Download as pdf or txt
You might also like
- User's Manual BOOK I PDFDocument109 pagesUser's Manual BOOK I PDFJulio Rodriguez100% (1)
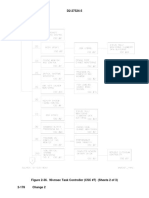
- Minuteman LCC Pages From Select Manual 266 530Document265 pagesMinuteman LCC Pages From Select Manual 266 530maruka33No ratings yet
- MEP Vol. 1.9 Steering GearDocument40 pagesMEP Vol. 1.9 Steering Gearqwerty100% (1)
- Short Range UavDocument40 pagesShort Range UavthiyagusaraNo ratings yet
- Aerospace Avionics System - NavigationDocument475 pagesAerospace Avionics System - NavigationMadheshvaran Loganathan100% (2)
- Mechanical SystemDocument4 pagesMechanical Systembeaburga5No ratings yet
- 6.1 Turbo Propeller and Turbo Jet Engine - IiDocument14 pages6.1 Turbo Propeller and Turbo Jet Engine - IiArchNo ratings yet
- Design of A Robust Quadcopter Controller For Stable LandingDocument13 pagesDesign of A Robust Quadcopter Controller For Stable LandingChanuka WickramasingheNo ratings yet
- MIT ThesisDocument114 pagesMIT ThesisAlexandre Alves SantiagoNo ratings yet
- Reference PaperDocument6 pagesReference PaperDr E SAKTHIVEL SNo ratings yet
- Recent Developments in Ship Control System DesignDocument4 pagesRecent Developments in Ship Control System DesignManoj KumarNo ratings yet
- Cable Ship OverviewDocument30 pagesCable Ship Overviewkaushaltrivedi46No ratings yet
- 08.4 Building Utilities - Mechanical Systems 11-10-2021Document5 pages08.4 Building Utilities - Mechanical Systems 11-10-2021Clarissa AricaNo ratings yet
- Research Collection: PID Vs LQ Control Techniques Applied To An Indoor Micro QuadrotorDocument7 pagesResearch Collection: PID Vs LQ Control Techniques Applied To An Indoor Micro QuadrotorEnes Muhammed TürkmenNo ratings yet
- Lecture-01 IntroductionDocument35 pagesLecture-01 Introductionvasu sainNo ratings yet
- Pu BL Ications: Practical Aspects of Ride Control Systems For MGH Speed Ferries Ajan J HaywoodDocument7 pagesPu BL Ications: Practical Aspects of Ride Control Systems For MGH Speed Ferries Ajan J HaywoodsirousNo ratings yet
- Uadcopter Drone: (Electrical 6Th Sem.)Document51 pagesUadcopter Drone: (Electrical 6Th Sem.)Abhay GuptaNo ratings yet
- AUV Design Intelligent Vehicle Using Sensor Fusion Control SchemeDocument4 pagesAUV Design Intelligent Vehicle Using Sensor Fusion Control SchemeSachin SharmaNo ratings yet
- Antares Spacecraft EnglishDocument15 pagesAntares Spacecraft EnglishdosfoxNo ratings yet
- REMO Project: Design, Modelling and Hydrodynamic Simulation of A Robot of Variable Geometry For Actuations On Maritime DisastersDocument17 pagesREMO Project: Design, Modelling and Hydrodynamic Simulation of A Robot of Variable Geometry For Actuations On Maritime Disastersgabiremero100% (2)
- 08.4 Building Utilities Mechanical Systems 11 10 2021Document5 pages08.4 Building Utilities Mechanical Systems 11 10 2021Divina Luiza FantonialNo ratings yet
- FW L3b ControlAndSolarUAS 2015Document28 pagesFW L3b ControlAndSolarUAS 2015Prakash ChouhanNo ratings yet
- An Introduction To Deploy Able Recovery SystemsDocument33 pagesAn Introduction To Deploy Able Recovery SystemsFlorin NiteNo ratings yet
- Neuro-Fuzzy System To Control The Fast Ferry Vertical AccelerationDocument6 pagesNeuro-Fuzzy System To Control The Fast Ferry Vertical AccelerationsirousNo ratings yet
- Group 10 FinalDocument44 pagesGroup 10 FinalYugal BirzareNo ratings yet
- Helicopter SlidesDocument133 pagesHelicopter SlidesRyan Nguyễn100% (4)
- 2013 L5 Rotorcraft - IntroductionDocument21 pages2013 L5 Rotorcraft - IntroductionMUTHUKUMAR MNo ratings yet
- Repsol-Inprocess - Reliability of Dynamic Simulation To Reproduce Plant DynamicsDocument28 pagesRepsol-Inprocess - Reliability of Dynamic Simulation To Reproduce Plant Dynamicsjjmm1969No ratings yet
- Microsoft PowerPoint - Lecture0 DSK - Introduction Rev.01.09.14Document57 pagesMicrosoft PowerPoint - Lecture0 DSK - Introduction Rev.01.09.14Syahrul RamdaniNo ratings yet
- The Effectiveness of Pole Placement Method in Control System Design For An Autonomous Helicopter Model in Hovering FlightDocument14 pagesThe Effectiveness of Pole Placement Method in Control System Design For An Autonomous Helicopter Model in Hovering FlightAnonymous 8ruAHwPaNo ratings yet
- Drone PresentationDocument31 pagesDrone PresentationMed Rabeh100% (1)
- MODULE 2 - Principles of Dynamic PositioningDocument24 pagesMODULE 2 - Principles of Dynamic Positioninggavin.vedder1980No ratings yet
- Rotor Dynamics in Design of A High Speed Cryogenic Pump For Geo Stationary Launch Vehicles PDFDocument8 pagesRotor Dynamics in Design of A High Speed Cryogenic Pump For Geo Stationary Launch Vehicles PDFMounicaRasagyaPallaNo ratings yet
- Development of A Four-Dof Laboratory Underwater Manipulator For Using in Towing TankDocument6 pagesDevelopment of A Four-Dof Laboratory Underwater Manipulator For Using in Towing TankMostafa EsmaeilianNo ratings yet
- MAHIDocument48 pagesMAHIRam Sharan PrajapatiNo ratings yet
- Advmmd: Electric Steerng SystemDocument7 pagesAdvmmd: Electric Steerng SystemElcar TíquicoNo ratings yet
- 1Document272 pages1Nobara KugisakiNo ratings yet
- Estado Del Arte AnimatronicaDocument7 pagesEstado Del Arte AnimatronicaJohn OcampoNo ratings yet
- Aerothech - Linear Motors Application Guide PDFDocument36 pagesAerothech - Linear Motors Application Guide PDFAlex Alberto Traruanca NaucoNo ratings yet
- 1.1.6 Some Problems of Secondary Surveillance Radar SystemsDocument28 pages1.1.6 Some Problems of Secondary Surveillance Radar Systemsln zNo ratings yet
- School of Mechanical EngineeringDocument17 pagesSchool of Mechanical EngineeringRohit RawaniNo ratings yet
- Control Systems: DR Yahya Zweiri Y.zweiri@kingston - Ac.ukDocument25 pagesControl Systems: DR Yahya Zweiri Y.zweiri@kingston - Ac.ukShehab Abou GamrahNo ratings yet
- Training Slides PGDDocument46 pagesTraining Slides PGDnitish bhardwajNo ratings yet
- Aerial Robotics 1Document19 pagesAerial Robotics 1Gurpreet Singh AnttalNo ratings yet
- Introduction To Control SystemDocument33 pagesIntroduction To Control Systemmarina890416No ratings yet
- The Application of Energy Dissipating Damping Devices To An Engineered Structure or MechanismDocument60 pagesThe Application of Energy Dissipating Damping Devices To An Engineered Structure or Mechanismle ingénieurNo ratings yet
- Andreu J. Farkas Manned Spacecraft Center Houston, TexasDocument38 pagesAndreu J. Farkas Manned Spacecraft Center Houston, TexasRick MendelezNo ratings yet
- MEP Vol. 1.7 Hydraulic Power TransmissionDocument56 pagesMEP Vol. 1.7 Hydraulic Power TransmissiontitanwlxNo ratings yet
- Radio Control for Model Ships, Boats and AircraftFrom EverandRadio Control for Model Ships, Boats and AircraftRating: 5 out of 5 stars5/5 (1)
- Control and Flight Test of A Tilt-Rotor Unmanned Aerial VehicleDocument12 pagesControl and Flight Test of A Tilt-Rotor Unmanned Aerial VehicleArshia MoftakharihajimirzaeiNo ratings yet
- Flight System Architecture of The Sorato LunarDocument8 pagesFlight System Architecture of The Sorato LunarYetmwork TesfayeNo ratings yet
- The Autonomous Blimp Project of LAAS/CNRS Current Status and Research ChallengesDocument11 pagesThe Autonomous Blimp Project of LAAS/CNRS Current Status and Research ChallengesTalha IbadNo ratings yet
- Ka - 32 HelicoptersDocument27 pagesKa - 32 Helicopters김덕규100% (1)
- 2 PDFDocument6 pages2 PDFRandeep RNo ratings yet
- 6 PropulsionDocument39 pages6 Propulsionchowonseo00No ratings yet
- Ifac Pu Blications: Arquitectura y Automatica Complutens (2) Automatica, Ciencias. UNED. 28040 (3) Experiencias SpainDocument6 pagesIfac Pu Blications: Arquitectura y Automatica Complutens (2) Automatica, Ciencias. UNED. 28040 (3) Experiencias SpainsirousNo ratings yet
- Quartz Pendulous Accelerometers For Navigation and Tactical Grade Systems - CompressedDocument20 pagesQuartz Pendulous Accelerometers For Navigation and Tactical Grade Systems - CompressedLê Đình TiếnNo ratings yet
- Low-Speed Aerodynamics of An Unmanned Combat Aerial VehicleDocument19 pagesLow-Speed Aerodynamics of An Unmanned Combat Aerial Vehiclesami ouahraniNo ratings yet
- Hydrodynamic Autopilot Design of An AUVDocument5 pagesHydrodynamic Autopilot Design of An AUVSuman SahaNo ratings yet
- Introduction to Electronic Analogue Computers: International Series of Monographs in Electronics and InstrumentationFrom EverandIntroduction to Electronic Analogue Computers: International Series of Monographs in Electronics and InstrumentationNo ratings yet
- Classical and Modern Control with Worked Examples: Pergamon International Library of Science, Technology, Engineering and Social Studies: International Series on Systems and Control, Volume 2From EverandClassical and Modern Control with Worked Examples: Pergamon International Library of Science, Technology, Engineering and Social Studies: International Series on Systems and Control, Volume 2No ratings yet
- Apollo On-Board ComputerDocument14 pagesApollo On-Board Computerrdawson16No ratings yet
- 6.missile DescriptionDocument31 pages6.missile DescriptionJorge Antonio Chávez MirandaNo ratings yet
- 16.070 - March 21/2003 - Jayakanth Srinivasan, Jksrini@mit - EduDocument24 pages16.070 - March 21/2003 - Jayakanth Srinivasan, Jksrini@mit - Eduvikas_2No ratings yet
- Missile GuidanceDocument59 pagesMissile GuidanceSardendu PramanikNo ratings yet
- TM 9-1425-386-10-1Document123 pagesTM 9-1425-386-10-1Ed Palmer100% (1)
- 4024708ds7 Copy of SatrackDocument35 pages4024708ds7 Copy of SatrackShobhit JainNo ratings yet
- A319-320-321 Technical Training Manual Mechanics-electronics-Avioncs Course 22 Auto-Flight-SystemDocument300 pagesA319-320-321 Technical Training Manual Mechanics-electronics-Avioncs Course 22 Auto-Flight-SystemAndrew Pretz100% (3)
- TSO-C153 IMA Hardware ElementDocument113 pagesTSO-C153 IMA Hardware ElementNasr PooyaNo ratings yet
- FM 6-11Document137 pagesFM 6-11Ed Palmer100% (2)
- Open AeroDocument16 pagesOpen AerodasdllllNo ratings yet
- Introduction To Launch Vehicle Analysis and DesignDocument1 pageIntroduction To Launch Vehicle Analysis and DesignPradeep KumarNo ratings yet
- Linked Local Navigation For Visual Route GuidanceDocument2 pagesLinked Local Navigation For Visual Route GuidanceFebian PutraNo ratings yet
- Accident Causes-Fishbone DiagramDocument37 pagesAccident Causes-Fishbone DiagramNorainah Abdul GaniNo ratings yet
- Simple Adaptive Re-Entry Guidance For Path-Constraint TrackingDocument23 pagesSimple Adaptive Re-Entry Guidance For Path-Constraint TrackingDavid BermejoNo ratings yet
- Principles of Guidance, Navigation and Control of UavsDocument30 pagesPrinciples of Guidance, Navigation and Control of Uavspervaiz KhalidNo ratings yet
- Kalman FilteringDocument70 pagesKalman FilteringlalusebanNo ratings yet
- Leica J2drillAUv1.01singleDocument4 pagesLeica J2drillAUv1.01singleW N Nan FajarNo ratings yet
- AIAADocument15 pagesAIAAsarah86304325No ratings yet
- Some Funny Things Happened On The Way To The MoonDocument7 pagesSome Funny Things Happened On The Way To The MoonDelena MalanNo ratings yet
- Laser Guided MissileDocument10 pagesLaser Guided Missileashutosh1011No ratings yet
- Aplicationes Gyroscopes AGARDR58271Document28 pagesAplicationes Gyroscopes AGARDR58271Juan Vega100% (1)
- Delta 2 Payload GuideDocument256 pagesDelta 2 Payload GuidekgrhoadsNo ratings yet
- Guidance, Navigation, and Control Technology Assessment For Future Planetary Science MissionsDocument54 pagesGuidance, Navigation, and Control Technology Assessment For Future Planetary Science MissionsNuno MonteiroNo ratings yet
- Guidance and Control of Cannon Launched Guided Projectile-MorrisonDocument7 pagesGuidance and Control of Cannon Launched Guided Projectile-MorrisonvaskarthikeyanNo ratings yet
- Design of Missile Two-Loop Auto-Pilot Pitch Using Root LocusDocument6 pagesDesign of Missile Two-Loop Auto-Pilot Pitch Using Root LocusLukkana VaraprasadNo ratings yet
- W1121Document15 pagesW1121Tamil VananNo ratings yet
- Spacecraft Guidance, Navigation and Control SystemsDocument25 pagesSpacecraft Guidance, Navigation and Control SystemsA. VillaNo ratings yet
- Modern Homing Missile Guidance Theory and TechniquesDocument18 pagesModern Homing Missile Guidance Theory and TechniquesJaggerNo ratings yet