Download as pdf or txt
You might also like
- Dome Thickness Prediction of Composite Pressure Vessels by A Cubic Spline Function and Finite Element Analysis - Wang2011Document8 pagesDome Thickness Prediction of Composite Pressure Vessels by A Cubic Spline Function and Finite Element Analysis - Wang2011Hiến Đinh VănNo ratings yet
- T - Sis - Ss-Iso 6722-2 PDFDocument7 pagesT - Sis - Ss-Iso 6722-2 PDFromoNo ratings yet
- My First Book of Quantum Physics PDF Ebook by Kaid-Sala Ferrón SheddadDocument3 pagesMy First Book of Quantum Physics PDF Ebook by Kaid-Sala Ferrón SheddadAde Irman0% (4)
- Chapter 7 Robot KinematicsDocument39 pagesChapter 7 Robot KinematicsSiferaw NegashNo ratings yet
- Course Material (Students)Document46 pagesCourse Material (Students)Lamjed AouaniNo ratings yet
- Chapter 2Document22 pagesChapter 2villianNo ratings yet
- Direct and Inverse Kinematics of Serial Manipulators (Nyrio One 6-Axis Robotic Arm)Document8 pagesDirect and Inverse Kinematics of Serial Manipulators (Nyrio One 6-Axis Robotic Arm)Bubble up KadjoNo ratings yet
- Spatial Descriptions and Transformation: (Chapter 2)Document59 pagesSpatial Descriptions and Transformation: (Chapter 2)Tooba Sami ArifeenNo ratings yet
- Chapter 3 A Forward and Inverse KinematisDocument47 pagesChapter 3 A Forward and Inverse KinematisCharlton S.Inao100% (5)
- Robotics 150722060709 Lva1 App6891Document26 pagesRobotics 150722060709 Lva1 App6891Samuel AdenijiNo ratings yet
- Ch. 3: Forward and Inverse KinematicsDocument30 pagesCh. 3: Forward and Inverse KinematicsVienNgocQuangNo ratings yet
- 8 - DH Method of Forward Kinematic - 1Document5 pages8 - DH Method of Forward Kinematic - 1Naeemo IraqiNo ratings yet
- EECS4421Z: Introduction To Robotics Sample Exam QuestionsDocument7 pagesEECS4421Z: Introduction To Robotics Sample Exam QuestionsMooeez BellaamineNo ratings yet
- Dynamic Analysis of Manipulators: Lagrangian Approach: Berke GürDocument24 pagesDynamic Analysis of Manipulators: Lagrangian Approach: Berke GürOmar Seraj Ed-DeenNo ratings yet
- SRM Institute of Science and Technology: 18Mee305T - Finite Element MethodDocument45 pagesSRM Institute of Science and Technology: 18Mee305T - Finite Element MethodjumkalakaNo ratings yet
- Introduction To Finite Element Analysis Using Solidworks Simulation 2012Document22 pagesIntroduction To Finite Element Analysis Using Solidworks Simulation 2012ChandanChaudharyNo ratings yet
- Analysis and Design of Asynchronous Sequential CircuitsDocument30 pagesAnalysis and Design of Asynchronous Sequential CircuitsBeulah JacksonNo ratings yet
- Introduction To Model Order Reduction: I.4 - System Properties Stability, PassivityDocument32 pagesIntroduction To Model Order Reduction: I.4 - System Properties Stability, Passivity_RAJMEHTANo ratings yet
- Chapter Two Part 2Document30 pagesChapter Two Part 2Wiz Nati XvNo ratings yet
- Lecture 16, 17 & 18 Robot Kinematics: Dr. D. Saravanakumar, Assistant Professor, SMBS, VIT - Chennai Campus. EmailDocument55 pagesLecture 16, 17 & 18 Robot Kinematics: Dr. D. Saravanakumar, Assistant Professor, SMBS, VIT - Chennai Campus. EmailAJENANo ratings yet
- 002 Constraints and Generalized Coordinates PDFDocument27 pages002 Constraints and Generalized Coordinates PDFNiveCeciliaNo ratings yet
- ELEC3201 2021 For StudentsDocument16 pagesELEC3201 2021 For Studentsjiales225No ratings yet
- 2012-1813. DH Representation - ExamplesDocument42 pages2012-1813. DH Representation - Examplesmodisuryaharsha100% (1)
- Addis Ababa Science and Technology University (Aastu) Industrial Automation and Introduction To RoboticsDocument47 pagesAddis Ababa Science and Technology University (Aastu) Industrial Automation and Introduction To Roboticsbereketab mulugetaNo ratings yet
- 978 1 58503 549 6 2 PDFDocument21 pages978 1 58503 549 6 2 PDFSerge AmbassaNo ratings yet
- Jacobians:: Velocities and Static ForceDocument30 pagesJacobians:: Velocities and Static ForceKo PyaeNo ratings yet
- Chapter2 PDFDocument43 pagesChapter2 PDFBelayneh BirhanNo ratings yet
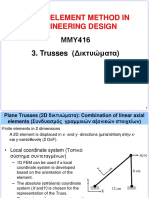
- 3 MMY416 Trusses English 2Document30 pages3 MMY416 Trusses English 2Pavlos YioukkasNo ratings yet
- CSCE 441: Computer Graphics Forward/Inverse Kinematics: Jinxiang ChaiDocument78 pagesCSCE 441: Computer Graphics Forward/Inverse Kinematics: Jinxiang ChaiAnshul ChauhanNo ratings yet
- Nanotechnology in TextilesDocument27 pagesNanotechnology in TextileshonestcheaterNo ratings yet
- TranformationDocument18 pagesTranformationkeerthiNo ratings yet
- Lec5 Forward Kinematics-ExamplesDocument33 pagesLec5 Forward Kinematics-ExamplesbalkyderNo ratings yet
- Space GroupDocument104 pagesSpace GroupBendaud bataborNo ratings yet
- Robot DesignDocument37 pagesRobot DesignengineerNo ratings yet
- TransformationOfElectricAndMagneticFields 010711A 120 126Document8 pagesTransformationOfElectricAndMagneticFields 010711A 120 126AbhishekNo ratings yet
- Robot Kinematics LECTURE 2Document36 pagesRobot Kinematics LECTURE 2Samuel AdenijiNo ratings yet
- Lecture 52Document11 pagesLecture 52vivek singhNo ratings yet
- Kinematics: Time To Derive Kinematics Model of The Robotic ArmDocument39 pagesKinematics: Time To Derive Kinematics Model of The Robotic Armnatnael demissieNo ratings yet
- Chương 04Document98 pagesChương 0421151381No ratings yet
- IE598-lecture10-projected Gradient DescentDocument9 pagesIE598-lecture10-projected Gradient DescentFaragNo ratings yet
- Process Control 5Document21 pagesProcess Control 5Mohamad AbdelkaderNo ratings yet
- Computer Vision - 3D TransformationsDocument21 pagesComputer Vision - 3D TransformationsLong Nguyễn HoàngNo ratings yet
- CH 2Document33 pagesCH 2haile barantoNo ratings yet
- SBRML Part1 Differential Geometry in RoboticsDocument28 pagesSBRML Part1 Differential Geometry in Roboticsshantam bajpaiNo ratings yet
- Eng4Bf3 Medical Image Processing: Wavelet and Multiresolution ProcessingDocument49 pagesEng4Bf3 Medical Image Processing: Wavelet and Multiresolution ProcessingSelva KumarNo ratings yet
- Guangbing Bao, Shizhao Liu, Hong Zhao: Kinematics Simulation of 4 DOF ManipulatorDocument9 pagesGuangbing Bao, Shizhao Liu, Hong Zhao: Kinematics Simulation of 4 DOF ManipulatorTrần Việt DũngNo ratings yet
- 2012-1811. Robot Arm Kinematics DH IntroDocument75 pages2012-1811. Robot Arm Kinematics DH IntroG30nyNo ratings yet
- Meshing Performance Analysis of Spiral Bevel Gears Based On Assembly MisalignmentDocument6 pagesMeshing Performance Analysis of Spiral Bevel Gears Based On Assembly MisalignmentADII 2701No ratings yet
- CGR U3T2 3 Presentation10Document18 pagesCGR U3T2 3 Presentation10Kaiwalya MatreNo ratings yet
- Game Engine Programming 2 Week 7 Module 2Document11 pagesGame Engine Programming 2 Week 7 Module 2Dean LevyNo ratings yet
- L2a - Demo - Matrix Structural AnalysisDocument5 pagesL2a - Demo - Matrix Structural AnalysisEliNo ratings yet
- Model, Motion Planning and Control of UR10: Universit e de Montpellier - LIRMMDocument15 pagesModel, Motion Planning and Control of UR10: Universit e de Montpellier - LIRMMZakaria Elhabib BOUZITNo ratings yet
- Geometric Transformations in The 2D API: 2 2 Cos, Sin 5 5Document17 pagesGeometric Transformations in The 2D API: 2 2 Cos, Sin 5 5yekychNo ratings yet
- Robot PDFDocument56 pagesRobot PDFfranklin getialNo ratings yet
- Advances in Robotics Lecture 5.Document78 pagesAdvances in Robotics Lecture 5.AkashNo ratings yet
- 2 1 StabilityDocument17 pages2 1 Stabilityjan prokopNo ratings yet
- Actuators & Sensors Based On HBLS Smart HBLS Smart Materials MaterialsDocument22 pagesActuators & Sensors Based On HBLS Smart HBLS Smart Materials MaterialsSamNo ratings yet
- Beam Dyn InputDocument10 pagesBeam Dyn Inputeeeee1099No ratings yet
- 04 Forward KinematicsDocument14 pages04 Forward KinematicssolteanNo ratings yet
- Introduction To RoboticsDocument32 pagesIntroduction To RoboticsNagarjun SinghNo ratings yet
- ComputerGraphics 3D Part2Document100 pagesComputerGraphics 3D Part2api-3799599No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Chapter 4 Lecture Notes (Joints & End-Effector) - 02 JunDocument57 pagesChapter 4 Lecture Notes (Joints & End-Effector) - 02 Junakash kahsyapNo ratings yet
- CH 03-01 Data PreprocessingDocument27 pagesCH 03-01 Data Preprocessingakash kahsyapNo ratings yet
- 5 6055321120427475323Document8 pages5 6055321120427475323akash kahsyapNo ratings yet
- Casting Amd WeldingDocument19 pagesCasting Amd Weldingakash kahsyapNo ratings yet
- HomeworkDocument3 pagesHomeworkakash kahsyapNo ratings yet
- DEMU COUP - Leviat - 17 1 EDocument28 pagesDEMU COUP - Leviat - 17 1 EJianhua WuNo ratings yet
- Mollier Hs Diagram Full Scale A3 FreeDocument1 pageMollier Hs Diagram Full Scale A3 FreehalerNo ratings yet
- Science Technology SocietyDocument19 pagesScience Technology SocietyLykaMae CagiuoaNo ratings yet
- Electronic Circuits PDF by Wayne CharlesDocument46 pagesElectronic Circuits PDF by Wayne Charlesbudi0251No ratings yet
- SEM Pure Sno2 ImageDocument5 pagesSEM Pure Sno2 Images khatakNo ratings yet
- Solucionario - Groover Ejercicios ForjaDocument6 pagesSolucionario - Groover Ejercicios ForjaEdgard López BriceñoNo ratings yet
- 2 - Ngô Văn Dũng 1505662 - 62CDEDocument63 pages2 - Ngô Văn Dũng 1505662 - 62CDEAnh NgôNo ratings yet
- Optiglaze Over Bleech Shade C&B MFH PDFDocument8 pagesOptiglaze Over Bleech Shade C&B MFH PDFDavid CNo ratings yet
- SQB (Rotational Dynamics) - With SolutionDocument52 pagesSQB (Rotational Dynamics) - With SolutionAkshat GuptaNo ratings yet
- Dhaka University Affiliated Colleges: Third Year Syllabus Department of MathematicsDocument8 pagesDhaka University Affiliated Colleges: Third Year Syllabus Department of MathematicsHasibulNo ratings yet
- Theory of 3 Sigma N 6 Sigma and Use For SMTDocument39 pagesTheory of 3 Sigma N 6 Sigma and Use For SMTTrung PhạmNo ratings yet
- 1822 Fema Elcis 63Document2 pages1822 Fema Elcis 63Nabil LiveNo ratings yet
- CV of Globe Valves Gate Valves and Check ValvesDocument2 pagesCV of Globe Valves Gate Valves and Check ValvesFred Faber100% (3)
- Experimental Fluid Mechanics PDFDocument11 pagesExperimental Fluid Mechanics PDFTheja RajuNo ratings yet
- GENG 300 Numerical Methods: Qatar UniversityDocument2 pagesGENG 300 Numerical Methods: Qatar University0verflowNo ratings yet
- 1-Electric Field and Gauss LawDocument2 pages1-Electric Field and Gauss LawAbul Basar PiasNo ratings yet
- Sand Equivalent TestDocument2 pagesSand Equivalent TestDeven PatleNo ratings yet
- Impact of FireDocument61 pagesImpact of FireDaniel MilosevskiNo ratings yet
- How To Measure The Pressure Angle of A Physical Spur GearDocument16 pagesHow To Measure The Pressure Angle of A Physical Spur Gearian_new100% (2)
- Safety Valves GSV: ApplicationDocument1 pageSafety Valves GSV: ApplicationadrianioantomaNo ratings yet
- Design of 200m3 TankDocument4 pagesDesign of 200m3 TankMiko AbiNo ratings yet
- Helius CompositesDocument15 pagesHelius CompositesKruthika K CNo ratings yet
- Mathematics For Management Course Guide BookDocument2 pagesMathematics For Management Course Guide BookuuuNo ratings yet
- Earth Pressure Calculations 2Document7 pagesEarth Pressure Calculations 2RAJAT SHARMANo ratings yet
- SlidesDocument81 pagesSlidessshahid183No ratings yet
- Ch. 12 Quantum Hall EffectDocument1 pageCh. 12 Quantum Hall EffectSupriyaNo ratings yet
- PHY301 Handouts 1 45Document191 pagesPHY301 Handouts 1 45zaheerNo ratings yet