14Document3 pagesPaper 14RimNo ratings yet
- Object Detection and Recognition: Final Project TitleDocument6 pagesObject Detection and Recognition: Final Project TitleZeyad EtmanNo ratings yet
- Image-Based 3D Reconstruction Neural Networks vs. Multiview GeometryDocument7 pagesImage-Based 3D Reconstruction Neural Networks vs. Multiview Geometryvivian yulie Quintero BarreraNo ratings yet
- Journal Pre-Proofs: NeurocomputingDocument37 pagesJournal Pre-Proofs: NeurocomputingsourachakraNo ratings yet
- Realpoint3D: Point Cloud Generation From A Single Image With Complex BackgroundDocument8 pagesRealpoint3D: Point Cloud Generation From A Single Image With Complex Backgroundorhema olugaNo ratings yet
- Sketchygan: Towards Diverse and Realistic Sketch To Image SynthesisDocument10 pagesSketchygan: Towards Diverse and Realistic Sketch To Image SynthesisaaaNo ratings yet
- Edge To Image Reconstruction Using Pix2pix Conditional GanDocument6 pagesEdge To Image Reconstruction Using Pix2pix Conditional GanSoumya PolisettyNo ratings yet
- Pointwise Convolutional Neural NetworksDocument10 pagesPointwise Convolutional Neural NetworkscuimosemailNo ratings yet
- S - S L C - C G A N: EMI Upervised Earning With Ontext Onditional Enerative Dversarial EtworksDocument10 pagesS - S L C - C G A N: EMI Upervised Earning With Ontext Onditional Enerative Dversarial EtworksHuWalterNo ratings yet
- 20116-Article Text-24129-1-2-20220628Document9 pages20116-Article Text-24129-1-2-20220628muantanamoNo ratings yet
- NeurIPS 2023 Paintseg Painting Pixels For Training Free Segmentation Paper ConferenceDocument22 pagesNeurIPS 2023 Paintseg Painting Pixels For Training Free Segmentation Paper ConferencefordicusoNo ratings yet
- Random Walks For Image Segmentation: Leo GradyDocument17 pagesRandom Walks For Image Segmentation: Leo GradyUnaixa KhanNo ratings yet
- Segmentation Transformer: Object-Contextual Representations For Semantic SegmentationDocument21 pagesSegmentation Transformer: Object-Contextual Representations For Semantic Segmentationherst1934No ratings yet
- SSAP: Single-Shot Instance Segmentation With Affinity PyramidDocument10 pagesSSAP: Single-Shot Instance Segmentation With Affinity Pyramidhvnth_88No ratings yet
- LVIS: A Dataset For Large Vocabulary Instance SegmentationDocument11 pagesLVIS: A Dataset For Large Vocabulary Instance SegmentationGaston GBNo ratings yet
- Capnet: Continuous Approximation Projection For 3D Point Cloud Reconstruction Using 2D SupervisionDocument8 pagesCapnet: Continuous Approximation Projection For 3D Point Cloud Reconstruction Using 2D SupervisionArmandoNo ratings yet
- Unsupervised Learning of Probably Symmetric Deformable 3D Objects From Images in The Wild (Invited Paper)Document14 pagesUnsupervised Learning of Probably Symmetric Deformable 3D Objects From Images in The Wild (Invited Paper)Diego LabastidaNo ratings yet
- Contrastive Learning For Unpaired Image-to-Image TranslationDocument29 pagesContrastive Learning For Unpaired Image-to-Image TranslationPixel DinosaurNo ratings yet
- Detecting and Sketching The Common CVPR10Document8 pagesDetecting and Sketching The Common CVPR10abhinNo ratings yet
- Object Detection and Localization: Academic Session 2022/2023Document37 pagesObject Detection and Localization: Academic Session 2022/2023muhammed suhailNo ratings yet
- Pathak Context Encoders Feature CVPR 2016 PaperDocument9 pagesPathak Context Encoders Feature CVPR 2016 PaperMubarik Hanif20No ratings yet
- 2020 CS182 Section 7 NotesDocument5 pages2020 CS182 Section 7 NotesHasimNo ratings yet
- Mimic and Fool SystemDocument7 pagesMimic and Fool SystemSoumadeep SahaNo ratings yet
- Luo Etal Cvpr16Document9 pagesLuo Etal Cvpr16Chulbul PandeyNo ratings yet
- Seamless Scene Segmentation: Lorenzo Porzi, Samuel Rota Bul'o, Aleksander Colovic, Peter Kontschieder Mapillary ResearchDocument11 pagesSeamless Scene Segmentation: Lorenzo Porzi, Samuel Rota Bul'o, Aleksander Colovic, Peter Kontschieder Mapillary Researchtmreddy1945No ratings yet
- Posecnn: A Convolutional Neural Network For 6D Object Pose Estimation in Cluttered ScenesDocument10 pagesPosecnn: A Convolutional Neural Network For 6D Object Pose Estimation in Cluttered ScenesAnhNguyễnNo ratings yet
- Es Como AlgoDocument14 pagesEs Como AlgoPeter Arámbula VegaNo ratings yet
- The Sketchy Database: Learning To Retrieve Badly Drawn BunniesDocument12 pagesThe Sketchy Database: Learning To Retrieve Badly Drawn BunniesnazibNo ratings yet
- Deng 17 ADocument10 pagesDeng 17 ADante NoguezNo ratings yet
- RR 3Document2 pagesRR 3Gayathri GirishNo ratings yet
- Robotics VisionDocument21 pagesRobotics Visionعلي قاسم الموسويNo ratings yet
- Learning Video Object Segmentation From Static ImagesDocument10 pagesLearning Video Object Segmentation From Static ImagesJunaid KNo ratings yet
- MaskDocument12 pagesMaskjkdngdfjkgndNo ratings yet
- Paper 11-Shape Prediction Linear Algorithm Using FuzzyDocument5 pagesPaper 11-Shape Prediction Linear Algorithm Using FuzzyEditor IJACSANo ratings yet
- 16219-Article Text-19713-1-2-20210518Document8 pages16219-Article Text-19713-1-2-20210518Bowen SiNo ratings yet
- Jain OneFormer One Transformer To Rule Universal Image Segmentation CVPR 2023 PaperDocument10 pagesJain OneFormer One Transformer To Rule Universal Image Segmentation CVPR 2023 PaperKarthick MohanrajNo ratings yet
- NNDL Unit 5Document21 pagesNNDL Unit 5T. S kesavNo ratings yet
- Oquab Is Object Localization 2015 CVPR PaperDocument10 pagesOquab Is Object Localization 2015 CVPR PaperranruvvrrNo ratings yet
- Indian Institute OF Information Technology Allahabad: Text To Image SynthesisDocument8 pagesIndian Institute OF Information Technology Allahabad: Text To Image SynthesisMayank BharatiNo ratings yet
- Labeling 2Document4 pagesLabeling 2Budi PurnomoNo ratings yet
- Learning Hierarchical Features For Scene LabelingDocument15 pagesLearning Hierarchical Features For Scene LabelingkiltzNo ratings yet
- 4103-Article Text-7157-1-10-20190704Document8 pages4103-Article Text-7157-1-10-20190704rr parafinaNo ratings yet
- CCF-Net: A Cascade Center-Based Framework Towards E Cient Human Parts DetectionDocument13 pagesCCF-Net: A Cascade Center-Based Framework Towards E Cient Human Parts Detectionwang elleryNo ratings yet
- Maskrcnn PDFDocument12 pagesMaskrcnn PDFrcNo ratings yet
- DenseCap - Fully Convolutional Localization Networks For Dense CaptioningDocument10 pagesDenseCap - Fully Convolutional Localization Networks For Dense CaptioningInstaNo ratings yet
- Variational End-to-End Navigation and Localization: Alexander Amini, Guy Rosman, Sertac Karaman and Daniela RusDocument7 pagesVariational End-to-End Navigation and Localization: Alexander Amini, Guy Rosman, Sertac Karaman and Daniela Rustmreddy1945No ratings yet
- Seamless Scene Segmentation: Lorenzo Porzi, Samuel Rota Bul'o, Aleksander Colovic, Peter Kontschieder Mapillary ResearchDocument11 pagesSeamless Scene Segmentation: Lorenzo Porzi, Samuel Rota Bul'o, Aleksander Colovic, Peter Kontschieder Mapillary Researchtmreddy1945No ratings yet
- CAM-Convs: Camera-Aware Multi-Scale Convolutions For Single-View DepthDocument10 pagesCAM-Convs: Camera-Aware Multi-Scale Convolutions For Single-View Depthtmreddy1945No ratings yet
- An End-to-End Network For Panoptic Segmentation: Traditional MethodDocument10 pagesAn End-to-End Network For Panoptic Segmentation: Traditional Methodtmreddy1945No ratings yet
- BSA Adult Application 524 501 2020.02 Fillable FORMDocument3 pagesBSA Adult Application 524 501 2020.02 Fillable FORMtmreddy1945No ratings yet
- Hawk-Alert-08 19 22Document12 pagesHawk-Alert-08 19 22tmreddy1945No ratings yet
- Dev - Info (&pdev - Dev, "2. UIO Waked Up Task and Cleared Irq Status With Mask 0x%0x", 1u Irq - SRC)Document6 pagesDev - Info (&pdev - Dev, "2. UIO Waked Up Task and Cleared Irq Status With Mask 0x%0x", 1u Irq - SRC)tmreddy1945No ratings yet
- Oct Supplementary Charts 4thDocument5 pagesOct Supplementary Charts 4thtmreddy1945No ratings yet
- Hidden Hills Elementary School: Home of The HawksDocument10 pagesHidden Hills Elementary School: Home of The Hawkstmreddy1945No ratings yet
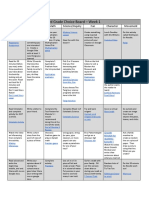
- 3rd Grade Choice Board Week 1Document1 page3rd Grade Choice Board Week 1tmreddy1945No ratings yet
- Ipc DecodeDocument1 pageIpc Decodetmreddy1945No ratings yet
- Computer Networking: Q1. What Is Bluetooth Transmission Technology? How Is It Useful? What Are Its Drawbacks?Document3 pagesComputer Networking: Q1. What Is Bluetooth Transmission Technology? How Is It Useful? What Are Its Drawbacks?Gourav VaidhyaNo ratings yet
- Reliability & Maintainability Exam Solutions 2012Document14 pagesReliability & Maintainability Exam Solutions 2012luchogilmourNo ratings yet
- Lecture 1 Course Goals Aims Plan OKDocument13 pagesLecture 1 Course Goals Aims Plan OKMuhammad Farrukh ShahabNo ratings yet
- LogDocument84 pagesLogputri sulungNo ratings yet
- Awb200 Poh v.2.0.1Document180 pagesAwb200 Poh v.2.0.1Allanpilot100% (2)
- Delock Usb-C™, Hdmi or Mini Displayport To 4K Hdmi Adapter Cable 1.8 MDocument3 pagesDelock Usb-C™, Hdmi or Mini Displayport To 4K Hdmi Adapter Cable 1.8 MMihanikNo ratings yet
- Tower AnatomyDocument12 pagesTower Anatomyazamislam727843No ratings yet
- Shurjoint 2017 Installation InstructionsDocument241 pagesShurjoint 2017 Installation InstructionsbalotNo ratings yet
- New Supplier Quality Manual Training ModuleDocument119 pagesNew Supplier Quality Manual Training ModuleMohit Singh100% (1)
- Rate Analysis Bhojpur For Contractor 2075-076Document51 pagesRate Analysis Bhojpur For Contractor 2075-076Karun BamanuNo ratings yet
- Final - Practical - Exam 608 ADocument3 pagesFinal - Practical - Exam 608 AsachinNo ratings yet
- (Premier Reference Source) Mark Grimshaw, Mark Grimshaw - Game Sound Technology and Player Interaction - Concepts and Developments (2010, IGI Global)Document504 pages(Premier Reference Source) Mark Grimshaw, Mark Grimshaw - Game Sound Technology and Player Interaction - Concepts and Developments (2010, IGI Global)bg takarNo ratings yet
- Capstone Project ReportDocument38 pagesCapstone Project ReportKEERTHANA V 20BCE1561No ratings yet
- Rumus Dasar Well ControlDocument2 pagesRumus Dasar Well Controlwindaru kusumaNo ratings yet
- BRKACI-2004-How To Setup An ACI Fabric From ScratchDocument29 pagesBRKACI-2004-How To Setup An ACI Fabric From ScratchSandroNo ratings yet
- Influocial Digital Portfolio-2021Document11 pagesInfluocial Digital Portfolio-2021Influocial Technologies Pvt Ltd100% (1)
- Gen Guide Conc Segment AlDocument10 pagesGen Guide Conc Segment AlMarkNo ratings yet
- Chapter 2 Quadratic FunctionDocument3 pagesChapter 2 Quadratic Functionmunxin02No ratings yet
- Revision Test 5 Maximum Marks 50 Answer All Questions Duration 2.00 HrsDocument1 pageRevision Test 5 Maximum Marks 50 Answer All Questions Duration 2.00 HrsGlan DevadhasNo ratings yet
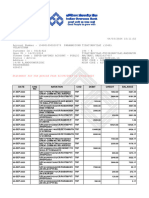
- Statement 194801000020579Document11 pagesStatement 194801000020579ssm.thisaiyanvilaihdbfsNo ratings yet
- Why-Is-A-System-Proposal-So-Crucial-For-System-Design 2Document3 pagesWhy-Is-A-System-Proposal-So-Crucial-For-System-Design 2GlobeNo ratings yet
- PDF The Art of Safety Auditing A Tutorial For Regulators 1St Edition Sasho Andonov Author Ebook Full ChapterDocument53 pagesPDF The Art of Safety Auditing A Tutorial For Regulators 1St Edition Sasho Andonov Author Ebook Full Chaptermegan.field949100% (1)
- Mechanics For Healthy Cooking Contest - NM2021 - For PaxDocument3 pagesMechanics For Healthy Cooking Contest - NM2021 - For PaxFe An CabreraNo ratings yet
- Windows Deployment Services (WDS) : Presented by - Ashwani Kumar - System Admin I (Windows Server) - 01 March 2023Document36 pagesWindows Deployment Services (WDS) : Presented by - Ashwani Kumar - System Admin I (Windows Server) - 01 March 2023Sakshi GuptaNo ratings yet
- 009-Measuring Tape - Steel RuleDocument4 pages009-Measuring Tape - Steel RuleAjlan KhanNo ratings yet
- DTV Group: Positions Job Description CertificationDocument6 pagesDTV Group: Positions Job Description CertificationhdnutzNo ratings yet
- 12-1 Rework-IDEF0 Process Mapping-LendingDocument8 pages12-1 Rework-IDEF0 Process Mapping-LendingjuniorNo ratings yet
- Training On ISO/IEC 17065: 2012 ISO/IEC 17065: 2012 Conformity Assessment - Requirements For Bodies Certifying Products, Processes and ServicesDocument82 pagesTraining On ISO/IEC 17065: 2012 ISO/IEC 17065: 2012 Conformity Assessment - Requirements For Bodies Certifying Products, Processes and ServicesR C MathewNo ratings yet