Download as pdf or txt
You might also like
- Op Herma 500 V110280219 UsDocument120 pagesOp Herma 500 V110280219 UsJames Coffey100% (3)
- Lab 4.1 Installing Certificate Services: Tạo 1 VM mới, đặt tên là Windows Server, phiên bản Windows 2016Document91 pagesLab 4.1 Installing Certificate Services: Tạo 1 VM mới, đặt tên là Windows Server, phiên bản Windows 20161liedkidNo ratings yet
- Advantages and Disadvantages of Microsoft AccessDocument5 pagesAdvantages and Disadvantages of Microsoft AccessMohd ZulfadzleyNo ratings yet
- Introduction To Real-Time Control Using Labview With An Application To Distance LearningDocument18 pagesIntroduction To Real-Time Control Using Labview With An Application To Distance LearningMarlon José Do CarmoNo ratings yet
- Virtual Instrumentation For Visualization of Vibration and Its ControlDocument5 pagesVirtual Instrumentation For Visualization of Vibration and Its ControltripathijohnNo ratings yet
- A New and Open Model To Share Laboratories On The InternetDocument7 pagesA New and Open Model To Share Laboratories On The InternetrusbelNo ratings yet
- A Novel Web-Based Laboratory For Remote Control of Power Lighting ProcessesDocument13 pagesA Novel Web-Based Laboratory For Remote Control of Power Lighting Processessigha josueNo ratings yet
- Experimental Platforms Based Labview For Teaching Electronics Engineering CoursesDocument8 pagesExperimental Platforms Based Labview For Teaching Electronics Engineering CoursesTanNguyễnNo ratings yet
- Send Re Scu 2013Document6 pagesSend Re Scu 2013Fernando TriNo ratings yet
- Lab ManualDocument4 pagesLab ManualAnonymous FKMfvCbNo ratings yet
- Virtual Lab Versus Remote Lab: Michael E. AuerDocument9 pagesVirtual Lab Versus Remote Lab: Michael E. AuerrmspNo ratings yet
- Energy-Aware Distributed Simulation For Mobile Platforms: An Empirical StudyDocument21 pagesEnergy-Aware Distributed Simulation For Mobile Platforms: An Empirical StudyFahad MaqboolNo ratings yet
- 416 Article 2251 1 10 20220331Document12 pages416 Article 2251 1 10 20220331James VõNo ratings yet
- Computer Laboratory Management With Mobile Application (Clmma)Document6 pagesComputer Laboratory Management With Mobile Application (Clmma)Rawbema MarzNo ratings yet
- Computer Laboratory Management With Mobile Application (Clmma)Document6 pagesComputer Laboratory Management With Mobile Application (Clmma)moges tesfayeNo ratings yet
- Design of A Low-Cost Air Levitation System For Teaching Control EngineeringDocument18 pagesDesign of A Low-Cost Air Levitation System For Teaching Control EngineeringHernán LaraNo ratings yet
- A LabVIEW-Based Remote LabDocument14 pagesA LabVIEW-Based Remote Labsonsivri sonNo ratings yet
- Hybrid Remote Laboratory For Testing NewDocument5 pagesHybrid Remote Laboratory For Testing NewsutranNo ratings yet
- Journal of Building EngineeringDocument16 pagesJournal of Building EngineeringThanh HùngNo ratings yet
- Demkit: A Flexible Smart Grid Simulation and Demonstration Platform Written in PythonDocument2 pagesDemkit: A Flexible Smart Grid Simulation and Demonstration Platform Written in PythonMinhNo ratings yet
- Towards Virtual Laboratories: A Survey of Labview-Based Teaching/ Learning Tools and Future TrendsDocument10 pagesTowards Virtual Laboratories: A Survey of Labview-Based Teaching/ Learning Tools and Future TrendsBoubker BellahnaNo ratings yet
- Computers & Chemical Engineering: Jae Hak Jung A,, Moonyong Lee A, Jietae Lee B, Chonghun Han CDocument6 pagesComputers & Chemical Engineering: Jae Hak Jung A,, Moonyong Lee A, Jietae Lee B, Chonghun Han Cahmed ubeedNo ratings yet
- Developing Networked Control Labs: A Matlab and Easy Java Simulations ApproachDocument10 pagesDeveloping Networked Control Labs: A Matlab and Easy Java Simulations ApproachChetan MathapatiNo ratings yet
- 2018 (28) A Low-Cost Feedback Control Systems Laboratory Setup Via Arduino-Simulink Interface - 2018Document9 pages2018 (28) A Low-Cost Feedback Control Systems Laboratory Setup Via Arduino-Simulink Interface - 2018Ricardo AfonsoNo ratings yet
- Practical Control Loop Tuning Using A Matlab/Simulink ToolboxDocument5 pagesPractical Control Loop Tuning Using A Matlab/Simulink Toolboxmo_waqNo ratings yet
- Teaching Mechatronics Using SCADADocument4 pagesTeaching Mechatronics Using SCADAFrancisco SuárezNo ratings yet
- Raspberry Pi Sebagai Pemantau Ruang Laboratorium Menggunakan Metode Perekaman Terjadwal Berbasis DatabaseDocument4 pagesRaspberry Pi Sebagai Pemantau Ruang Laboratorium Menggunakan Metode Perekaman Terjadwal Berbasis DatabasePolitik Itu KejamNo ratings yet
- Monitoring and Controlling Virtual and Hybrid Test Benches in The CloudDocument6 pagesMonitoring and Controlling Virtual and Hybrid Test Benches in The CloudLars StockmannNo ratings yet
- Opc 1 PDFDocument7 pagesOpc 1 PDFMichael Adu-boahenNo ratings yet
- A Modular Simulink-Based Controlled Three-Phase Switch Mode InverterDocument7 pagesA Modular Simulink-Based Controlled Three-Phase Switch Mode InverterLee EzzitouniNo ratings yet
- A Microcontroller Implementation of Constrained Model Predictive ControlDocument8 pagesA Microcontroller Implementation of Constrained Model Predictive Controlmohamed mourad LafifiNo ratings yet
- International Journal of Industrial Ergonomics: Chiuhsiang Joe Lin, Tsung-Ling Hsieh, Chih-Wei Yang, Ren-Jie HuangDocument9 pagesInternational Journal of Industrial Ergonomics: Chiuhsiang Joe Lin, Tsung-Ling Hsieh, Chih-Wei Yang, Ren-Jie HuangabelNo ratings yet
- An Industrial Automation Course: Common Infrastructure For Physical, Virtual and Remote Laboratories For PLC ProgrammingDocument16 pagesAn Industrial Automation Course: Common Infrastructure For Physical, Virtual and Remote Laboratories For PLC ProgrammingdimaNo ratings yet
- Experiential Learning of Digital CommuniDocument8 pagesExperiential Learning of Digital Communisangeetha vishwaprabhuNo ratings yet
- Webist 2007 FinalDocument7 pagesWebist 2007 Finalcapacitor64No ratings yet
- CASE STUDY SahanaDocument8 pagesCASE STUDY SahanaVishnu .SNo ratings yet
- Computer-Based Learning For Electromechanical Systems, Model 8980: A Modern-Day Teaching Tool For Effective Instruction in Electric Power TechnologyDocument2 pagesComputer-Based Learning For Electromechanical Systems, Model 8980: A Modern-Day Teaching Tool For Effective Instruction in Electric Power TechnologyGregorio V GuzmánNo ratings yet
- A Fully Open Source Remote Laboratory For Practical LearningDocument16 pagesA Fully Open Source Remote Laboratory For Practical LearningcratmanNo ratings yet
- Uso de Tecnicas de Virtualizacion para Mejorar LaDocument9 pagesUso de Tecnicas de Virtualizacion para Mejorar LaManiiySosaNo ratings yet
- Development of A Real-Time Digital Control System With A Hardware-in-the-Loop Magnetic Levitation Device For Reinforcement of Controls EducationDocument9 pagesDevelopment of A Real-Time Digital Control System With A Hardware-in-the-Loop Magnetic Levitation Device For Reinforcement of Controls EducationJacobo Javier Cáceres RodríguezNo ratings yet
- Effective Use of Virtualization in ComputerDocument4 pagesEffective Use of Virtualization in Computerkarina nilasariNo ratings yet
- Experimenting Through The Web A Linear Variable Differential TransformerDocument7 pagesExperimenting Through The Web A Linear Variable Differential Transformerkhalil alhatabNo ratings yet
- A High Availability Solution For GRID ServicesDocument16 pagesA High Availability Solution For GRID ServicesMohamed SAADAOUINo ratings yet
- Pdes 2022Document6 pagesPdes 2022mirceaNo ratings yet
- IJEAS0301011Document6 pagesIJEAS0301011erpublicationNo ratings yet
- Process Control Trainer Project Report - Original1Document42 pagesProcess Control Trainer Project Report - Original1Augustine paulNo ratings yet
- DCSDocument14 pagesDCSkemmazamcfcaNo ratings yet
- Sliding Mode Control of A Servo System in LabVIEWDocument10 pagesSliding Mode Control of A Servo System in LabVIEWSaleem RiazNo ratings yet
- Unknown - Unknown - Advanced - Tools - Control - Industry - 4.0Document6 pagesUnknown - Unknown - Advanced - Tools - Control - Industry - 4.0gesmarjuniorNo ratings yet
- A Virtual Laboratory For Distance Education: Virtual Control Lab ArchitectureDocument4 pagesA Virtual Laboratory For Distance Education: Virtual Control Lab ArchitectureMusawwir UsmanNo ratings yet
- Remote Laboratories Over Different Platforms and Application Fields: A SurveyDocument7 pagesRemote Laboratories Over Different Platforms and Application Fields: A SurveyLahoussine ElmahniNo ratings yet
- PLC2Document8 pagesPLC2William BrownNo ratings yet
- 15 Teaching Advanced Concepts in Computer Networks VNUML UM Virtualization ToolDocument12 pages15 Teaching Advanced Concepts in Computer Networks VNUML UM Virtualization ToolSyafira MardhiyahNo ratings yet
- TarjomeFa F1004 EnglishDocument9 pagesTarjomeFa F1004 EnglishMohsen GolmohammadiNo ratings yet
- MechatronicsDocument9 pagesMechatronicsAlejandro MisesNo ratings yet
- Dietrich Beck and Holger Brand, DVEE, GSI 1Document1 pageDietrich Beck and Holger Brand, DVEE, GSI 1itrialNo ratings yet
- Application of The User-Centred DesignDocument8 pagesApplication of The User-Centred DesignAlvaro Jose Ozuna MartinezNo ratings yet
- 1 s2.0 S2212827116303055 MainDocument6 pages1 s2.0 S2212827116303055 MainTâm Trương ThànhNo ratings yet
- Autonomic Computing For Spacecraft Ground Systems: Zhenping Li, Cetin SavkliDocument8 pagesAutonomic Computing For Spacecraft Ground Systems: Zhenping Li, Cetin SavkliUppi VajralaNo ratings yet
- 10 11648 J Ajrs 20170505 11Document9 pages10 11648 J Ajrs 20170505 11sweet boy play boyNo ratings yet
- Ieee 2014 Project List by Spectrum Solutions PondicherryDocument159 pagesIeee 2014 Project List by Spectrum Solutions PondicherryRaushan Kumar SinghNo ratings yet
- Online Training of An Opto-Electronic Reservoir Computer Applied To Real-Time Channel EqualizationDocument14 pagesOnline Training of An Opto-Electronic Reservoir Computer Applied To Real-Time Channel EqualizationGeraud Russel Goune ChenguiNo ratings yet
- Full Vehicle Simulation For Electrification and Automated Driving ApplicationsDocument41 pagesFull Vehicle Simulation For Electrification and Automated Driving ApplicationsraghavNo ratings yet
- Vehicle SimulatorDocument12 pagesVehicle SimulatorraghavNo ratings yet
- BMS SessionDocument5 pagesBMS SessionraghavNo ratings yet
- Interview-level-QA-on-C LanguageDocument41 pagesInterview-level-QA-on-C LanguageraghavNo ratings yet
- 3d AnimationDocument4 pages3d AnimationraghavNo ratings yet
- Traffic Load Computation Using Matlab Simulink Model Blockset1Document6 pagesTraffic Load Computation Using Matlab Simulink Model Blockset1raghavNo ratings yet
- Electronic Control Unit - A Simple Introduction (2022) - AUTOTECHDRIVEDocument16 pagesElectronic Control Unit - A Simple Introduction (2022) - AUTOTECHDRIVEraghavNo ratings yet
- Edge DetectionDocument97 pagesEdge DetectionraghavNo ratings yet
- Stegngrphy JournlDocument11 pagesStegngrphy JournlraghavNo ratings yet
- 1 Introduction To Real-Time ControlDocument8 pages1 Introduction To Real-Time ControlraghavNo ratings yet
- VendingmachineDocument12 pagesVendingmachineraghavNo ratings yet
- If X (N) (1,1,1,1,1,1) Then Number of Samples N ? 10)Document1 pageIf X (N) (1,1,1,1,1,1) Then Number of Samples N ? 10)raghavNo ratings yet
- PTSP MidDocument1 pagePTSP MidraghavNo ratings yet
- PVKKIT (3N) :: IV B.Tech II Sem - I Mid:: ECE:: Sub - ADSP Set-3Document2 pagesPVKKIT (3N) :: IV B.Tech II Sem - I Mid:: ECE:: Sub - ADSP Set-3raghavNo ratings yet
- Basic Simulation RaghavDocument21 pagesBasic Simulation RaghavraghavNo ratings yet
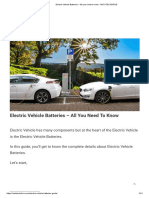
- Electric Vehicle Batteries - All You Need To Know - AUTOTECHDRIVEDocument14 pagesElectric Vehicle Batteries - All You Need To Know - AUTOTECHDRIVEraghavNo ratings yet
- A Novel Design and Analysis of 4: 2 Compressors With Reduced Area Delay and PowerDocument15 pagesA Novel Design and Analysis of 4: 2 Compressors With Reduced Area Delay and PowerraghavNo ratings yet
- High Performance MultiplyDocument11 pagesHigh Performance MultiplyraghavNo ratings yet
- Bits PTSPDocument2 pagesBits PTSPraghavNo ratings yet
- Bits PTSPDocument2 pagesBits PTSPraghavNo ratings yet
- Emtl Assignment-2Document1 pageEmtl Assignment-2raghavNo ratings yet
- Food Delivery AND Temperature Detecting Robot Using Esp8266: Pavan BallaDocument11 pagesFood Delivery AND Temperature Detecting Robot Using Esp8266: Pavan BallaraghavNo ratings yet
- Matlab Programming Mid-2 ObjectiveDocument1 pageMatlab Programming Mid-2 ObjectiveraghavNo ratings yet
- Intensity Images: Double Uint8 Double Uint8 Uint8Document54 pagesIntensity Images: Double Uint8 Double Uint8 Uint8raghavNo ratings yet
- ANUSHADocument20 pagesANUSHAraghavNo ratings yet
- Unbiased Rounding For HUB Floating-Point Addition: Julio Villalba, Javier Hormigo and Sonia Gonz Alez-NavarroDocument8 pagesUnbiased Rounding For HUB Floating-Point Addition: Julio Villalba, Javier Hormigo and Sonia Gonz Alez-NavarroraghavNo ratings yet
- Approximate Hybrid High Radix Encoding For Energy-Efficient Inexact MultipliersDocument10 pagesApproximate Hybrid High Radix Encoding For Energy-Efficient Inexact MultipliersraghavNo ratings yet
- Impact of Information and Communication TechnologyDocument42 pagesImpact of Information and Communication TechnologyAiresheale VillancioNo ratings yet
- ICSE Semester 2 Specimen - 861 CTA1Document4 pagesICSE Semester 2 Specimen - 861 CTA1Constantine ByzantineNo ratings yet
- Pointers Assignment: Example 1Document4 pagesPointers Assignment: Example 1Muhammad BilalNo ratings yet
- MipsrefDocument1 pageMipsreflindsay liuNo ratings yet
- Parallel ComputingDocument18 pagesParallel Computingayushigaur001100% (1)
- Red Hat Enterprise Linux-8-System Design Guide-En-usDocument1,097 pagesRed Hat Enterprise Linux-8-System Design Guide-En-usovldgjjbakxumwcgpkNo ratings yet
- swx2 20210728 PDFDocument142 pagesswx2 20210728 PDFServicekamuiKamuiNo ratings yet
- Lightspeed Manual 2021Document118 pagesLightspeed Manual 2021finetradeNo ratings yet
- Service Recipes - FidesmoDocument1 pageService Recipes - FidesmoaafentNo ratings yet
- Interview QuestionDocument3 pagesInterview Questionkanon chakmaNo ratings yet
- Physioplux Manual 2.2.4 PrintDocument49 pagesPhysioplux Manual 2.2.4 PrintNuno RodolfoNo ratings yet
- Asoc: Supporting Audio On An Embedded Board: Free ElectronsDocument37 pagesAsoc: Supporting Audio On An Embedded Board: Free ElectronsVaibhav DhinganiNo ratings yet
- Coronel PPT Ch03Document38 pagesCoronel PPT Ch03Aida GdNo ratings yet
- Incident ManagementDocument12 pagesIncident ManagementManas Ranjan SahooNo ratings yet
- DEF CON Safe Mode - Blockchain Village - Peiyu Wang - Exploit Insecure Crypto WalletDocument60 pagesDEF CON Safe Mode - Blockchain Village - Peiyu Wang - Exploit Insecure Crypto WalletMitchNo ratings yet
- Toolbox Log SnapshotDocument14 pagesToolbox Log SnapshotnovatinopNo ratings yet
- Networking With MikrotikDocument175 pagesNetworking With MikrotikRolland MukeNo ratings yet
- Retronyms Labs OverviewDocument15 pagesRetronyms Labs OverviewJohn-Paul WaltonNo ratings yet
- Alarm and Monitoring System Wärtsilä SAM Electronics MCS Platinum Training Vigo 26.09.2018Document2 pagesAlarm and Monitoring System Wärtsilä SAM Electronics MCS Platinum Training Vigo 26.09.2018Abdul MuksithNo ratings yet
- Red Hat Certified Specialist in Openshift Administration ExamDocument3 pagesRed Hat Certified Specialist in Openshift Administration ExamR VNo ratings yet
- ML Observability Build Vs Buy Download Guide 1689038317Document31 pagesML Observability Build Vs Buy Download Guide 1689038317rastrol7No ratings yet
- Data Base Managment SystemDocument14 pagesData Base Managment Systempratham PandeyNo ratings yet
- Aditya Prakash: GeekyantsDocument1 pageAditya Prakash: GeekyantsJemima JemiNo ratings yet
- 03 Advanced Mobile Programming Using FlutterDocument64 pages03 Advanced Mobile Programming Using FlutterDANIEL ABERANo ratings yet
- Data Manipulation Language 5Document9 pagesData Manipulation Language 5Adbulwehab SeidNo ratings yet
- MS Excel Skills - Exercises - TAPMIDocument730 pagesMS Excel Skills - Exercises - TAPMIAnanya GuptaNo ratings yet
- Digital Technology: by Keji GiwaDocument36 pagesDigital Technology: by Keji GiwalunndigitalconsultingltdNo ratings yet