Download as docx, pdf, or txt
You might also like
- Obstacle Avoidance Robotic Vehicle Using Ultrasonic Sensor and Arduino MicrocontrollerDocument5 pagesObstacle Avoidance Robotic Vehicle Using Ultrasonic Sensor and Arduino MicrocontrollerkentNo ratings yet
- WiFi Function Manual of Charge Point-181030 PDFDocument16 pagesWiFi Function Manual of Charge Point-181030 PDFfreesonNo ratings yet
- The Case of The Port of Antwerp PDFDocument11 pagesThe Case of The Port of Antwerp PDFCastilla CarlosNo ratings yet
- Truck Systems Design Handbook PT 41 P 62519365Document5 pagesTruck Systems Design Handbook PT 41 P 62519365Shaswat SinghNo ratings yet
- BCIPECH-2022 Paper 7075Document3 pagesBCIPECH-2022 Paper 7075AaNo ratings yet
- Gourav Final Report Addhar 123Document14 pagesGourav Final Report Addhar 123Divyansh MathurNo ratings yet
- Ijet 11990Document4 pagesIjet 11990Bipul BiswasNo ratings yet
- Smart Floor Cleaner Robot Using AndroidDocument5 pagesSmart Floor Cleaner Robot Using AndroidTejas chogale100% (1)
- FireDocument14 pagesFireffire0502No ratings yet
- Obstacle Avoiding Car: Sir Bhavsinhji Polytechnic Institute, BhavnagarDocument15 pagesObstacle Avoiding Car: Sir Bhavsinhji Polytechnic Institute, BhavnagarIron man SafariNo ratings yet
- School of Electronics Engineering (Sense) : "Robotics Arm and 2D ConstructionDocument10 pagesSchool of Electronics Engineering (Sense) : "Robotics Arm and 2D ConstructionGowri ShankarNo ratings yet
- Obstacle Avoiding Robot ReportDocument32 pagesObstacle Avoiding Robot ReportBro100% (1)
- Autonomous Floor Cleaning Robot With Infrared and UltrasonicDocument7 pagesAutonomous Floor Cleaning Robot With Infrared and UltrasonicInternational Journal of Innovative Science and Research Technology100% (1)
- Line Follower Robot Final PPT 1Document16 pagesLine Follower Robot Final PPT 1harshil mangeNo ratings yet
- Agricultural Robot: Raginee Shukla, R.B.KaleDocument2 pagesAgricultural Robot: Raginee Shukla, R.B.KaleerpublicationNo ratings yet
- Automatic Vacuum Cleaner: Ministry of Higher Education Herat University Engineering Faculty Mechatronics DepartmentDocument13 pagesAutomatic Vacuum Cleaner: Ministry of Higher Education Herat University Engineering Faculty Mechatronics DepartmentAziz KhaliliNo ratings yet
- Final ProposalDocument13 pagesFinal ProposalAzizNo ratings yet
- IEEE Report - B3 - G1 - 53 - 54 - 55 - 56 - 57Document7 pagesIEEE Report - B3 - G1 - 53 - 54 - 55 - 56 - 57TanayNo ratings yet
- Bore-Well Rescue RobotDocument23 pagesBore-Well Rescue RobotRahul PawarNo ratings yet
- Automation of Floor Cleaning RobotDocument6 pagesAutomation of Floor Cleaning RobotIJRASETPublicationsNo ratings yet
- Android Phone Controlled Bluetooth Robot: April 2016Document12 pagesAndroid Phone Controlled Bluetooth Robot: April 2016Fakhr Al-TimimiNo ratings yet
- Line Following Robot: Bachelor of TechnologyDocument14 pagesLine Following Robot: Bachelor of TechnologyGorilla WebDevNo ratings yet
- Design and Development of Automatic Seed Sowing Machine: P. Premalatha and Sharath SinghDocument4 pagesDesign and Development of Automatic Seed Sowing Machine: P. Premalatha and Sharath SinghTeshome GetachewNo ratings yet
- SUMOBOT Docu PDFDocument4 pagesSUMOBOT Docu PDFFreddie MendezNo ratings yet
- Digital Electronics - Arduino Robot ProjectDocument17 pagesDigital Electronics - Arduino Robot ProjectWri AnNo ratings yet
- Robotic Arm: MimickingDocument5 pagesRobotic Arm: MimickingMaitriya DamaniNo ratings yet
- PC Controlled WirelessDocument30 pagesPC Controlled WirelessHemantYadavNo ratings yet
- Pothole Filler ReportDocument77 pagesPothole Filler Reportkrishna patil100% (2)
- Abhishak PR Sem 6Document13 pagesAbhishak PR Sem 6Iron man SafariNo ratings yet
- Vaishali Paper (Finalized)Document4 pagesVaishali Paper (Finalized)soumiyaNo ratings yet
- Smit PR Sem 6Document13 pagesSmit PR Sem 6Iron man SafariNo ratings yet
- Credit Card Fra-WPS OfficeDocument47 pagesCredit Card Fra-WPS Officedeepakkewatkewat5No ratings yet
- SmartvacuumrobotDocument6 pagesSmartvacuumrobotBhavana DornalaNo ratings yet
- Under The Guidance Of:-Mr. Prahakant Dwivedi (Assistant Professor)Document17 pagesUnder The Guidance Of:-Mr. Prahakant Dwivedi (Assistant Professor)Aastha SrivastavaNo ratings yet
- Major ProjectDocument47 pagesMajor Projectdeepakkewatkewat5No ratings yet
- Infrared Remote Control With A Social RobotDocument21 pagesInfrared Remote Control With A Social RobotJeevan HansdahNo ratings yet
- Android Phone Controlled Bluetooth RobotDocument12 pagesAndroid Phone Controlled Bluetooth RobotNazmul Shikder RiyadhNo ratings yet
- Automatic Floor Cleaning Robot Using EncoderDocument4 pagesAutomatic Floor Cleaning Robot Using EncoderEditor IJTSRDNo ratings yet
- Iot Based Sanitization Robot Using Raspberry Pi Zero W and Uv LampDocument30 pagesIot Based Sanitization Robot Using Raspberry Pi Zero W and Uv LampNexgen TechnologyNo ratings yet
- Floor PROJECT-1Document14 pagesFloor PROJECT-120mec03vetrivelNo ratings yet
- IJCRT2207414 Mini Project Reasearch PaperDocument10 pagesIJCRT2207414 Mini Project Reasearch PaperHimanshu KumarNo ratings yet
- Agrobot: Agriculture Assistance Robot Using Rocker Bogie Mechanism and Image ProcessingDocument5 pagesAgrobot: Agriculture Assistance Robot Using Rocker Bogie Mechanism and Image ProcessingKanna MonishNo ratings yet
- LINE FOLLOWER ROBOT AS A MEDICINE SUPPLIER IN HOSPITAL DURING COVID-19 PANDEMIC USING MICROCONTROLLERDocument28 pagesLINE FOLLOWER ROBOT AS A MEDICINE SUPPLIER IN HOSPITAL DURING COVID-19 PANDEMIC USING MICROCONTROLLERVinita KushwahaNo ratings yet
- A Technical Seminar Report 443Document31 pagesA Technical Seminar Report 443Gayathri YaddalaNo ratings yet
- Speech Recognition System For A Voice CoDocument5 pagesSpeech Recognition System For A Voice Cosyiham487No ratings yet
- Solar Panel Cleaning RobotDocument14 pagesSolar Panel Cleaning RobotLê Thu NguyetNo ratings yet
- سفاريDocument3 pagesسفاريhawrasdqNo ratings yet
- Obstacle Aviodance Robot Using Arduino: P.Iswarya D.Ramarao B.Dileep Kumar K.Dileep Kumar T.ManikyalaraoDocument7 pagesObstacle Aviodance Robot Using Arduino: P.Iswarya D.Ramarao B.Dileep Kumar K.Dileep Kumar T.ManikyalaraoPramod TNo ratings yet
- Fire Fighting RobotDocument60 pagesFire Fighting RobotkalaivaniNo ratings yet
- Obstacle Detection Robot Using 8051 Microcontroller: Palaparthi AbhijithDocument29 pagesObstacle Detection Robot Using 8051 Microcontroller: Palaparthi Abhijithrelangi jashwanthNo ratings yet
- Speech Recognition System For A Voice Controlled Robot With Real Time Obstacle Detection and AvoidanceDocument5 pagesSpeech Recognition System For A Voice Controlled Robot With Real Time Obstacle Detection and AvoidanceMansi YadavNo ratings yet
- Irjet V7i61194Document4 pagesIrjet V7i61194Aryan ShrivaNo ratings yet
- Ete Ece491Document21 pagesEte Ece491sushantsaurav18No ratings yet
- House Cleaning Robot: Digital Assignment - I Iot System ArchitectureDocument6 pagesHouse Cleaning Robot: Digital Assignment - I Iot System Architecturescanning &No ratings yet
- LFR ReportDocument91 pagesLFR ReportRahul Salim NarayananNo ratings yet
- Line Follower RobotDocument30 pagesLine Follower RobotNeetu Bansal100% (6)
- Updated Self Balancing Report (F16mte28)Document25 pagesUpdated Self Balancing Report (F16mte28)Shahrukh Aleem JhatialNo ratings yet
- Engineering the Future at the Intersection: Groundbreaking Advances in Mechanical EngineeringFrom EverandEngineering the Future at the Intersection: Groundbreaking Advances in Mechanical EngineeringNo ratings yet
- Practical Power Electronics: Applications, Experiments and AnimationsFrom EverandPractical Power Electronics: Applications, Experiments and AnimationsNo ratings yet
- Digital Electronics with Arduino: Learn How To Work With Digital Electronics And MicroControllersFrom EverandDigital Electronics with Arduino: Learn How To Work With Digital Electronics And MicroControllersRating: 5 out of 5 stars5/5 (1)
- Practical, Made Easy Guide To Robotics & Automation [Revised Edition]From EverandPractical, Made Easy Guide To Robotics & Automation [Revised Edition]Rating: 1 out of 5 stars1/5 (1)
- Alpha Beta Pruning ExampleDocument1 pageAlpha Beta Pruning ExampleSUHOJINNo ratings yet
- A Star ExampleDocument1 pageA Star ExampleSUHOJINNo ratings yet
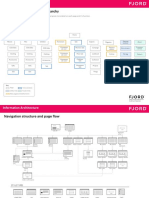
- Information Architecture MapDocument2 pagesInformation Architecture MapSUHOJINNo ratings yet
- Timetable by YushDocument1 pageTimetable by YushSUHOJINNo ratings yet
- G10-2nd-Q-review Sheets-Chem-Chap7, 8.1, 8.2Document8 pagesG10-2nd-Q-review Sheets-Chem-Chap7, 8.1, 8.2Karim Ahmed100% (1)
- Sumg100 GasDocument32 pagesSumg100 Gascomunicacion socialNo ratings yet
- Infinity Users GuideDocument172 pagesInfinity Users GuideSridhar DasariNo ratings yet
- Textile Trade in BangladeshDocument5 pagesTextile Trade in BangladeshSanghamitra DasNo ratings yet
- Design and Manufacturing of A Prototype Multipurpose Robot Capable of Military ActionDocument6 pagesDesign and Manufacturing of A Prototype Multipurpose Robot Capable of Military ActionInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- UntitledDocument1,251 pagesUntitledMaria Jose Santos silvaNo ratings yet
- Indium ISAFE OverviewDocument12 pagesIndium ISAFE OverviewShahinsha SNo ratings yet
- Assesment of Ammoniacal Ammonium Sulphate Leachins As A Pretreatment Process For Copper Bearing Gold OresDocument7 pagesAssesment of Ammoniacal Ammonium Sulphate Leachins As A Pretreatment Process For Copper Bearing Gold OresZeryan GuerraNo ratings yet
- Checkliste - Leistungstabelle R44 Raven IIDocument2 pagesCheckliste - Leistungstabelle R44 Raven IIAfonso Henrique Rodrigues LonghiNo ratings yet
- Sewers For Adoption: - A Design and Construction Guide For Developers - Small Developments Version - September 2013Document48 pagesSewers For Adoption: - A Design and Construction Guide For Developers - Small Developments Version - September 2013humayriNo ratings yet
- Living As Jesus LivedDocument46 pagesLiving As Jesus LivedCosmin Ghirisan100% (1)
- Envi Reporting PDFDocument206 pagesEnvi Reporting PDFlawrenceandrew ditanNo ratings yet
- 1677071391BS German Final Term Result Jan 2023Document2 pages1677071391BS German Final Term Result Jan 2023Raja ZainNo ratings yet
- Infection Control PDFDocument52 pagesInfection Control PDFahmadzikrulmuhtadinNo ratings yet
- WorkDocument8 pagesWorkapi-604146541No ratings yet
- Lesson Plan in ScienceDocument3 pagesLesson Plan in ScienceJesza May JuabanNo ratings yet
- Unfinished Pow UTOLDocument251 pagesUnfinished Pow UTOLresty tacataNo ratings yet
- Ana&Physio 16 - Human DevelopmentDocument37 pagesAna&Physio 16 - Human DevelopmentShery Han Bint HindawiNo ratings yet
- Unit 3 BiodiversityDocument19 pagesUnit 3 BiodiversityDristi Namchoom GohainNo ratings yet
- Portfolio Composition and Backtesting: Dakota WixomDocument34 pagesPortfolio Composition and Backtesting: Dakota WixomGedela BharadwajNo ratings yet
- Comparison Subpart Q Vs New FTL 030314Document20 pagesComparison Subpart Q Vs New FTL 030314TomaszUchańskiNo ratings yet
- Post Tensioning System July 2018Document12 pagesPost Tensioning System July 2018pandianNo ratings yet
- Cosmology GitaDocument122 pagesCosmology GitabaijumohanNo ratings yet
- Chap 2 Psychological Testing NormsDocument35 pagesChap 2 Psychological Testing NormsAmna KhanNo ratings yet
- GPNA-BoneSubstituteBrochure Single FINAL PDFDocument16 pagesGPNA-BoneSubstituteBrochure Single FINAL PDFPratyusha VallamNo ratings yet
- List of Approved Vendors QAM 25.04.2017 FinalDocument59 pagesList of Approved Vendors QAM 25.04.2017 FinalMayank Singhania100% (1)
- Compression Molding and Injection MoldDocument23 pagesCompression Molding and Injection MoldKodhansNo ratings yet






























































![Practical, Made Easy Guide To Robotics & Automation [Revised Edition]](https://imgv2-2-f.scribdassets.com/img/word_document/253466853/149x198/4281882d40/1709916831?v=1)