Download as pdf or txt
You might also like
- TLE 10 Lesson 1Document111 pagesTLE 10 Lesson 1Lindsay Kirstyn Tabaniag100% (1)
- Christ Church UCC Annual Report 2022Document26 pagesChrist Church UCC Annual Report 2022Christ Church UCC - Des Plaines100% (1)
- Kra PinDocument1 pageKra PinDavid OwenNo ratings yet
- RoboticsDocument11 pagesRoboticsHari Hara Sudhan KaliappanNo ratings yet
- Please Read: A Personal Appeal From Wikipedia Founder Jimmy WalesDocument23 pagesPlease Read: A Personal Appeal From Wikipedia Founder Jimmy WalesmihirapotterNo ratings yet
- Robotics: From Wikipedia, The Free EncyclopediaDocument23 pagesRobotics: From Wikipedia, The Free EncyclopediagayaxniNo ratings yet
- Robotics: Robotics Is A Branch of Science and Engineering Dealing With The Study of Robots. It Is Involved With A Robot'sDocument14 pagesRobotics: Robotics Is A Branch of Science and Engineering Dealing With The Study of Robots. It Is Involved With A Robot'srichard_07_32105No ratings yet
- Unit I Introduction Engineering RoboticsDocument90 pagesUnit I Introduction Engineering RoboticsLAKKANABOINA LAKSHMANARAONo ratings yet
- 1 Introduction To Robotics DevelopmentDocument52 pages1 Introduction To Robotics Developmentiveynesh5No ratings yet
- Introduction To RoboticsDocument19 pagesIntroduction To RoboticsOngNo ratings yet
- DSP RoboticsDocument17 pagesDSP RoboticsHector Ledesma IIINo ratings yet
- Robot ApplicationsDocument34 pagesRobot ApplicationsBarvinNo ratings yet
- Creative TechDocument11 pagesCreative TechKaryll Althea RamosNo ratings yet
- History of RoboticsDocument21 pagesHistory of RoboticsVeekshith Salient KnightNo ratings yet
- Q3 RoboticsDocument38 pagesQ3 RoboticsyourjenjenjavertoNo ratings yet
- Notes 1 History of RoboticsDocument4 pagesNotes 1 History of RoboticsHaydee FelicenNo ratings yet
- PDF Roboics1Document65 pagesPDF Roboics1Sai Krishna TejaNo ratings yet
- Robotics With End EffectorDocument143 pagesRobotics With End Effectoreeesmvec4No ratings yet
- Me445 Robotics 2Document143 pagesMe445 Robotics 2زهديابوانسNo ratings yet
- RoboticsDocument43 pagesRoboticsChristian MendezNo ratings yet
- 14 - RoboticsDocument46 pages14 - RoboticsFrancis Carlvy BuslonNo ratings yet
- 01 Introduction To RoboticsDocument31 pages01 Introduction To RoboticsoshadhaNo ratings yet
- PaperDocument19 pagesPaperirfanNo ratings yet
- Advances in Robotics Lecture 4Document22 pagesAdvances in Robotics Lecture 4AkashNo ratings yet
- Mobility (ASIMO) and TOSY's TOSY Ping Pong Playing Robot (TOPIO) To Industrial Robots, Medical Operating Robots, PatientDocument15 pagesMobility (ASIMO) and TOSY's TOSY Ping Pong Playing Robot (TOPIO) To Industrial Robots, Medical Operating Robots, PatientyashNo ratings yet
- What Is Robotics History of Robotics Scope of Robotics Advantages Disadvantages ApplicationsDocument12 pagesWhat Is Robotics History of Robotics Scope of Robotics Advantages Disadvantages Applicationss suhas gowdaNo ratings yet
- EE381 Lec1 Week1Document94 pagesEE381 Lec1 Week1hamzanaeem2001200No ratings yet
- Robotics: 3 Pillars of Robotics 1) SenseDocument12 pagesRobotics: 3 Pillars of Robotics 1) SenseKarya ÇelikNo ratings yet
- RoboticsDocument143 pagesRoboticsDr_M_Soliman75% (4)
- ROBOTICS Lesson 1 IntroductionDocument58 pagesROBOTICS Lesson 1 IntroductionNikky MariNo ratings yet
- Group 1 D-402 Third Century B.C. and Earlier: Heron of Alexandria Ctesibius Philo of ByzantiumDocument5 pagesGroup 1 D-402 Third Century B.C. and Earlier: Heron of Alexandria Ctesibius Philo of ByzantiumnicholsonNo ratings yet
- Introduction To Industrial Robotics PDFDocument40 pagesIntroduction To Industrial Robotics PDFAswath SridharNo ratings yet
- Presentation Adapted From Space Foundation Robotics/Nanotechnology 2009Document18 pagesPresentation Adapted From Space Foundation Robotics/Nanotechnology 2009Aman SachdevaNo ratings yet
- RobotsDocument12 pagesRobotsArim ArimNo ratings yet
- Modelling of Human Leg and Robotic ArmDocument10 pagesModelling of Human Leg and Robotic ArmTarun SharmaNo ratings yet
- Robotics HistoryDocument22 pagesRobotics HistoryAli HaiderNo ratings yet
- ME424 201516 Unit 1-1Document41 pagesME424 201516 Unit 1-1saiNo ratings yet
- ME424 201516 Unit 1 PDFDocument41 pagesME424 201516 Unit 1 PDFharshaNo ratings yet
- Introduction To Robotics: College of Industrial TechnologyDocument42 pagesIntroduction To Robotics: College of Industrial TechnologyTristan Jeff BautistaNo ratings yet
- RoboticsDocument5 pagesRoboticswynwon80No ratings yet
- A Robot Is A Virtual or Mechanical Artificial Agents. in Practice, It Is UsuallyDocument8 pagesA Robot Is A Virtual or Mechanical Artificial Agents. in Practice, It Is UsuallyDivisha KapurNo ratings yet
- Robot - WikipediaDocument40 pagesRobot - WikipediaTejasNo ratings yet
- Robotics 1 - Coordinate SystemDocument102 pagesRobotics 1 - Coordinate System15.Rushikesh IrabattinNo ratings yet
- Breif History of RoboticsDocument3 pagesBreif History of Roboticsapi-253221137No ratings yet
- Robotics PPT ch-1Document29 pagesRobotics PPT ch-1SileshNo ratings yet
- What Is RoboticsDocument11 pagesWhat Is RoboticsmmNo ratings yet
- Robotics Periodical ReviewerDocument11 pagesRobotics Periodical ReviewerheynemesisNo ratings yet
- Introduction To Robotics: 1.1.what Is A Robot?Document21 pagesIntroduction To Robotics: 1.1.what Is A Robot?Dinesh KumarNo ratings yet
- 1st Edition of Robotics and Automation Guide Distrelec PDFDocument32 pages1st Edition of Robotics and Automation Guide Distrelec PDFSouhila BoukhlifaNo ratings yet
- ROBOTICSDocument25 pagesROBOTICSSudarshan TlkNo ratings yet
- Module1 AK IRDocument122 pagesModule1 AK IRbhuvankumar3877No ratings yet
- RoboticsDocument19 pagesRoboticsSaraah GhoriNo ratings yet
- Epucheu ResearchDocument12 pagesEpucheu Researchepucheu11No ratings yet
- Introduction To RoboticsDocument26 pagesIntroduction To Roboticsjoseph.morcoNo ratings yet
- The History of RoboticsDocument8 pagesThe History of RoboticsRHEA JANE PARILLANo ratings yet
- COMPUTER PROJECT TOPIC - ROBOTS - NewDocument25 pagesCOMPUTER PROJECT TOPIC - ROBOTS - Newrugvedyeram1910No ratings yet
- Topic 1 - RoboticsDocument3 pagesTopic 1 - Roboticskvidiniotis99No ratings yet
- Robotics: Ece 411: Robotics Engr. Lalaine Jean A. Ballais, EctDocument9 pagesRobotics: Ece 411: Robotics Engr. Lalaine Jean A. Ballais, Ecttsk2230No ratings yet
- Listening RobotsDocument1 pageListening RobotsDiego ToroNo ratings yet
- Modern Robotics: Present Day WeaponsDocument2 pagesModern Robotics: Present Day WeaponsfazalrazaNo ratings yet
- An Introduction to the Wonderful World of Robotics - Science Book for Kids | Children's Science Education BooksFrom EverandAn Introduction to the Wonderful World of Robotics - Science Book for Kids | Children's Science Education BooksNo ratings yet
- Assigment 1: Buck-Boost ConverterDocument4 pagesAssigment 1: Buck-Boost ConverterAbdur RehmanNo ratings yet
- SFE - Course OutlinesDocument9 pagesSFE - Course OutlinesAbdur RehmanNo ratings yet
- Capital University of Science and Technology: Department of Civil EngineeringDocument1 pageCapital University of Science and Technology: Department of Civil EngineeringAbdur RehmanNo ratings yet
- CE-5833 Construction and Safety Management: Capital University of Science and Technology, IslamabadDocument29 pagesCE-5833 Construction and Safety Management: Capital University of Science and Technology, IslamabadAbdur RehmanNo ratings yet
- CH06 Activity-Based CostingDocument20 pagesCH06 Activity-Based CostingAbdur RehmanNo ratings yet
- CSM Assignment No. 2Document9 pagesCSM Assignment No. 2Abdur RehmanNo ratings yet
- CH02 Accounting CycleDocument53 pagesCH02 Accounting CycleAbdur RehmanNo ratings yet
- MS Civil Engineering Construction and Safety Management Assignment No. 1 MCE191010 Abdur RehmanDocument5 pagesMS Civil Engineering Construction and Safety Management Assignment No. 1 MCE191010 Abdur RehmanAbdur RehmanNo ratings yet
- CE-5823 Advanced Project Management For Construction ProjectsDocument35 pagesCE-5823 Advanced Project Management For Construction ProjectsAbdur RehmanNo ratings yet
- CE-5823 Advanced Project Management For Construction ProjectsDocument26 pagesCE-5823 Advanced Project Management For Construction ProjectsAbdur RehmanNo ratings yet
- CE-5823 Advanced Project Management For Construction ProjectsDocument24 pagesCE-5823 Advanced Project Management For Construction ProjectsAbdur RehmanNo ratings yet
- CE-5823 Advanced Project Management For Construction ProjectsDocument22 pagesCE-5823 Advanced Project Management For Construction ProjectsAbdur RehmanNo ratings yet
- CE-5823 Advanced Project Management For Construction ProjectsDocument28 pagesCE-5823 Advanced Project Management For Construction ProjectsAbdur RehmanNo ratings yet
- CE-5823 Advanced Project Management For Construction ProjectsDocument18 pagesCE-5823 Advanced Project Management For Construction ProjectsAbdur RehmanNo ratings yet
- DTH Set Top Box Installation & Service Technician - ELE - Q8101 - v3.0Document42 pagesDTH Set Top Box Installation & Service Technician - ELE - Q8101 - v3.0maheshgawali155No ratings yet
- Audience Analysis TEMPLATEDocument11 pagesAudience Analysis TEMPLATETrần Thanh HuyềnNo ratings yet
- FAULT CODE 352 - Sensor Supply 1 Circuit - Voltage Below Normal or Shorted To Low SourceDocument14 pagesFAULT CODE 352 - Sensor Supply 1 Circuit - Voltage Below Normal or Shorted To Low SourceAnuar Angrac Lopez CruzNo ratings yet
- Altyre - Bard 3 Fight 1Document2 pagesAltyre - Bard 3 Fight 1Kris PitmanNo ratings yet
- Desain Ruangan CT-ScanDocument3 pagesDesain Ruangan CT-ScannewmanonmarsNo ratings yet
- Distributed Denial of ServiceDocument2 pagesDistributed Denial of ServiceneelakshijollyNo ratings yet
- k8s1 PDFDocument61 pagesk8s1 PDFSree Harsha Ananda RaoNo ratings yet
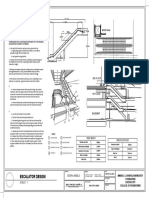
- Escalator DesignDocument1 pageEscalator DesignGeLow EdOraNo ratings yet
- Best Practices For Using Opentext Magellan Integration CenterDocument24 pagesBest Practices For Using Opentext Magellan Integration CenterJesse SeSeNo ratings yet
- 05 - Arghir Floating RingDocument32 pages05 - Arghir Floating RingAliNo ratings yet
- Ac300 Product CatalogDocument8 pagesAc300 Product CatalogIrwanNo ratings yet
- Manual: Floor To Ceiling Tube Support Unit DM-FCT-1Document9 pagesManual: Floor To Ceiling Tube Support Unit DM-FCT-1Ho PhuNo ratings yet
- Brochure PDFDocument4 pagesBrochure PDFAmel Ben YahiaNo ratings yet
- IC WBS Tree Diagram Template 8721Document1 pageIC WBS Tree Diagram Template 8721Deema sultanNo ratings yet
- Mastering JSON Processing in Snowflake Cheat SheetDocument2 pagesMastering JSON Processing in Snowflake Cheat SheetkolleruNo ratings yet
- Chapter 3-Basic FoundationDocument43 pagesChapter 3-Basic FoundationfarisNo ratings yet
- Learn ChatGPT - AA KABIRDocument34 pagesLearn ChatGPT - AA KABIRDiego MunozNo ratings yet
- 18.internationalization (I18N)Document3 pages18.internationalization (I18N)intjar AhmadNo ratings yet
- Data Monkey TutorialDocument31 pagesData Monkey TutorialRebriarina HapsariNo ratings yet
- Installing XAMPP: Step 1: DownloadDocument13 pagesInstalling XAMPP: Step 1: DownloadShashank UttraniNo ratings yet
- Theory of Computation MCQsDocument41 pagesTheory of Computation MCQssingh_arun7No ratings yet
- Zimbra NE 6.0 Release Candidate 1 Release NotesDocument29 pagesZimbra NE 6.0 Release Candidate 1 Release NotesViktor JustinNo ratings yet
- Fortigate Wireless 50Document113 pagesFortigate Wireless 50accardi86No ratings yet
- How Thick Should A PCB BeDocument12 pagesHow Thick Should A PCB BejackNo ratings yet
- Job Objective:: Resume of Abdullah Ahmed Alghamdi Kingdom of Saudi Arabia Jeddah Mobile:0560206028Document3 pagesJob Objective:: Resume of Abdullah Ahmed Alghamdi Kingdom of Saudi Arabia Jeddah Mobile:0560206028raghacivilNo ratings yet
- Economiser Energy Control For Increased Service Steam Production EngDocument20 pagesEconomiser Energy Control For Increased Service Steam Production EngSwayam JeetNo ratings yet
- PDMS Vs SmartPlantDocument24 pagesPDMS Vs SmartPlantrmm99rmm990% (1)
- UTech CMP1025 Tutorial 3Document2 pagesUTech CMP1025 Tutorial 3Leia MichaelsonNo ratings yet