Download as pdf or txt
You might also like
- PC235W13 Assignment5 SolutionsDocument10 pagesPC235W13 Assignment5 SolutionskwokNo ratings yet
- V&N 354 LectureLesing6Document7 pagesV&N 354 LectureLesing6YemukelaniNo ratings yet
- AERO 4630: Structural Dynamics Homework 5: 1 Problem 1: Viscously Damped PendulumDocument5 pagesAERO 4630: Structural Dynamics Homework 5: 1 Problem 1: Viscously Damped PendulumMD GOLAM SARWARNo ratings yet
- Single Degree of Freedom (SDOF) System: M U + Ku F (T) Equation of MotionDocument5 pagesSingle Degree of Freedom (SDOF) System: M U + Ku F (T) Equation of MotionMS schNo ratings yet
- V&N 354 LectureLesing5Document7 pagesV&N 354 LectureLesing5YemukelaniNo ratings yet
- Home Work: Classical Mechanics: 21 June 2012Document8 pagesHome Work: Classical Mechanics: 21 June 2012Teeranun NakyaiNo ratings yet
- DYnamics of Structure PDFDocument34 pagesDYnamics of Structure PDFSayam Sai Dhanush na19b103No ratings yet
- MATH 219: Spring 2021-22Document14 pagesMATH 219: Spring 2021-22HesapNo ratings yet
- Tutorial 2Document3 pagesTutorial 2fastman94No ratings yet
- Lecture 3Document5 pagesLecture 3nakulNo ratings yet
- 1st Order Polarizability-1Document5 pages1st Order Polarizability-1bumba_90No ratings yet
- MATH 057 Fourier: Johnson Liu 24 February 2019Document5 pagesMATH 057 Fourier: Johnson Liu 24 February 2019Johnson LiuNo ratings yet
- Propagation of Regularity and Global Hypoellipticity: A.Alexandrouhimonas&GersonpetronilhoDocument11 pagesPropagation of Regularity and Global Hypoellipticity: A.Alexandrouhimonas&GersonpetronilhonicolaszNo ratings yet
- Two Dof State Space RevDDocument15 pagesTwo Dof State Space RevDDeosharan RoyNo ratings yet
- Homework 10Document5 pagesHomework 10Khalil UllahNo ratings yet
- 88 Seco 29) Operational Mathematics: Ir The Initial Conditions Are Xo, X' (O) VoDocument4 pages88 Seco 29) Operational Mathematics: Ir The Initial Conditions Are Xo, X' (O) VoMariana hernandezNo ratings yet
- Homotopy Perturbation Method For Time-FractionalDocument10 pagesHomotopy Perturbation Method For Time-Fractionalsingh_mathitbhu5790No ratings yet
- 02 - Dynamics2StatiscDocument24 pages02 - Dynamics2StatiscJonathan MarioNo ratings yet
- Lecture 2 and 3 - Earthquake Engineering, 10 and 11 June H. 10.30Document27 pagesLecture 2 and 3 - Earthquake Engineering, 10 and 11 June H. 10.30JOY MOFORNo ratings yet
- MA1512 Tutorial 5 SolutionsDocument7 pagesMA1512 Tutorial 5 SolutionsWeiyen NgNo ratings yet
- Dwnload Full Introduction To Communication Systems 1st Edition Madhow Solutions Manual PDFDocument36 pagesDwnload Full Introduction To Communication Systems 1st Edition Madhow Solutions Manual PDFlisadavispaezjwkcbg100% (12)
- Picards TheoremDocument4 pagesPicards TheoremRapaza FotolicaNo ratings yet
- Parabolic FDMDocument9 pagesParabolic FDMDevender JainNo ratings yet
- Introduction To Communication Systems 1st Edition Madhow Solutions ManualDocument18 pagesIntroduction To Communication Systems 1st Edition Madhow Solutions Manualbradleygillespieditcebswrf100% (15)
- Werner, Raab - The Truth of Riemann HypothesisDocument11 pagesWerner, Raab - The Truth of Riemann HypothesisJulie KalpoNo ratings yet
- Lab Work 5: Heat EquationDocument3 pagesLab Work 5: Heat EquationAsma ZerroukiNo ratings yet
- Complex Pendulums and Lissajous FiguresDocument24 pagesComplex Pendulums and Lissajous FiguresSatyam PanchalNo ratings yet
- Finansmatte FSDocument1 pageFinansmatte FSGustav HägglundNo ratings yet
- CSE40418-Week 2Document33 pagesCSE40418-Week 2smithson JoeNo ratings yet
- Am 53Document11 pagesAm 53Mikael Yuan EstuariwinarnoNo ratings yet
- Single Degree of FreedomDocument29 pagesSingle Degree of Freedommm0493440No ratings yet
- Lecture 3 Fourier SeriesDocument10 pagesLecture 3 Fourier SeriesShannon DayNo ratings yet
- hw3 2024Document3 pageshw3 2024Hassan AliNo ratings yet
- Influence of Base or Support Motion On A Mass Attached To ItDocument4 pagesInfluence of Base or Support Motion On A Mass Attached To ItAngNo ratings yet
- Review of Sdof Concepts: CEE490bDocument7 pagesReview of Sdof Concepts: CEE490bpedro sNo ratings yet
- V&N 354 - LectureLesing1Document4 pagesV&N 354 - LectureLesing1YemukelaniNo ratings yet
- 03 ASA FEM Dynamics Two DOFs ExampleDocument6 pages03 ASA FEM Dynamics Two DOFs ExampleBerk CinarNo ratings yet
- Solution # 2: Department of Physics IIT Kanpur, Semester II, 2022-23Document4 pagesSolution # 2: Department of Physics IIT Kanpur, Semester II, 2022-23darshan sethiaNo ratings yet
- ECE216H1 2022 SolutionDocument4 pagesECE216H1 2022 SolutionhcxNo ratings yet
- Lecture 01 Wave Eq TheoryDocument12 pagesLecture 01 Wave Eq TheoryVladimir JovanovicNo ratings yet
- Assignment 1-SolutionsDocument5 pagesAssignment 1-SolutionsKaveendra KumarNo ratings yet
- 4 Relevant CoursenotesDocument14 pages4 Relevant CoursenotesRida ahmedNo ratings yet
- Solutions 3Document7 pagesSolutions 3Max JenkinsonNo ratings yet
- P (T) P Sin T : Harmonic Vibration of Undamped SystemDocument27 pagesP (T) P Sin T : Harmonic Vibration of Undamped SystemJOY MOFORNo ratings yet
- Forced Harmonic OscDocument6 pagesForced Harmonic OscHZ. TYMOFEINo ratings yet
- Chapter 8. Other Cool Stuff: DB B K N N MDocument12 pagesChapter 8. Other Cool Stuff: DB B K N N Msakeriraq81No ratings yet
- Class 29th JanDocument24 pagesClass 29th JanmileknzNo ratings yet
- Solns ch2Document17 pagesSolns ch2Soumitra BhowmickNo ratings yet
- PDB 22Document7 pagesPDB 22dwiyuliani59No ratings yet
- OscillationDocument33 pagesOscillationchinmoy duttaNo ratings yet
- The Time Evolution Operator As A Time-Ordered ExponentialDocument8 pagesThe Time Evolution Operator As A Time-Ordered ExponentialMonky PandaNo ratings yet
- FALLSEM2023-24 BECE202L TH VL2023240102253 2023-10-12 Reference-Material-IDocument5 pagesFALLSEM2023-24 BECE202L TH VL2023240102253 2023-10-12 Reference-Material-Is.sreeram135No ratings yet
- A Comparison Between Active and Passive Vibration Control of Non-Linear Simple Pendulum PDFDocument12 pagesA Comparison Between Active and Passive Vibration Control of Non-Linear Simple Pendulum PDFmohamed mourad LafifiNo ratings yet
- Wave PDFDocument10 pagesWave PDFAswin RangkutiNo ratings yet
- Notes LT2Document20 pagesNotes LT2Zaw Phyo OoNo ratings yet
- Essential Questions For The Exam 2017, AMCS 336, Numerical Methods For Stochastic Differential EquationsDocument21 pagesEssential Questions For The Exam 2017, AMCS 336, Numerical Methods For Stochastic Differential EquationsAgustín EstramilNo ratings yet
- Review of Sdof ConceptsDocument7 pagesReview of Sdof ConceptskalpanaadhiNo ratings yet
- Tables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesFrom EverandTables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesNo ratings yet
- Beams With Corrugated Web at Elevated Temperature Exp 2016 Thin Walled StruDocument10 pagesBeams With Corrugated Web at Elevated Temperature Exp 2016 Thin Walled StrunakulNo ratings yet
- Inverse Neural Network2Document1 pageInverse Neural Network2nakulNo ratings yet
- Lecture 5Document3 pagesLecture 5nakulNo ratings yet
- Lecture 3Document5 pagesLecture 3nakulNo ratings yet
- Logarithmic DecrementDocument2 pagesLogarithmic DecrementnakulNo ratings yet
- Mechanics Civil BOOSTERDocument20 pagesMechanics Civil BOOSTERnakulNo ratings yet
- Chapter 6 NormalDocument25 pagesChapter 6 NormalShivani PriyaNo ratings yet
- UMTS OSS KPI MonitorDocument2 pagesUMTS OSS KPI MonitorTeam MSNo ratings yet
- Assignments: Maths 2DDocument5 pagesAssignments: Maths 2DHANSNo ratings yet
- GATE BY RK Kanodia Signals and SystemsDocument41 pagesGATE BY RK Kanodia Signals and SystemsPratesh Kumar Reddy67% (3)
- Chapter - 7: Sampling Distribution: Calculation of Point EstimatorsDocument2 pagesChapter - 7: Sampling Distribution: Calculation of Point EstimatorsNitish Nair0% (1)
- Geometry in Real LifeDocument48 pagesGeometry in Real LifeNishita Sindhu100% (1)
- Design Assessment of Pin Fin Heat Exchanger and ImprovementsDocument14 pagesDesign Assessment of Pin Fin Heat Exchanger and ImprovementsAyeshaNo ratings yet
- Smart PointersDocument6 pagesSmart Pointersrupeshk_pNo ratings yet
- GerbView Reference ManualDocument23 pagesGerbView Reference ManualAlexandrNo ratings yet
- Science Technology and Society: 1. What Are The Developments of Science and Technology in The Egyptian and Babylonians?Document2 pagesScience Technology and Society: 1. What Are The Developments of Science and Technology in The Egyptian and Babylonians?Reiah RongavillaNo ratings yet
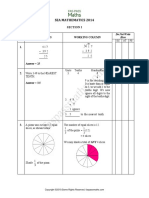
- Sea Mathematics 2014: No. Test Items Working ColumnDocument33 pagesSea Mathematics 2014: No. Test Items Working ColumnIndira ButkoonNo ratings yet
- Geometric Construction of Four-Dimensional Rotations Part I. Case of Four-Dimensional Euclidean SpaceDocument12 pagesGeometric Construction of Four-Dimensional Rotations Part I. Case of Four-Dimensional Euclidean SpaceShinya MinatoNo ratings yet
- Understanding Mathematics in The Digital AgeDocument30 pagesUnderstanding Mathematics in The Digital Ageuser0xNo ratings yet
- Early Numerical Abilities and Cognitive Skillsin Kindergarten ChildrenDocument18 pagesEarly Numerical Abilities and Cognitive Skillsin Kindergarten ChildrenNu AripinNo ratings yet
- Construction Economics 1: Assoc. Prof. Dr. Mohd Hanizun HanafiDocument50 pagesConstruction Economics 1: Assoc. Prof. Dr. Mohd Hanizun HanafivnskwcNo ratings yet
- Aqa 43651H QP Nov14 PDFDocument24 pagesAqa 43651H QP Nov14 PDFwill bNo ratings yet
- B Ce001-Ce31fa1 15-16-2Document68 pagesB Ce001-Ce31fa1 15-16-2Emmanuel LazoNo ratings yet
- Exp-No6 Multiplication of 8 Bit and 16-Bit NumbersDocument2 pagesExp-No6 Multiplication of 8 Bit and 16-Bit NumbersMohammed Dyhia Ali0% (1)
- DATE Lab Manual - UpdatedDocument65 pagesDATE Lab Manual - UpdatedMalathi KaruppannanNo ratings yet
- Gauge (Ga) Standard Steel Thickness (Inches) Galvanized Steel Thickness (Inches) Aluminum Thickness (Inches)Document8 pagesGauge (Ga) Standard Steel Thickness (Inches) Galvanized Steel Thickness (Inches) Aluminum Thickness (Inches)Elan David Sánchez MendezNo ratings yet
- Higher Maths Solutions 2003Document13 pagesHigher Maths Solutions 2003gerryoneil5312100% (2)
- Object Oriented Paradigm (Java)Document43 pagesObject Oriented Paradigm (Java)Sivaramakrishna Markandeya GuptaNo ratings yet
- CBSE Class 11 Mathematics Worksheet - ProbabilityDocument2 pagesCBSE Class 11 Mathematics Worksheet - ProbabilitymuskanNo ratings yet
- History of Scientific Concepts (Ian Hacking)Document14 pagesHistory of Scientific Concepts (Ian Hacking)racorderov100% (2)
- Pertemuan 2-3 Logics and ProofDocument37 pagesPertemuan 2-3 Logics and ProofleondyNo ratings yet
- Non Uniformity Correction Algorithm For Large Format Shortwave Infrared Imaging ArrayDocument4 pagesNon Uniformity Correction Algorithm For Large Format Shortwave Infrared Imaging ArrayEditor IJRITCCNo ratings yet
- Treinamento - SheetmetalDocument79 pagesTreinamento - SheetmetalMarlosFerreiraNo ratings yet
- SUN Technologies - Java SCJPDocument226 pagesSUN Technologies - Java SCJPImane El HassaniNo ratings yet
- Lesson Plan in MathDocument4 pagesLesson Plan in MathJobellyn CatipanNo ratings yet
- Mouse Dynamics Based User Recognition Using Deep LDocument12 pagesMouse Dynamics Based User Recognition Using Deep LSilveryu MathosNo ratings yet