Download as pdf or txt
You might also like
- Kristle Joy Dimayuga - Activity 1Document5 pagesKristle Joy Dimayuga - Activity 1Kristle Dimayuga100% (3)
- VFS60A-SZPZ0-S01: Motor Feedback Systems Rotary IncrementalDocument8 pagesVFS60A-SZPZ0-S01: Motor Feedback Systems Rotary IncrementalMonete FlorinNo ratings yet
- Encoder SIck AFM60A-BDE018X12Document9 pagesEncoder SIck AFM60A-BDE018X12Andrei DanaiataNo ratings yet
- DataSheet SFS60-HRAT0K02 1050530 EnDocument7 pagesDataSheet SFS60-HRAT0K02 1050530 EnsunanNo ratings yet
- Sick EncoderDocument6 pagesSick EncoderUsman KhanNo ratings yet
- Encoder DBS36E-BBEP01000 1064687 enDocument8 pagesEncoder DBS36E-BBEP01000 1064687 enTomasz KownackiNo ratings yet
- Datasheet DFS60B-S1PL10000 1036758 enDocument9 pagesDatasheet DFS60B-S1PL10000 1036758 enJoelson MeneghelliNo ratings yet
- CFS50-AZZ0-S04: Motor Feedback Systems Rotary Incremental With CommutationDocument7 pagesCFS50-AZZ0-S04: Motor Feedback Systems Rotary Incremental With CommutationSinan AslanerNo ratings yet
- Datasheet SRS50-HEA0-K21 1037083 en PDFDocument6 pagesDatasheet SRS50-HEA0-K21 1037083 en PDFAliRouyouNo ratings yet
- Datasheet DFS60A-S4EC65536 1037907 enDocument10 pagesDatasheet DFS60A-S4EC65536 1037907 enMuhammad Ahsan SaleemNo ratings yet
- Encoder Rebo Rusa Antigua Dfs60e-Bhcm01000 - 1038159Document8 pagesEncoder Rebo Rusa Antigua Dfs60e-Bhcm01000 - 1038159colines surpackNo ratings yet
- Datasheet SKS36-HFA0-S05 1037139 enDocument6 pagesDatasheet SKS36-HFA0-S05 1037139 enleandroNo ratings yet
- Dbs50e S5ek00500Document6 pagesDbs50e S5ek00500ganiNo ratings yet
- Datasheet ACM60B-S1KE13x06 6045312 enDocument6 pagesDatasheet ACM60B-S1KE13x06 6045312 enWahyu TryNo ratings yet
- Datasheet CFS50-AFV12X03 1058458 enDocument7 pagesDatasheet CFS50-AFV12X03 1058458 enjulian sanchezNo ratings yet
- Datasheet SKS36-HFA2-S01 1074339 enDocument7 pagesDatasheet SKS36-HFA2-S01 1074339 enSantiago GallingerNo ratings yet
- Datasheet SKM36S-HFA0-S01 1083412 en PDFDocument7 pagesDatasheet SKM36S-HFA0-S01 1083412 en PDFMahmood JosheghanNo ratings yet
- Datasheet DFS60B-BHPC10000 1036779 enDocument9 pagesDatasheet DFS60B-BHPC10000 1036779 enSyamsulNo ratings yet
- DataSheet SRS50-HZA0-S21 1037395 enDocument6 pagesDataSheet SRS50-HZA0-S21 1037395 enhamid.rajaeipoorNo ratings yet
- Datasheet DFV60A-22PC65536 1051309 enDocument9 pagesDatasheet DFV60A-22PC65536 1051309 enAdria PlayNo ratings yet
- Datasheet DRS61-A4A08192 1034985 enDocument4 pagesDatasheet DRS61-A4A08192 1034985 enDarwin DuqueNo ratings yet
- Encoder SICKDocument8 pagesEncoder SICKTomasz KownackiNo ratings yet
- Datasheet PKS09-ATBM0520 1035243 enDocument6 pagesDatasheet PKS09-ATBM0520 1035243 enTim JohnsonNo ratings yet
- Ultrasonic SensorsDocument7 pagesUltrasonic SensorsluatNo ratings yet
- s5 DatasheetDocument7 pagess5 DatasheetHan MoreyraNo ratings yet
- DataSheet SRM50-HZZ0-S45 1084505 enDocument6 pagesDataSheet SRM50-HZZ0-S45 1084505 enagus sutiawanNo ratings yet
- Datasheet DFS60B-S1PA10000 1036755 enDocument11 pagesDatasheet DFS60B-S1PA10000 1036755 enDenny MaiaNo ratings yet
- Datasheet A3M60A-BEPB014x17 1053332 enDocument8 pagesDatasheet A3M60A-BEPB014x17 1053332 enRadu StamatinNo ratings yet
- 1SCA120268R1001 Os160gd21lrDocument4 pages1SCA120268R1001 Os160gd21lrMabna TavanNo ratings yet
- Datasheet WT27-2R610 1015091 enDocument6 pagesDatasheet WT27-2R610 1015091 enmanuelfpmgaNo ratings yet
- Ultrasonic SensorsDocument7 pagesUltrasonic Sensorsl1f3b00kNo ratings yet
- Cat C80 eDocument2 pagesCat C80 eparalaxa.tpNo ratings yet
- Encoder Siemens 6fx2001-5wd13-0aa1Document3 pagesEncoder Siemens 6fx2001-5wd13-0aa1oswaldoNo ratings yet
- 1SCA114221R1001 Os160gd03Document4 pages1SCA114221R1001 Os160gd03nguyenbuiytot04102004No ratings yet
- Rhd8000en B 06 - 2007Document14 pagesRhd8000en B 06 - 2007Mahmoud AlswisyNo ratings yet
- Ficha Técnica - OVH SWITCHGEAR-TEC-0Document6 pagesFicha Técnica - OVH SWITCHGEAR-TEC-0Anthony Román V.No ratings yet
- Electronic Control Devices: Edition: 01/02.2018Document20 pagesElectronic Control Devices: Edition: 01/02.2018sfsdffdsdfsdfsdfNo ratings yet
- TPLCDocument2 pagesTPLCjohnta001No ratings yet
- r911338449 02 Salida AnalogicaDocument12 pagesr911338449 02 Salida Analogicasikas159No ratings yet
- Datasheet WL27-2R830 1016072 enDocument6 pagesDatasheet WL27-2R830 1016072 enRachid MoussaouiNo ratings yet
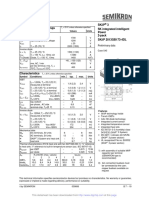
- Skiip 2013Gb173-4Dl I. Power Section Absolute Maximum Ratings Skiip 3 SK Integrated Intelligent Power 2-Pack Skiip 2013Gb173-4DlDocument2 pagesSkiip 2013Gb173-4Dl I. Power Section Absolute Maximum Ratings Skiip 3 SK Integrated Intelligent Power 2-Pack Skiip 2013Gb173-4Dljoe smythNo ratings yet
- Datasheet DBV50E-22AZZ0S02 1081113 enDocument8 pagesDatasheet DBV50E-22AZZ0S02 1081113 enMuharrem yapıcıNo ratings yet
- UntitledDocument2 pagesUntitledGab SotNo ratings yet
- TPLCEDocument2 pagesTPLCEjohnta001No ratings yet
- Test SetupDocument11 pagesTest SetupKarthik PariharNo ratings yet
- Datasheet ATM60-PAH13X13 1030015 enDocument7 pagesDatasheet ATM60-PAH13X13 1030015 enhebermarcussiNo ratings yet
- DataSheet MZT8-03VPS-KWX 1073405 enDocument6 pagesDataSheet MZT8-03VPS-KWX 1073405 enHasibul HasanNo ratings yet
- Catalog Chinese 201205 PDFDocument36 pagesCatalog Chinese 201205 PDFtitusaffectionativeNo ratings yet
- Datasheet KTM-MB31194P 1078048 enDocument7 pagesDatasheet KTM-MB31194P 1078048 enBhupendra SinghNo ratings yet
- GTB6-P4212: Miniature Photoelectric SensorsDocument7 pagesGTB6-P4212: Miniature Photoelectric SensorsAna Paula MuñozNo ratings yet
- EUC-026SxxxDS (PS) 2013042603092790611Document10 pagesEUC-026SxxxDS (PS) 2013042603092790611zanthoriusNo ratings yet
- SICK Ultrasonic Sensor UM30-213113Document7 pagesSICK Ultrasonic Sensor UM30-213113Adrian ZapataNo ratings yet
- Datasheet 8V1180002Document4 pagesDatasheet 8V1180002raghupathypsNo ratings yet
- 8BVI0055HWDS.000-1 enDocument10 pages8BVI0055HWDS.000-1 enReativa Engenharia ElétricaNo ratings yet
- Datasheet DM12Document9 pagesDatasheet DM12dff1967dffNo ratings yet
- LogoDocument3 pagesLogoConan VicNo ratings yet
- Extremely Accurate I C-Integrated RTC/TCXO/Crystal: General Description FeaturesDocument20 pagesExtremely Accurate I C-Integrated RTC/TCXO/Crystal: General Description FeaturesMilan Đokić100% (1)
- Datasheet KT6W-2N5116 1046010 enDocument8 pagesDatasheet KT6W-2N5116 1046010 enAldwinNo ratings yet
- Hall Effect at S 682 LSHDocument16 pagesHall Effect at S 682 LSHMichael IrvineNo ratings yet
- 38man SensorDocument40 pages38man SensorMohamed ElsayedNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Vital-1 - ManualDocument22 pagesVital-1 - ManualROBERTO RAMIREZNo ratings yet
- Bombas SRU ALFA LAVAL NATILLAS Y QUESO CREMA MANUALDocument58 pagesBombas SRU ALFA LAVAL NATILLAS Y QUESO CREMA MANUALROBERTO RAMIREZNo ratings yet
- APV Bombas Serie R3 Brochure Positive Displacement PumpDocument8 pagesAPV Bombas Serie R3 Brochure Positive Displacement PumpROBERTO RAMIREZNo ratings yet
- AK TRAN-COR® Curva de MagnetizacionDocument1 pageAK TRAN-COR® Curva de MagnetizacionROBERTO RAMIREZNo ratings yet
- 109is 37150 - 50310Document2 pages109is 37150 - 50310dip461No ratings yet
- 6 Noise and Multiple Attenuation PDFDocument164 pages6 Noise and Multiple Attenuation PDFFelipe CorrêaNo ratings yet
- Technical Guidelines: Physical Properties of Refrigerants R-410ADocument2 pagesTechnical Guidelines: Physical Properties of Refrigerants R-410AYaxmine Edward StylesNo ratings yet
- Competency Enhancing Courses Jan June2023Document2 pagesCompetency Enhancing Courses Jan June2023Yashveer TakooryNo ratings yet
- Philosophy of Educationsample Isms With Answersclue KeywordpdfDocument16 pagesPhilosophy of Educationsample Isms With Answersclue KeywordpdfScribdNo ratings yet
- Mark SheetDocument1 pageMark SheetLokeshNo ratings yet
- Bar Bending Schedule (Service BLDG)Document20 pagesBar Bending Schedule (Service BLDG)Rania SaiedNo ratings yet
- FCE Exam 3 ListeningDocument6 pagesFCE Exam 3 ListeningSaul MendozaNo ratings yet
- ThesisDocument29 pagesThesisJeliah Shello Sebastian ChuaNo ratings yet
- XSGlobe On Double Fold Seam En-Product DataDocument3 pagesXSGlobe On Double Fold Seam En-Product DataAdefisayo HaastrupNo ratings yet
- Porter's Generic Strategies: Cost Leadership DifferentiationDocument5 pagesPorter's Generic Strategies: Cost Leadership DifferentiationbiswasjoyNo ratings yet
- Hitachi Data Systems Foudations ModularDocument378 pagesHitachi Data Systems Foudations ModularZhenhai WeiNo ratings yet
- Valkokari TIMReview August2015Document8 pagesValkokari TIMReview August2015Héctor BallesterosNo ratings yet
- Checklist of RS WallDocument2 pagesChecklist of RS WallGDRPL NHAINo ratings yet
- Project Product DescriptionDocument5 pagesProject Product Descriptionpruebaproiba12No ratings yet
- Yamaha Xvs 125 PDFDocument71 pagesYamaha Xvs 125 PDFfrancoismagnyNo ratings yet
- UNIT I - Introduction To ManagementDocument37 pagesUNIT I - Introduction To ManagementPretentious PMRNo ratings yet
- I.K.Gujral Punjab Technical University Jalandhar: Grade Cum Marks SheetDocument1 pageI.K.Gujral Punjab Technical University Jalandhar: Grade Cum Marks SheetAyush KumarNo ratings yet
- Advance Data StructuresDocument184 pagesAdvance Data StructureskamsiNo ratings yet
- Vehicle ChecklistDocument1 pageVehicle ChecklistAbdus SamadNo ratings yet
- Gyroscopic PrinciplesDocument38 pagesGyroscopic PrinciplesAli Abu Shhiwa100% (1)
- Element Main - JsDocument51 pagesElement Main - JsjaaritNo ratings yet
- ACG StarterDocument1 pageACG StarterLeo HiterozaNo ratings yet
- Pca. Inglés 6toDocument15 pagesPca. Inglés 6toJuan Carlos Amores GuevaraNo ratings yet
- Stainless Steel - Grade 304 (UNS S30400) : Chemical Formula Topics CoveredDocument10 pagesStainless Steel - Grade 304 (UNS S30400) : Chemical Formula Topics CoveredprasobhaNo ratings yet
- RESEARCHDocument70 pagesRESEARCHRizza Manabat PacheoNo ratings yet
- Grade 9 Social Studies Textbook CbseDocument3 pagesGrade 9 Social Studies Textbook CbseKurtNo ratings yet
- Air Cabin TrainingDocument2 pagesAir Cabin TrainingVyl CebrerosNo ratings yet
- 5.5 CBM Waste Skip Open Top - POWER BearDocument1 page5.5 CBM Waste Skip Open Top - POWER Bearqtia71133No ratings yet