Download as pdf or txt
You might also like
- PS421 Alstom ManualDocument10 pagesPS421 Alstom ManualSalvadi EsvaranNo ratings yet
- Spir Ident Mobile Advanced Spectroscopy PlatformDocument4 pagesSpir Ident Mobile Advanced Spectroscopy PlatformxjmnNo ratings yet
- Enhancing The Precision of Artillery Rockets Using Pulsejet Control Systems With Active DampingDocument10 pagesEnhancing The Precision of Artillery Rockets Using Pulsejet Control Systems With Active DampingWick JhonNo ratings yet
- Very Affordable Precision ProjectileDocument19 pagesVery Affordable Precision ProjectileАлександар НуждићNo ratings yet
- Antenna Training System: Scientech 2262ADocument2 pagesAntenna Training System: Scientech 2262AMbah GoogleNo ratings yet
- 2020.01.10 - Georeferencing of The UltraCam D ImagesDocument2 pages2020.01.10 - Georeferencing of The UltraCam D ImagesarashNo ratings yet
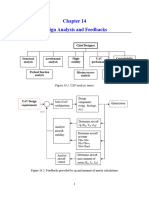
- CH 14 FiguresDocument10 pagesCH 14 FiguresamroushararaNo ratings yet
- Scientech-2261ADocument2 pagesScientech-2261Amanual imb100% (1)
- Rendering Part2 EDocument103 pagesRendering Part2 Epietro fischettiNo ratings yet
- Telescopic Crane: With Telescoping Monitoring SystemDocument2 pagesTelescopic Crane: With Telescoping Monitoring SystemEduardo Macario AmbrosioNo ratings yet
- Eddycon C-CLDocument6 pagesEddycon C-CLTYO WIBOWONo ratings yet
- An 2557Document9 pagesAn 2557anonymous2018 decemberNo ratings yet
- Ad Gamma Camera FinalDocument27 pagesAd Gamma Camera FinalAryff Loc0% (1)
- Applsci 10 03467 PDFDocument18 pagesApplsci 10 03467 PDFmohdsameenNo ratings yet
- Image ProductionDocument234 pagesImage Productiongilikarn9960No ratings yet
- Angle Analyzer Analyzer of An Encoder Using The Labview Using TheDocument4 pagesAngle Analyzer Analyzer of An Encoder Using The Labview Using TheChâu Tinh TrìNo ratings yet
- Oea 2 10 190011 1Document8 pagesOea 2 10 190011 1Nicolas RodriguezNo ratings yet
- Multi-Frequency Synthetic-Aperture Imaging With A Lightweight Ground Penetrating Radar SystemDocument8 pagesMulti-Frequency Synthetic-Aperture Imaging With A Lightweight Ground Penetrating Radar SystemFaisal Khotibul AmriNo ratings yet
- Dokumen - Tips - Introduction To Applications in Robotics To Roboticsppt Real Time VideoDocument78 pagesDokumen - Tips - Introduction To Applications in Robotics To Roboticsppt Real Time VideoManh Cuong NguyenNo ratings yet
- RIEGL BDF-1 Datasheet 2017-08-31Document4 pagesRIEGL BDF-1 Datasheet 2017-08-31Andi PatriadiNo ratings yet
- Robotpilóta Rendszerek: Budapesti Műszaki EgyetemDocument78 pagesRobotpilóta Rendszerek: Budapesti Műszaki EgyetemNaguibNo ratings yet
- Drone PID Controller LabDocument8 pagesDrone PID Controller Labjoshimeet479No ratings yet
- Three Dimensional Guidance and Control For Ground Moving Target Tracking by A QuadrotorDocument28 pagesThree Dimensional Guidance and Control For Ground Moving Target Tracking by A QuadrotorjusticembamNo ratings yet
- Three Dimensional Guidance and Control For Ground Moving Target Tracking by A QuadrotorDocument28 pagesThree Dimensional Guidance and Control For Ground Moving Target Tracking by A QuadrotorjusticembamNo ratings yet
- Actuator Disc Modelling For Helicopter Rotors-ChuitonDocument13 pagesActuator Disc Modelling For Helicopter Rotors-ChuitonsemihbayirNo ratings yet
- Introduction To ImmDocument83 pagesIntroduction To ImmAchintya SarkarNo ratings yet
- Johnson 2013Document5 pagesJohnson 2013Jose Jesus Salceda AngelNo ratings yet
- Optimal Performance Design Guideline of Hybrid Reference Frame-Based Dual Loop Control Strategy For Stand-Alone Single-Phase InvertersDocument10 pagesOptimal Performance Design Guideline of Hybrid Reference Frame-Based Dual Loop Control Strategy For Stand-Alone Single-Phase InvertersAnass BakNo ratings yet
- Folleto SC-50Document4 pagesFolleto SC-50Juan VillanuevaNo ratings yet
- Optimization and L3Document62 pagesOptimization and L3er.anilyadav1993No ratings yet
- 6th International Conference & Exposition On Petroleum Geophysics "Kolkata 2006"Document6 pages6th International Conference & Exposition On Petroleum Geophysics "Kolkata 2006"blasuaNo ratings yet
- Flight Stability and Control and Performance Results From The Linear Aerospike SR-71 Experiment (Lasre)Document30 pagesFlight Stability and Control and Performance Results From The Linear Aerospike SR-71 Experiment (Lasre)Kleon TriantafillidisNo ratings yet
- Digital Controller Design For Buck and Boost Converters Using Root Locus TechniquesDocument6 pagesDigital Controller Design For Buck and Boost Converters Using Root Locus Techniquesprasanna workcloudNo ratings yet
- R&S NRP-Power-MeterDocument40 pagesR&S NRP-Power-MeterSeven PinkNo ratings yet
- REF615 Standard ConfigurationDocument11 pagesREF615 Standard Configurationmaruf048No ratings yet
- Shao Xiong2015Document5 pagesShao Xiong2015Thông VõNo ratings yet
- Sight System 1K13Document2 pagesSight System 1K13anumula.sandeepNo ratings yet
- (A9) Outdoor Autonomous Landing On A Moving Platform For Quadrotors Using An Omnidirecional Camera PDFDocument10 pages(A9) Outdoor Autonomous Landing On A Moving Platform For Quadrotors Using An Omnidirecional Camera PDFGiovanni GozziniNo ratings yet
- 004-What PA Can DoDocument26 pages004-What PA Can DoShravanKumar JingarNo ratings yet
- NG 10 Flyer 09 2011 627d145122Document2 pagesNG 10 Flyer 09 2011 627d145122SatheeshNo ratings yet
- 2021 Calibration of Geometric Parameters and Error Compensation of Non-Geometric Parameters For Cable-Driven Parallel RobotsDocument12 pages2021 Calibration of Geometric Parameters and Error Compensation of Non-Geometric Parameters For Cable-Driven Parallel RobotsThanh Hai NguyenNo ratings yet
- NBCDO MC - 02 - s2015 PDFDocument4 pagesNBCDO MC - 02 - s2015 PDFEli NaguitNo ratings yet
- Small Scale Helicopter Analysis and Controller Design For Non-Aggressive FlightsDocument8 pagesSmall Scale Helicopter Analysis and Controller Design For Non-Aggressive FlightsWindhi AerospaceNo ratings yet
- NG 10 Flyer 09 2011 627d145122Document8 pagesNG 10 Flyer 09 2011 627d145122SatheeshNo ratings yet
- NG 10 Flyer 09 2011 627d145123Document4 pagesNG 10 Flyer 09 2011 627d145123SatheeshNo ratings yet
- PV System Performance MonitoringDocument12 pagesPV System Performance Monitoringdreadknight22No ratings yet
- Isonic 2009 Pa Matrix Srut GWDocument3 pagesIsonic 2009 Pa Matrix Srut GWChandrashekhar ThiramdasuNo ratings yet
- Drufelcnc Nvum4-Sp 4 Axis (Novusun) Installation ManualDocument39 pagesDrufelcnc Nvum4-Sp 4 Axis (Novusun) Installation ManualVyacheslavNo ratings yet
- Application of Optimization Technique For Compensator Design ofDocument8 pagesApplication of Optimization Technique For Compensator Design ofGayathri GnanaiyaNo ratings yet
- Dis21 Setting Guide v1.1Document43 pagesDis21 Setting Guide v1.1hathanhchinh2279No ratings yet
- Types Oc Cad/cam SystemDocument40 pagesTypes Oc Cad/cam SystemDrPrashant D KambleNo ratings yet
- Reserch On Digital Closed-Loop Control For Silicon Resonant AccelerometerDocument4 pagesReserch On Digital Closed-Loop Control For Silicon Resonant AccelerometerjhvghvghjvgjhNo ratings yet
- Oscilloscope: Academic PresentationDocument14 pagesOscilloscope: Academic PresentationRahul ShindeNo ratings yet
- Tips of Learning and PID ControlDocument42 pagesTips of Learning and PID ControlfinnandzestzuNo ratings yet
- Experimental Study of High-Speed Rough-Terrain Mobile Robot Models For Reactive BehaviorsDocument10 pagesExperimental Study of High-Speed Rough-Terrain Mobile Robot Models For Reactive BehaviorsLuis VelascoNo ratings yet
- Trimble AP50: Key FeaturesDocument2 pagesTrimble AP50: Key FeaturesluisaNo ratings yet
- 2018 - Decentralized PID Control by Using GA Optimization Applied To A QuadrotorDocument13 pages2018 - Decentralized PID Control by Using GA Optimization Applied To A Quadrotorjanuszszo95No ratings yet
- Projectile Performance, Stability, and Free-Flight Motion Prediction Using Computational Fluid DynamicsDocument8 pagesProjectile Performance, Stability, and Free-Flight Motion Prediction Using Computational Fluid DynamicsMarcelo MartinezNo ratings yet
- Scanline Rendering: Exploring Visual Realism Through Scanline Rendering TechniquesFrom EverandScanline Rendering: Exploring Visual Realism Through Scanline Rendering TechniquesNo ratings yet
- Towards Unmanned Autonomous Road Vehicles Through BuildingDocument9 pagesTowards Unmanned Autonomous Road Vehicles Through BuildingAntonio Pérez AlonsoNo ratings yet
- Testing An Anti Tank Missile Model With Jet Simulation in The T-35Document7 pagesTesting An Anti Tank Missile Model With Jet Simulation in The T-35Antonio Pérez AlonsoNo ratings yet
- Probability of Armoured Targets Destruction by Means of InfantryDocument8 pagesProbability of Armoured Targets Destruction by Means of InfantryAntonio Pérez AlonsoNo ratings yet
- Possibility of The FEM Application For A Stress Condition Analysis ofDocument6 pagesPossibility of The FEM Application For A Stress Condition Analysis ofAntonio Pérez AlonsoNo ratings yet
- Repair of G4 Aircraft Heavily Damaged by FireDocument8 pagesRepair of G4 Aircraft Heavily Damaged by FireAntonio Pérez AlonsoNo ratings yet
- Choice and Analysis of The Launcher Interface Optimal Solution For AnDocument5 pagesChoice and Analysis of The Launcher Interface Optimal Solution For AnAntonio Pérez AlonsoNo ratings yet
- Diagnostic Systems in Aircraft Engines MaintenanceDocument5 pagesDiagnostic Systems in Aircraft Engines MaintenanceAntonio Pérez AlonsoNo ratings yet
- Choice and Analysis of A Block of Electronics For The Antitank GuidedDocument9 pagesChoice and Analysis of A Block of Electronics For The Antitank GuidedAntonio Pérez AlonsoNo ratings yet
- Choice and Analysis of The Anti-Tank Guided Missile Interface OptimalDocument7 pagesChoice and Analysis of The Anti-Tank Guided Missile Interface OptimalAntonio Pérez AlonsoNo ratings yet
- Invitation Letter Kutahya Dumlupinar UniversityDocument1 pageInvitation Letter Kutahya Dumlupinar UniversityAntonio Pérez AlonsoNo ratings yet
- Academic Situation Antonio PerezDocument4 pagesAcademic Situation Antonio PerezAntonio Pérez AlonsoNo ratings yet
- HM 230 Flow of Compressible UidsDocument1 pageHM 230 Flow of Compressible UidsOda DemissieNo ratings yet
- Emv Data Generation Javascript Extensions: Reference ManualDocument123 pagesEmv Data Generation Javascript Extensions: Reference ManualMustapha El AlaouiNo ratings yet
- Centrifugal Pumps PDFDocument54 pagesCentrifugal Pumps PDFthomastheinkyaw100% (1)
- Leaked Babuk Code Ignites VMware ESXi RansomwareDocument2 pagesLeaked Babuk Code Ignites VMware ESXi Ransomwarefauzeeyah adepojuNo ratings yet
- Rabupura - Tender DocumentDocument57 pagesRabupura - Tender Documentankur yadavNo ratings yet
- 1N5822 - DatasheetDocument3 pages1N5822 - Datasheetjohny_mlNo ratings yet
- DTC 51Document4 pagesDTC 51victorNo ratings yet
- Lesson 2 - ICT in The ClassroomDocument4 pagesLesson 2 - ICT in The ClassroomcharmaineNo ratings yet
- Springfield Custom FormDocument8 pagesSpringfield Custom FormLarry KenshinNo ratings yet
- 9.3.1.2 EIGRP Capstone Project Instructions IGDocument18 pages9.3.1.2 EIGRP Capstone Project Instructions IGEdward Joseph TagleNo ratings yet
- Leo50a en PDFDocument2 pagesLeo50a en PDFAliasgher ViraniNo ratings yet
- 2022 Nissan Kicks Owner ManualDocument564 pages2022 Nissan Kicks Owner ManualtratidaNo ratings yet
- Niagara 1200 Manual ENDocument28 pagesNiagara 1200 Manual ENPeter HNo ratings yet
- Demand Management Schedule From 21-22 April 2022: Period GroupDocument36 pagesDemand Management Schedule From 21-22 April 2022: Period Grouphansikamedagedara179No ratings yet
- Duties and ResponsibilitiesDocument6 pagesDuties and ResponsibilitiesVholts Villa VitugNo ratings yet
- JNTUA Database Management Systems Notes - R20Document143 pagesJNTUA Database Management Systems Notes - R202021cse.rl1No ratings yet
- 8th - English - WWW - Tntextbooks.inDocument240 pages8th - English - WWW - Tntextbooks.indinesh kannanNo ratings yet
- UCO Sample Papers For Class 4Document7 pagesUCO Sample Papers For Class 4Riddhima VarshneyNo ratings yet
- Performa Apply For Ddo PowerDocument1 pagePerforma Apply For Ddo PowerINDRI SALINDER SINGHNo ratings yet
- PalaoDLP 3Document12 pagesPalaoDLP 3Bae Dashlea Agan PalaoNo ratings yet
- Hadoop Admin Download Syllabus PDFDocument4 pagesHadoop Admin Download Syllabus PDFshubham phulariNo ratings yet
- WC DraftDocument55 pagesWC DraftArun Kumar ChakrabortyNo ratings yet
- Staff Commitment On Cyber Security and User Privacy Template SignedDocument2 pagesStaff Commitment On Cyber Security and User Privacy Template Signed1No ratings yet
- Game Simulasi Kerja Praktek Mahasiswa Fakultas Teknologi Informasi Universitas Bale Bandung Menggunakan Unreal Engine 4Document9 pagesGame Simulasi Kerja Praktek Mahasiswa Fakultas Teknologi Informasi Universitas Bale Bandung Menggunakan Unreal Engine 4Fikri MaulanaNo ratings yet
- Ultracapacitors (Supercapacitors)Document19 pagesUltracapacitors (Supercapacitors)praneethNo ratings yet
- Business Communication MCQs Related To Email - CSEET - Artha CSDocument17 pagesBusiness Communication MCQs Related To Email - CSEET - Artha CSindhumathigNo ratings yet
- User Manual of NA201Document13 pagesUser Manual of NA201Ariel BruniNo ratings yet
- E-3 - Lighting LayoutDocument1 pageE-3 - Lighting LayoutfelixNo ratings yet
- 3BDD012902 DMFF ConfigurationDocument448 pages3BDD012902 DMFF ConfigurationOmar AlfaroNo ratings yet
- 8.2 UHP-M 1.2m Dual Polarization Compact C3 Antenna Datasheet (AXXD12MAC-3NX)Document4 pages8.2 UHP-M 1.2m Dual Polarization Compact C3 Antenna Datasheet (AXXD12MAC-3NX)Nomaan MalikNo ratings yet