Download as pdf or txt
You might also like
- DD500 PatchesDocument15 pagesDD500 PatchesLucas EmannuelNo ratings yet
- Solution Manual For Discrete Time Signal Processing 3 E 3rd Edition Alan V Oppenheim Ronald W SchaferDocument4 pagesSolution Manual For Discrete Time Signal Processing 3 E 3rd Edition Alan V Oppenheim Ronald W SchaferHoward ZhangNo ratings yet
- Digital Power System ProtectionDocument273 pagesDigital Power System ProtectionVikash Kumar100% (9)
- Monsoon-Guide-1 2 1Document32 pagesMonsoon-Guide-1 2 1RJ BevyNo ratings yet
- Feature Selection UNIT 4Document40 pagesFeature Selection UNIT 4sujitha100% (2)
- Cables - Catenaries Example PDFDocument47 pagesCables - Catenaries Example PDFharlesNo ratings yet
- Computer Vision: Spring 2006 15-385,-685 Instructor: S. Narasimhan Wean 5403 T-R 3:00pm - 4:20pmDocument43 pagesComputer Vision: Spring 2006 15-385,-685 Instructor: S. Narasimhan Wean 5403 T-R 3:00pm - 4:20pmPandimadevi GanesanNo ratings yet
- Hough TransformDocument38 pagesHough Transformk191292 Hassan JamilNo ratings yet
- Shape DetectionDocument24 pagesShape DetectionToản LêNo ratings yet
- Image EnhancementDocument49 pagesImage EnhancementJani Saida ShaikNo ratings yet
- Wind Energy Supplier Pitch Deck by SlidesgoDocument7 pagesWind Energy Supplier Pitch Deck by SlidesgoShailesh ReddyNo ratings yet
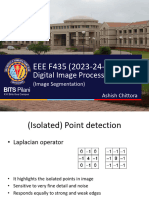
- Image SegmentationDocument36 pagesImage SegmentationA JNo ratings yet
- Hough Transform For Lines and Curves: CMPE 264: Image Analysis and Computer VisionDocument10 pagesHough Transform For Lines and Curves: CMPE 264: Image Analysis and Computer VisionMehak FatimaNo ratings yet
- ME5286 Lecture9 PDFDocument73 pagesME5286 Lecture9 PDFAmir RehmanNo ratings yet
- Developed Moment N Shear-AdcDocument1 pageDeveloped Moment N Shear-AdccivixxNo ratings yet
- Part Three: Linear Algebraic EquationsDocument9 pagesPart Three: Linear Algebraic Equationsrodi10No ratings yet
- Hough TransformDocument13 pagesHough TransformAkilesh ArigelaNo ratings yet
- MagnetismDocument3 pagesMagnetismYusuf MahdiNo ratings yet
- Costabile 2010Document9 pagesCostabile 2010Huy Ngọc DươngNo ratings yet
- Fitting: Voting and Hough Transform: Prof. Fei-Fei Li, Stanford UniversityDocument61 pagesFitting: Voting and Hough Transform: Prof. Fei-Fei Li, Stanford Universitypham tamNo ratings yet
- Hough TransformDocument16 pagesHough TransformFateeha Fatima TurkNo ratings yet
- Notes 1136 UNIT II Lesson 7 Shuchita Graphics Ellipses & CurvesDocument11 pagesNotes 1136 UNIT II Lesson 7 Shuchita Graphics Ellipses & Curveskomalkaushik1212No ratings yet
- Lecture 14Document73 pagesLecture 14Sourabh Sisodia SrßNo ratings yet
- C XCC Sec Maths Must Know ListDocument1 pageC XCC Sec Maths Must Know ListSwayne JamesNo ratings yet
- Shape Analysis Moment Invariants: Guido Gerig CS 7960, Spring 2010Document38 pagesShape Analysis Moment Invariants: Guido Gerig CS 7960, Spring 2010jose mercadoNo ratings yet
- ANALYTIC GEOMETRY Rev1Document8 pagesANALYTIC GEOMETRY Rev1HERMINIO MENDOZANo ratings yet
- Spatial Descriptions and Transformations: RoboticsDocument36 pagesSpatial Descriptions and Transformations: Robotics황무성No ratings yet
- Review Mathematics Vector XDocument2 pagesReview Mathematics Vector XalimwuladariNo ratings yet
- Class 12Document411 pagesClass 12Bhola SolankiNo ratings yet
- Things That Are CoolDocument12 pagesThings That Are CoolgoatcockNo ratings yet
- Calibration: Thanks To Ramani Duraiswami and Zhengyou Zhang For The Use of Some SlidesDocument38 pagesCalibration: Thanks To Ramani Duraiswami and Zhengyou Zhang For The Use of Some SlidesDavid LichaaNo ratings yet
- Detecting Shapes in Images Using The Hough Transform: From Matlab and Simulink To Real Time With Ti DspsDocument30 pagesDetecting Shapes in Images Using The Hough Transform: From Matlab and Simulink To Real Time With Ti DspsMallappa PatilNo ratings yet
- Set Theoretic OperationsDocument27 pagesSet Theoretic OperationsHerald RufusNo ratings yet
- L-02 Lines.6 PDFDocument9 pagesL-02 Lines.6 PDFnootiNo ratings yet
- Cross Section Area Centroid Moment of InertiaDocument3 pagesCross Section Area Centroid Moment of InertiaNguyễn Hồng Minh ThưNo ratings yet
- Chapter 6 (Graphs)Document17 pagesChapter 6 (Graphs)Shubham PriyamNo ratings yet
- Spline Models: - Introduction To CS and NCS - Regression Splines - Smoothing SplinesDocument24 pagesSpline Models: - Introduction To CS and NCS - Regression Splines - Smoothing SplinesDatpmNo ratings yet
- Lecture Week 2B 2018 PDFDocument87 pagesLecture Week 2B 2018 PDFalfalfa manNo ratings yet
- Lecture 2 Review Linear Algebra For ORDocument43 pagesLecture 2 Review Linear Algebra For ORsharef albarak100% (1)
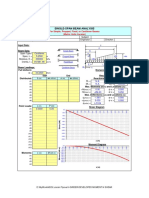
- Single-Span Beam Analysis: User Should Make Sure ToDocument1 pageSingle-Span Beam Analysis: User Should Make Sure TocivixxNo ratings yet
- Fixed BeamDocument20 pagesFixed BeamJaswant SharmaNo ratings yet
- Adobe Scan Mar 29, 2024Document9 pagesAdobe Scan Mar 29, 2024k.v.v.satyanarayanaNo ratings yet
- Complexity of Matrix Rank and RigidityDocument1 pageComplexity of Matrix Rank and RigidityDani GonzalezNo ratings yet
- Computational GeometryDocument2 pagesComputational Geometryneelpaigude8No ratings yet
- Hough TransformDocument8 pagesHough Transformأمين سيدNo ratings yet
- Chap. 6: Linear Algebra Matrices, Vectors, Determinants, Linear Systems of EquationsDocument31 pagesChap. 6: Linear Algebra Matrices, Vectors, Determinants, Linear Systems of EquationsBHUSHAM CHANDRASEKHARNo ratings yet
- M3 (3rd) May2018Document2 pagesM3 (3rd) May2018Abhinav SrivastavNo ratings yet
- Supervised Advance Test - 39Document14 pagesSupervised Advance Test - 39Dhruv BajajNo ratings yet
- Unit 1 Chapter 3: Quadratic FunctionsDocument18 pagesUnit 1 Chapter 3: Quadratic FunctionsZlata OsypovaNo ratings yet
- VectorDocument34 pagesVectorImam HossainNo ratings yet
- Report - Fortieth Canadian Mathematical Olympiad 2008Document6 pagesReport - Fortieth Canadian Mathematical Olympiad 2008hungkgNo ratings yet
- Perhitungan Kapasitas Struktur - Cendana IconDocument5 pagesPerhitungan Kapasitas Struktur - Cendana IconFirmansyahNo ratings yet
- (Chapter 2) Linear FunctionDocument17 pages(Chapter 2) Linear FunctiondenixngNo ratings yet
- Fabien Seyfert Filter WebinarDocument41 pagesFabien Seyfert Filter WebinarHüseyin Nuri GülmezNo ratings yet
- A Simple Exponential Integral Representation of The Generalized Marcum Q FunctionDocument7 pagesA Simple Exponential Integral Representation of The Generalized Marcum Q Functionsami_aldalahmehNo ratings yet
- CM2202 Geometric Computing 2DDocument50 pagesCM2202 Geometric Computing 2Dkhalil alhatabNo ratings yet
- Mathematical Tools in DIP - 2Document52 pagesMathematical Tools in DIP - 2sahilNo ratings yet
- Rotational Motion RACE-01Document3 pagesRotational Motion RACE-01Dheeraj AgarwalNo ratings yet
- 1 s2.0 S1474667016377849 MainDocument6 pages1 s2.0 S1474667016377849 Mainprachi singhNo ratings yet
- Cables Catenaries PDFDocument47 pagesCables Catenaries PDFsimple-CE-studNo ratings yet
- Matrix - Part 1Document25 pagesMatrix - Part 17 skyNo ratings yet
- Finding Basic Shapes: 6.1 Combining EdgesDocument18 pagesFinding Basic Shapes: 6.1 Combining EdgesHàng Không Mẫu Hạm100% (1)
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64From EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64No ratings yet
- Image EnhancementDocument49 pagesImage EnhancementJani Saida ShaikNo ratings yet
- VlsiDocument30 pagesVlsiJani Saida ShaikNo ratings yet
- EE 624 - Course Outline - 2023Document32 pagesEE 624 - Course Outline - 2023Jani Saida ShaikNo ratings yet
- Sampling QuantizationDocument46 pagesSampling QuantizationJani Saida ShaikNo ratings yet
- 4 - Probability TheoryDocument20 pages4 - Probability TheoryJani Saida ShaikNo ratings yet
- 2 - Linear AlgebraDocument52 pages2 - Linear AlgebraJani Saida ShaikNo ratings yet
- Image Filtering - 2Document59 pagesImage Filtering - 2Jani Saida ShaikNo ratings yet
- Image Filtering - 1Document83 pagesImage Filtering - 1Jani Saida ShaikNo ratings yet
- Image Processing QBDocument29 pagesImage Processing QBsubramanyam62100% (1)
- ECE216H1 2022 SolutionDocument4 pagesECE216H1 2022 SolutionhcxNo ratings yet
- Manual Berhinger Xenix 302 USBDocument8 pagesManual Berhinger Xenix 302 USBSergio RoqueNo ratings yet
- Chebyshev Low Pass Microwave Filter Design Using Open Circuited Stubs at 2 GHZDocument4 pagesChebyshev Low Pass Microwave Filter Design Using Open Circuited Stubs at 2 GHZPhani KumarNo ratings yet
- Am25ck PDFDocument2 pagesAm25ck PDFLogan Marquez AguayoNo ratings yet
- Digital Signal Processing c1Document20 pagesDigital Signal Processing c1Meliza SiotingNo ratings yet
- Dsp-محاضرات الكورس الاولDocument34 pagesDsp-محاضرات الكورس الاولMohammed YounisNo ratings yet
- An Introduction To Coding Theory: Adrish BanerjeeDocument15 pagesAn Introduction To Coding Theory: Adrish BanerjeeharryNo ratings yet
- Digital Radiograph TreeDocument957 pagesDigital Radiograph TreecutefrenzyNo ratings yet
- Digital Signal Processing: CourseDocument47 pagesDigital Signal Processing: CourseYasashiRikaiNo ratings yet
- Multimedia PresentationDocument16 pagesMultimedia PresentationHusain PoonawalaNo ratings yet
- New Ad Converter A7860l HCPL-7860L Sigma-Delta Modulator 5V Dip8 SMD HP DatasheetDocument30 pagesNew Ad Converter A7860l HCPL-7860L Sigma-Delta Modulator 5V Dip8 SMD HP DatasheetAUDIO Y VIDEO CDENo ratings yet
- AKG K240 Studio Spec SheetDocument2 pagesAKG K240 Studio Spec SheetRafael BritoNo ratings yet
- Infinity Basslink Manual PDFDocument56 pagesInfinity Basslink Manual PDFdisco8100% (1)
- Fast Image Blurring Using Lookup Table For RealDocument6 pagesFast Image Blurring Using Lookup Table For RealhimanshubhimaniNo ratings yet
- Course Policy-IVP July 2022-BTech-MBATech (Comp)Document12 pagesCourse Policy-IVP July 2022-BTech-MBATech (Comp)Darsh ThakkarNo ratings yet
- RWRFDocument8 pagesRWRFVeena Divya KrishnappaNo ratings yet
- Feature Extraction Using GLCM (Mamography)Document3 pagesFeature Extraction Using GLCM (Mamography)him1234567890No ratings yet
- DSP 1st Exam SolutionsDocument5 pagesDSP 1st Exam Solutionsعمار طعمةNo ratings yet
- Yamaha MG06X/MG06 - Owner's ManualDocument2 pagesYamaha MG06X/MG06 - Owner's Manualrinconvega50% (2)
- Analog Communication Lecture Notes: Department of Electronics and Communications Microwave-I Notes By-Girraj SharmaDocument142 pagesAnalog Communication Lecture Notes: Department of Electronics and Communications Microwave-I Notes By-Girraj SharmaER_GIRRAJNo ratings yet
- Topic 5:: Multirate Digital Signal ProcessingDocument27 pagesTopic 5:: Multirate Digital Signal ProcessingPhạm Văn BiênNo ratings yet
- TDA8943SF: 1. General DescriptionDocument20 pagesTDA8943SF: 1. General Descriptionpucuk pinusNo ratings yet
- 50 Years of FFT Algorithms and Applications.Document34 pages50 Years of FFT Algorithms and Applications.Alvaro CotaquispeNo ratings yet
- Zero Padding of SignalsDocument5 pagesZero Padding of Signals1balamanianNo ratings yet
- DSO Digital Storage Oscilloscope: ApplicationDocument2 pagesDSO Digital Storage Oscilloscope: ApplicationmsequipmentsNo ratings yet
- MEVD-104 DIGITAL SIGNAL PROCESSING RGPV Dec-2011Document2 pagesMEVD-104 DIGITAL SIGNAL PROCESSING RGPV Dec-2011Prakash SinhaNo ratings yet