Download as pdf or txt
You might also like
- PROJECT RIPORT ChapterDocument16 pagesPROJECT RIPORT Chapterdarkfire28304No ratings yet
- Elesys: User'S ManualDocument86 pagesElesys: User'S ManualEri Wanto SihombingNo ratings yet
- EJ501 T2 Logical Sensor and ActuatorDocument53 pagesEJ501 T2 Logical Sensor and ActuatorLoga HSNo ratings yet
- Industrial Drives & Its ApplicationsDocument25 pagesIndustrial Drives & Its ApplicationsShankar BaddurNo ratings yet
- PowerCommand 500 550 Remote Monitoring System Specification SheetDocument7 pagesPowerCommand 500 550 Remote Monitoring System Specification SheetCarlos AguiarNo ratings yet
- Servo MotorDocument11 pagesServo MotorBotlhe SomolekaeNo ratings yet
- DC Servomotors Assignment 02Document5 pagesDC Servomotors Assignment 02Saad BhattiNo ratings yet
- Servo MotorDocument31 pagesServo Motoradiamiru25% (4)
- Servo MotorDocument21 pagesServo MotorsafvanshaikhNo ratings yet
- PLC & HMI Interfacing For AC Servo Drive: Naveen Kumar E T.V.Snehaprabha Senthil KumarDocument5 pagesPLC & HMI Interfacing For AC Servo Drive: Naveen Kumar E T.V.Snehaprabha Senthil KumarNay Ba LaNo ratings yet
- Servo MotorDocument41 pagesServo MotorVaibhav Patil100% (1)
- User Manual: Programmable Automation Controller AMC 300Document38 pagesUser Manual: Programmable Automation Controller AMC 300FrijoNo ratings yet
- Servo MotorDocument17 pagesServo MotorAswathy SimonNo ratings yet
- Online Monitoring DevicesDocument17 pagesOnline Monitoring Devicesyogi_swarnNo ratings yet
- Role of WaqfDocument13 pagesRole of Waqfdkhana243No ratings yet
- Class 2: Servomotors - Basics & Working: Ice 3015: Control System ComponentsDocument19 pagesClass 2: Servomotors - Basics & Working: Ice 3015: Control System ComponentsArchit DasguptaNo ratings yet
- Servo Motor SystemDocument8 pagesServo Motor SystemAnonymous Y7WZ3dqoXhNo ratings yet
- Servo MotorsDocument27 pagesServo Motorsc_archana100% (1)
- Air Polution Control - Project (Rockwell)Document16 pagesAir Polution Control - Project (Rockwell)Chandan MandalNo ratings yet
- Mechatronics ActuatorDocument22 pagesMechatronics ActuatorSuresh Kumar GNo ratings yet
- Stepper Motor & Servo Motor: S.RavisubramanianDocument78 pagesStepper Motor & Servo Motor: S.RavisubramanianRajesh Vella100% (3)
- Experiment No: 2: AIM: To Study and Simulate Single Phase Semi Control of DC Separately Excited MotorDocument29 pagesExperiment No: 2: AIM: To Study and Simulate Single Phase Semi Control of DC Separately Excited MotorPratik K AnandparaNo ratings yet
- Index: Introduction About Automation. o o o o Inroduction To PLC o o o o o o o o o o o o o o o o o o o o o o oDocument37 pagesIndex: Introduction About Automation. o o o o Inroduction To PLC o o o o o o o o o o o o o o o o o o o o o o oHappy ShubhamNo ratings yet
- PLC Chapter 2 Input-Out DevicesDocument21 pagesPLC Chapter 2 Input-Out DevicesANIK Kumar SannasiNo ratings yet
- mk2200 ManualDocument56 pagesmk2200 ManualRosmadi AbdullahNo ratings yet
- IM Speed Control Sep2023Document47 pagesIM Speed Control Sep2023Ashwini SinghNo ratings yet
- 1106-E66TAG Sales PresentationDocument13 pages1106-E66TAG Sales Presentationakheel201No ratings yet
- In The Name of Allah The Most Benificet and The Most MercifulDocument24 pagesIn The Name of Allah The Most Benificet and The Most MercifulAsad RazaNo ratings yet
- Medical Application of BLDCDocument5 pagesMedical Application of BLDCAbd Al HAmidNo ratings yet
- EST3 Installation and Service ManualDocument386 pagesEST3 Installation and Service ManualБахтияр ЮмачиковNo ratings yet
- Background of Control SystemsDocument39 pagesBackground of Control SystemsJMNo ratings yet
- PT150 Mini Inverter ManualDocument36 pagesPT150 Mini Inverter ManualCarlos BenitesNo ratings yet
- Automation and Relay Functions - Catalogue 2003.12Document273 pagesAutomation and Relay Functions - Catalogue 2003.12Sarah RichardNo ratings yet
- Industrial Automation - Presentation-ShamsherDocument29 pagesIndustrial Automation - Presentation-ShamsherMd Shamsher0% (1)
- Electrical Drives and Control Important QuestionsDocument1 pageElectrical Drives and Control Important QuestionsBala Kumar100% (1)
- Unit 1-MECHATRONICS, SENSORS AND TRANSDUCERSDocument55 pagesUnit 1-MECHATRONICS, SENSORS AND TRANSDUCERSRamanathanDurai100% (3)
- Ignition Systems For Gasoline EnginesDocument27 pagesIgnition Systems For Gasoline Enginesanon_53273932No ratings yet
- Skills Competition (Mechatronics)Document13 pagesSkills Competition (Mechatronics)Putri Chairany100% (1)
- T568 3BUS095490B FreelanceDocument2 pagesT568 3BUS095490B Freelancedave chaudhuryNo ratings yet
- ACTUATION SYSTEMS Unit 2Document40 pagesACTUATION SYSTEMS Unit 2RamanathanDurai100% (2)
- Lecture 3 Example of Mechatronic SystemDocument36 pagesLecture 3 Example of Mechatronic SystemIljuha9No ratings yet
- Standard Ac GeneratorDocument52 pagesStandard Ac GeneratorKhaled GouarahNo ratings yet
- DC Motor DrivesDocument26 pagesDC Motor DrivesSudhir P BhatNo ratings yet
- sb06 06 r3Document3 pagessb06 06 r3Henry Huayhua100% (1)
- SKEM 3742 Electro Hydraulic LabsheetDocument6 pagesSKEM 3742 Electro Hydraulic Labsheetcikgu_relaNo ratings yet
- Class 10: Zeroing Synchros: Ice 3015: Control System ComponentsDocument18 pagesClass 10: Zeroing Synchros: Ice 3015: Control System ComponentsmeenasundarNo ratings yet
- Maintenance of Hydraulic Systems-10Document13 pagesMaintenance of Hydraulic Systems-10hermansyah herman100% (1)
- Sinamics v90 PDFDocument364 pagesSinamics v90 PDFSharon ShajiNo ratings yet
- Engine Maintenance Ankit AmityDocument19 pagesEngine Maintenance Ankit AmityAnonymous x07rAkLDONo ratings yet
- Experiments EMS IIDocument117 pagesExperiments EMS IIOsama Tahir100% (1)
- Control Engineering 2018-02Document54 pagesControl Engineering 2018-02Zigor Larrabe UribeNo ratings yet
- Unit 2 - Hydraulic Actuators and MotorsDocument38 pagesUnit 2 - Hydraulic Actuators and MotorsAnirudh SrinivasNo ratings yet
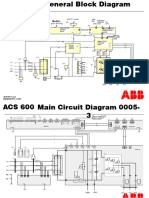
- MaincircuitDocument11 pagesMaincircuitdamirNo ratings yet
- GMC rm003 - en PDocument120 pagesGMC rm003 - en PHilder Ramirez PuellesNo ratings yet
- ATS Control Panel-EnGDocument4 pagesATS Control Panel-EnGRobertoSoares100% (1)
- Four Quadrant DC Motor Control Without MicrocontrollerDocument2 pagesFour Quadrant DC Motor Control Without Microcontrollerjayonline_4uNo ratings yet
- Ee342 - Pid Controllers - 2020Document42 pagesEe342 - Pid Controllers - 2020ShadrackNo ratings yet
- Presentacion SM6Document61 pagesPresentacion SM6dniel7100% (1)
- Comparison Hydrostatic Leadscrews Linear Motors and BallscrewsDocument4 pagesComparison Hydrostatic Leadscrews Linear Motors and BallscrewsJavierNo ratings yet
- Nada Casi Ijett-V69i9p201Document14 pagesNada Casi Ijett-V69i9p201JavierNo ratings yet
- VALE Linear Axis 1Document80 pagesVALE Linear Axis 1JavierNo ratings yet
- Algo Teoría Inglés 50139835-MitDocument358 pagesAlgo Teoría Inglés 50139835-MitJavierNo ratings yet
- Algo Inglés Hepcomotion Updated Uk Dls Catalogue Text 09-09-13 MinDocument32 pagesAlgo Inglés Hepcomotion Updated Uk Dls Catalogue Text 09-09-13 MinJavierNo ratings yet
- NADA INGLÉS IndexDocument3 pagesNADA INGLÉS IndexJavierNo ratings yet
- Algo Servo Am8100 Ba enDocument50 pagesAlgo Servo Am8100 Ba enJavierNo ratings yet
- ALGOubc 2005-0581Document167 pagesALGOubc 2005-0581JavierNo ratings yet
- Motores Paso A Paso Ingles 3Document8 pagesMotores Paso A Paso Ingles 3JavierNo ratings yet
- Direct - Drive - Linear-Motors enDocument7 pagesDirect - Drive - Linear-Motors enJavierNo ratings yet
- Tipos de Movimiento Lineal InglesDocument15 pagesTipos de Movimiento Lineal InglesJavierNo ratings yet
- 3.2009 Fujimoto T-IEDocument9 pages3.2009 Fujimoto T-IEJavier0% (1)
- BasicInformation Linear MotorDocument32 pagesBasicInformation Linear MotorJavierNo ratings yet
- Design and Performance Index Comparison of The Permanent Magnet Linear MotorDocument8 pagesDesign and Performance Index Comparison of The Permanent Magnet Linear MotorJavierNo ratings yet
- PDF ExplicativoDocument53 pagesPDF ExplicativoJavierNo ratings yet
- PDF Explicativo 30-40Document11 pagesPDF Explicativo 30-40JavierNo ratings yet
- PDF Explicativo 40-53Document14 pagesPDF Explicativo 40-53JavierNo ratings yet
- PDF Explicativo 15-30Document16 pagesPDF Explicativo 15-30JavierNo ratings yet
- PDF Explicativo 1-15Document15 pagesPDF Explicativo 1-15JavierNo ratings yet