Professional Documents
Culture Documents
Fanuc Manuals 1792
Fanuc Manuals 1792
Uploaded by
25 Hanha0 ratings0% found this document useful (0 votes)
121 views137 pagesCopyright
© © All Rights Reserved
Available Formats
PDF or read online from Scribd
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
© All Rights Reserved
Available Formats
Download as PDF or read online from Scribd
Download as pdf
0 ratings0% found this document useful (0 votes)
121 views137 pagesFanuc Manuals 1792
Fanuc Manuals 1792
Uploaded by
25 HanhaCopyright:
© All Rights Reserved
Available Formats
Download as PDF or read online from Scribd
Download as pdf
You are on page 1of 137
AC
Servo
Systems
Maintenance Manual
GE Fanuc Automation
GFZ-54765E/02
WARNING
‘The product described in this publication may employ bazanious voltages or might create other conditions
that could, through misuse, inartention, or lack of understanding, result in personal injury, or damage to the
product or to other equipment. It is imperative, therefore, that personel involved in the installation,
‘maintenance, or use of this product understand the operation of the product and the contents of this
publication,
‘This document is based on information available at the time of its publication. While effors have been made to be accurate,
the information contained herein does not purport to cover all details or variations in hardware and software, nor to provide
for every possible contingency in connection with instalation, operation, and maintenance. Features may be described herein
‘which are not present in all hardware and software systems. GE Fanuc Automation assumes no obligation of notice to
holders of this document with respect to changes subsequently made.
GE Fanuc Automation makes no representation or warranty, expressed, implied, or statutory with respect to, and assumes 20
responsibility for the accuracy, completeness, sufficiency, or usefulness of the information contained herein. No warrantics
of merchantability or fitness for purpose shall apply.
‘©Copyright 1989 GE Fanuc Automation North Amerie, Ine.
CONTENTS
I. AC SERVO UNIT FOR 1 AXTS
1, STRUCTURE ....-++
1.1 Models and Designated Specifications of Unite v....++
2. CONNECTIONS ....
2.1 Connection Diagram
2.2 Detailed Servo System Connection Diagrams .
1 Details of connections of cable Kl
2 Details of connections of cable K2 .
3. Details of connections of cable K3 .
4 Details of connections of cable K4
5 Details of connections of cable K5
6 Details of connections of cable K6
7 Details of connections of cable K7
8 Connections of separate regenerative discharge unit .....--
jonnection of Power Supply Transformer Tap .-...
1 Primary side connection ..
2
3
1
2
3
4
5
Connections in the power supply transformer .......
Motors and power transformers employed for each axis .......
nection Diagram of Velocity Control Unit ....
For Model 2-0, 1-0 (A06B~6050-H002)
For Model 0, 5 (A06B-6050-H102) ......
For Model 10, 20M, 20, 30 (A06B-6050-i103, H113, HLO4)
In case Model 30R (AQ6B-6050-HO0S) .
For Model 0 ~ 30 (AO6B~6050-HOO3, HO04) .
ETTING AND ADJUSTMENT FOR VELOCITY CONTROL UNIT
Setting and Adjustment for Velocity Control PCB
1 Parts location
2 Setting terminal .
3. Variable resistor
4
at
1
1
1
1
Check terminals .
jock Diagram of Velocity Control Unit ....
Bi
OUBLESHIOOTING .
Protection and Fault Detecting Functions .
Troubleshooting ..+++++eeseeeeee
Ang
"ARTS SPECIFICATIONS AND LOCATIONS ON VELOCITY UNIT ..
Model 5-0 Velocity Control Unit (A0GB~6050-H301) .
Model 4-0, 3-0 Velocity Control Unit (A06B~6050-H001)
Model 2-0, 1-0, Velocity Unit (AO6B-6050-H002) .
Model 0, 5 Velocity Unit (A06B-6050-H102) .
Model 10 Velocity Unit (A06B-6050-1103)
Model 20M Velocity Unit (A06B-6050-H113) .
Model 20, 30 Velocity Unit (AOGB—6050-H104) .
Model 30R Velocity Unit (A06B-6050-H0050) .
Model 0, 5, 10 Velocity Unit (AQ6B-6050-M003) ..
0 Model 20, 30 Velocity Unit (A06B-6050-H004) ..
IZ. AC SERVO UNIT FOR 2 AXES ..
1, STRUCTURE ....
1,1 Types of Units and Designated Specifications ......
2, CONNECTIONS
2.1 Connection Diagram .......045
Detailed Servo System Connection Diagram .
Details of connections of cable Kl .
Details of connections of cable K2
Details of connections of cable K3
Details of connections of cable Ka 245k
Details of connections of cable KS . i sent
-6 Details of connections of cable K6 aaah
7 Details of connections of cable K7
Connection of Power Transformer aie teen
Connection Diagram of Velocity Control Unit .
2.
1
2
2.3
2.4
2.5
2.6
2.7
2
2.
2
2.
2.
es
2
2.
3
cf
3.
3b
ETTING AND ADJUSTMENT OF VELOCITY CONTROL UNIT ..++.+++45
Setting and Adjustment of Velocity Control Unit PCB ...
1 Parts location
2 Setting terminal ....
3. Variable resistor .....
4
1
is
1¢
1
+1.4 Check terminals .....
cock Diagram of Velocity Control Unit «
8
1
3y
3.
3.1,
3.2 Bi
4, TROUBLESHOOTING ..+.+sseeeeeeeeeseees
4.1 Protection and Fault Detect Function
4.2 Troubleshooting «
5. PARTS SPECIFICATION AND LOCATIONS ON VELOCITY UNIT
5.1 Model 1-0/2-0 and Model 1-0/2-0 (AQ6B-6050-H201) «+...
5.2 Model 1-0/2-0 and Node1 0/5 (A06B~6050-H202)
5.3 Model 0/5 and Model 0/5 (AO6B~6050-H203) ....
III. AC SERVO UNIT FOR 3 AXES ...
Vs. STRUCTURE 4. cesses sdprepeedecnrsade
1,1 Types of Unit and Specification Number
ONNECTIONS .....
Connection Diagram
tailed Servo System Connection Diagram .
Details of connections of cable Kl .....+
Details of connections of cable K2 .
Details of connections of cable K3 se...
:4 Details of connections of cable K4 ...
+5 Details of connections of cable K5 .....+
+6 Details of connections of cable K6 .
+7 Details of connections of cable K7 ...5
+8 Connections of separate discharge unit ..
Connection of Power Transformer ..
c
onnection Diagram of Velocity Control Unit .
1 Model 0/5, Model 0/5 and Model 0/5 (A06B-6050-H401)
2 Model 0/5, Model 0/5 and Model 10 (A06B-6050-H402) .
3 Model 0/3, Model 10 and Model 10 (AQ6B-6050-H403) .
4 Model 10, Model 10 and Model 10 (AQ6B~6050-H404)
3, SETTING AND ADJUSTMENT OF VELOCITY CONTROL UNIT ..
3.1 Setting and Adjustment of Velocity Control Unit PCB ....
3.1.1 Parts Location .....
3.1.2. Setting terminal
3. Variable resistor
+4 Check terminals ..... a
Block Diagram of Velocity Control Unit ...
3.
31
3.2
4, TROUBLESHOOTING .
4.1 Protection and Fault Detecting Function
4.2 Troubleshooting «
5, PARTS SPECIFICATION AND LOCATIONS ON VELOCITY UNIT ...
5.1 Model 0/5, Model 0/5 and Model 0/5 (A06B~6050-H401) .
5.2 Model 0/5, Model 0/5 and Model 10 (AQ6B-6050-H402)
5.3 Model 0/5, Model 10 and Model 10 (AO6B-6050-H403) ......
5.4 Model 10, Model 10 and Model 10 (AQ6B-6050-H404) .....+5
APPENDIX
APPENDIX 1
1, REVERSE CONNECTION .
1.1 Connection and Rotational Direction .
1,2 Method se...
APPENDIX 2 e004
© SERVO MOTOR MAINTENANCE
Outline ...
Acceptance and Storage «
Mounting ..
Replacement of Pulse Coder ........
2. COMPENSATING CIRCUIT SETTING FOR AC SEVO UNIT ..
115
116
7
119
119
119
120
120
121
122
123
125
127
127
127
127
131
131
131
131
131
133,
135
1, AC SERVO UNIT FOR 1 AXIS
This chapter described the maintenance of AC servo unit for | axis which
drives AC servo motor Model 5-0, 4-0, 3-0, 2-0, 1-0, 0, 5, 10, 20M, 20, 30 and
30R.
1, STRUCTURE
The AC servo unit consists basically of the velecity control unit and
power transformer. In addition, the separate regenerative discharge unit may
be required according to the load conditions.
Eight types of velocity control units are available according to AC servo
motor models employed, and one velocity control unit applies to each servo
motor. Six types of power transformers are also prepared according to the
servo motor models, their combinations, loads, and primary input voltages.
One power transformer applies to one to three servo motors.
Fig. 1.1 shows and example of the structure of the AC servo unit in a
two-controlled axes NC system.
AC servo motor
Xeaxis
velocity
control
unit
Ne
control
unit
Zaxis
velocity
control
unit
Power
transformer
3-phase input armbisfigeae bath
is figure indicates an example when
Power supply two axes employ one power transformer
in common,
1.1 Example of AC Sorvo Unit Structure
1.1 Models and Designated Specifications of Units
Toble 1.1 (al
Name Specifications
For Model 5-0 -, A068~6050-H301 |
" -Ho01
For Model 4-0, 3-0
Velocity 102
control 103
uaa: For Model 20M “HHL
For Model 20, 30 -HIO04 (Note 3)
For Model 30R " -HOOS
For Japan [Teenaformer AA | _AD65-6050-n011
200V, 220v|Transformer MB | _A065~6047-W012
1 [Transformer NC HOLS
Power [For other |. a "
transformer i countries |{t#nsformer MBE tee
| 190v-550v [Transformer NCE 4023
| Common Transformer AAE A06B-6050-HO21
| 190V-550V |Transformer ABE " -HO22
| [Transformer ACE " =H023
Separate regenerative discharge unit (Note 4) "#050
Input connector Soldering type " =K100
Gore's) Crimp style type "-K103
Spare part A " -K101
Note 1. The specification of unit shipped before May in 1984 4s
‘A068-6050-H003.
Note 2, The specification of wnit shipped before May in 1984 is
AD6B-6050-HO03.
Note 3. The specification of unit shipped before May in 1984 ts
AD6B-6050-HO004.
Note 4. The unie (AQ6S-60S0-H00S) for Model 30R normally needs the separate
regenerative discharge unit.
Note 5. The input connector is used for the cable connected to the velocity
control unit, and it comprises the following parts.
One set of the input connector is required for each axis.
Table 1.1(b) shows the parts included in input connector (Soldering
type).
Teble 1.1(c) shows the ports included in input connector (Crimp
style type)
Table 1.1 (b)_ The Parts Included in input Conneetor (Soldering Type)
Nane Q'ty | Use Model FANUG specifications
Connector and cover 1 | owt | MR-20LFH* ‘K631.-0001-0134/02
Connector and cover 1_[_ ons | me-20c0e ‘A63L~0001-0134/15
Connector and cover 1 | one [mR-2onwrn* | a63L~0001-0134/05
Housing 1 | cn2_| susopw—se* ‘A63L-0001-0202/6W
Pin 5 | on2z [Rci6n-scr3** | a63L-0001-0226
Table 1.1 (c)_ The Parts Included in Input Connactor (Crimp Style Type)
Name Q'ty | Use
Model
FANUC specifications
Connector and cover | 1 | CNI
MR-20L, MRP-2OFOI*
‘AG3L~0001-0134/22
Connector and cover | 1 | CNS
MR-2OLW, MRP-20M01#
‘A63L~0001-0134/35
Connector and cover | 1 | cN6
MR-20LW, MRP-20F01*
‘A63L~-0001-0134/25
Contact. 40 |oni,6| mep—P112* ‘A63L-0001-0135/FL12
Contact 20 [ons | Mep-mi12* ‘A63L-0001-0135 /M112
Housing 1 [ona | susepw—se* ‘A63L.~0001-0202/6H
Pin 5 [ona | Rcien-s230%* ‘A63L-0001~0127/823A
* Manufacturer: HONDA Tsushi
‘** Manufacturer: Burndy Japan
n Co., Ltd.
Co., Ltd.
2. CONNECTIONS
2.1 Connection
iagram
Fig. 2.1(a) is a standard connection diagram.
K6
NC control unit
K2
Electromagnetic
Baieeg, NE Tore Power
source a transformer
acs yO
Ys
“56
‘Terminal screw M4
(When 3.5mm? cable ig used, use
erimp style tern nal 5.5~S4.)
Velocity contro!
unit
ee
KB
Machine side
Servo motor
KS
Emergency stop
EMG
ee SIS
Detector
AC 100v
10%
a 13%
16
J
Fig. 2.1 2)
Note: Cable
K3 is not needed
for
velocity control unit of 5-0.
Pig. 2.1(b) shows connection diagram when the separate regenerative discharge unit is employed.
[NC control unit
Electromagnetic
Power contactor Fuse
souree U
‘Terminal screw M4
(When 3.5mm? cable is used, use
crimp style terminal 5.5~S4,)
#
K6
Velocity control
unit
Power
transformer
[Joe
Ks.
Machine side
Serva motor
Detector
KS
Emergency stop
EMG
FHo— Ac 1o0v
Ka HOR
a15e
18
Fig. 2.1 (9)
2.2. Detailed Servo System Connection Diagrams
2.2.1. Details of connections of cable K1
Velocity control unit
NC conto! unit
vewo_} ew rt
cf cian
ie i
over} owns
ovis J cnus he
vay! Yew) ae
vey? Y-cnwn
NBL 1D cnya
sua Yes A
PRoVi QP cnn | 4gey
Haat fe PY Ewa
cn)
Cable employed:
For VEMD/EC,
0.1 ~0.18mm! paird
shielded cable.
For others; 0.18 ~ 0.3mm?
200V vinyl wire
Connector employed MR20LFH
(Honda Tsushin Kogyo, Co. Ltd.)
Note: These signals are employed from edition c of velocity control PCB
(A208-1000-0560). These are not employed in velocity control unit
for Model 5-0, 4-0 and 3-0.
Vinyle sheath
Shield
Twisted
Paper tape ——
oe air
Shield —
~__ Shiett
Pve Sheath ?
Drain wire
Cotton fiber
® io
Fig. 22.1
Be
2.2.2. Dotails of connections of cable K2
Power transformer
Ist 2nd 3rd
axis axis axis
ee
| 1A j
1H
| rom 4
{rons 1
Velocity control unit
Screw terminal Mé \
Fig. 2.2.2
2.2.8 Details of connsctions of cable K3
connector
employed
SWSEPWS
RCI6M-SCT3
(ippon Burndy
©)
{ }
Power
transformer
R
5
t
‘Velocity control unit
rua) oS
Ti)
Seow M4,
Cable employed: 0.75mm? (30/0.18) 200 heat-esistive viny! cable
Fig, 22.8
Table 2.23 (a)
Motor employed Cable enployed
Model 3-0, 4-0 0.75 mn?
Model 2-0, 1-0 eines
Model 0, 5 bs 600v
3 heat-resistive vinyl cable
Model 10, 20%, 20, 30 3.5. am
Model 30R 5.5. mm
Table 2.2.3 (b}
Input voltage of
Sote Seeiayee velocity control unit
Yodel 4-0, 2-0, 1-0 ac 120¥
Model 3-0
Model 0, 5
Model 10, 20M, 20, 30 rem
Model 30R
2.2.4 Details of connsctions of cable KA
Cabinet ‘Velocity control unit
1008 710)
ac 100v —______} Te
16 ojo]
EMG
Contact OFF at
emergency stop Zari
(Cable material: 0.75mm? 200V vinyl wire,
Fig, 22.4
2.25 Details of connections of cable KE
(2) For Model 5-0, 4-0, 3-0
Velocity control unit
715)
sasew Mas : / si spe tena
Cable material; 30/0.18 (0.75mm) Color of reed wire
Red
White
Black
Connect motor body
4-conductar vinyl cord
ee<¢
Fig. 2.25 (a)
= 10 -
(2) For Model 2-0, 1-0
Velocity control unit
T16)
Model
2-0
1-0
4
Zam swrr- 43-00
Cable material: 30/0.18 (0.75mm2) “Hirose Electric, Co,
‘conductor vinyl cabtyre cable Guide key
Cannon
Fig, 2.2.5 (6) eta
(3) For Model 0 and 5
Velocity control unit
715)
‘Connector MS31068 18-10S (Straight type)
Employed MS3108B118-10S (Elbow tyne)
screws \
ak eetwte oan 77035 abe ap HESOST 108
4-conductor vinyl cabtyre cable seer
‘Cannon DO OA
pees
Fig. 22.5 (c)
(4) For Model 10, 20M, 20, 30
‘Velocity control unit
7115)
Model
10, 20, 20M, 30
Connector MS3106B24-10S (Straight type)
Screw Ma Employed MS3108B22-22S (Elbow type)
CCable material: 3.5mm? (45/0.32) ae aaa
conductor vinyl cable Guide key
Gimmes DOT OA
co on
Fig. 2.2.5 (a)
-u-
(5) For Model 30R
Velocity control unit
Model 30R
Connector MS3106824-10S (Straight type)
Screw M4 Employed MS3108B 24.105 (Elbow type)
Cable clamp MS3057-16A
Cable material: $.mm? (70/0.32)
‘eonductor vinyl cabtyre cable Guide key
Cannon
Fig. 2.25 (e) connector
2.2.6 Detsils of connections of cable K6
(1) Model 5-0
Velocity control unit Motor model 5-0
Ns (1).(29.08)
NS (4),(59,(6)
Hl
cxsiny nd
axsao [| | arowaynit
ens) {|| Jorangerwnite
exe {| [retoviwnit
NS (16) 1} | [tack chin)
Ns (18) Tt | [owe
Ns (15) TT} [ereen
Ns (20) } | Black (thick)
Connector: MR-20LWMH_
Fig. 2.2.6 (a)
-We-
(2) Model 4-0, 3-0
Motor
Gray, Gray/White
Red, Red/White
Velocity control unit CNS(1).2).3) J
Note
(CNS (To) Violet/White
ens CD) Brawn/White
(Ons (12) Orange/White
ens (13) Yellow/White
CNS (14)
ONS (15)
CNS 8)
Ns (17)
‘CNS (18)
‘CNS (19)
‘CNS (20)
Green/White
Black
Black/White
Blue
Blue/White
Connector: MR-20LWMH *
Fig. 2.2.6 (o)
-B-
(3) Model 2-0 - 30R
Velocity contro!
unit
CNS (,2)8)
CNS (4,6),06)
Connector employed: MR-20LWMH ‘Cannon MS3106B20-29SW (Strsight type)
(Honda Tsushin Co., Lid.) ‘connector “Ms3108520-29SW (Elbow type)
Fig. 2.2.6 (o)
Cotton fiber
—~___Drain wire
Guide key
Cannon
connector
2.ig.<.
22.7 Details of connections of cable K7
Velocity control
NC control unit
unit _EN 6,218)
‘Connector employed: MR-20LWFH
(Honda Tsushin Co., Ltd.)
Catton fiber
Paper tape
Sheath (Black)
Fig. 2.2.7 (a)
aise
2.2.8 Connections of separate regeneretive discharge unit
(1) Details of connection of separate regenerative discharge unit.
Note 1)
Disconnect the jumper wire from
terminals T2(5)-T2(6) in unit HOOS
and H004, T2(4)-T2(5) in wnit
11103, H113, and HJ04. When the
separate regenerative discharge
unit is employed,
Cable employed: 2.0mm? (37/0.26)
60GV heat-resistive vinyl cable
Lee
Note 1)
HCA
Velocity control unit
Serow terminal M3.5
rai)
Regenerative
ate discharge unit
Screw terminal Ma
Fig, 2.2.8 (a)
=i6-
Q)
Details of cable K2
For connections of cable K2 in 2.2.2, change the connection of TOW! and
TOH2 as follows.
Power transformer
41
(Thermostat contact)
51
Screw terminal M4
Cable employed: 0.7Smm? (30/0.18)
200V heatresstive vinyl cable
Velocity control unit
(Unit to connect terminals
51, 52 of transformer)
ewetll
CNza
CNG)
CNet
en26)
Connector
employed
SMSEPW-5,
RCI6M-SCT3
(Nihon Burndy
Co.)
731g). (Thermostat contact)
Regenerative
discharge unit,
raw. ae
/
Screw terminal M4
Fig. 22.8 (b)
-17-
23 Connection of Power Supply Transformer Tap
More sure the input tap of the power supply transformer is set according
to the input voltage when connecting the power supply cable to the AC servo
unit.
If set incorrectly, the AC servo unit may cause trouble.
2.3.1. Primary side connestion
Connections of the transformer terminals and power supply cables U, V,
and W must follow the input supply voltage specifications in Tables 2.3.1(a)
and 2.3.1(b).
(1) For Japanese model power supply transformers AA, MB, and MC.
Table 2.3.1 (a)
7 Connection of primary-side
Supply voltage REA
200 U-2, V4, W6
2200 Url, V-3, W-5
(2) For export model power supply transformers MBE, and NCE.
Tabla 2.3.1 (b)
Connection of primary-side terminals
Supply voltage
Connection of power Strapping trans-
supply cables U, V, W | former terminals
190v U-3-7, V-L1-15, W-19-23
(Common to 200v)
4-B-12-16-20-24
230V U-2-6, V-10-14, W-18-22
(Common to 220V)
380v u-3, V-1L, WI9 4-7, 12-15, 20-23,
8-16-24
420v U-3, V-11, W-19 4-6, 12-14, 20-22,
(Common to 415V/440V 8-16-24
460v U-2, V-10, W-18 4-6, 12-14, 20-22,
(Common to 480V) 8-16-24
550v U-L, V-9, WI7 4-5, 12-13, 20-21,
8-16-24
aks.
(3) For common model power supply transformers AAE, ABE and ACE.
Table 2.3.1 (c)
Connection of primary-side terminals
Supply voltage
Connection of power Strapping trans-
supply cables U, V, W former terminals
200v U-7, V=15, W-23 8-15, 16-23, 24-7
2200 U6, V=14, WH22 8-14, 16-22, 24-6
230 U-5, V-13, W-21 8-13, 16-21, 24-5
240v U-4, V=12, W-20 8-12, 16-20, 24-4
Delta connection
380v U-6, VH14, w-22
4200 U-4, V-12, W-20
460 U-3, V=1l, W-19 8-16, 16-24 or (8-16-24)
4g0v U-2, V=10, W-18
550V U-1, V-9, WHI7
Star connection
Remarks
If more than one power supply transformer is used, both must be connected
to the tap in the same way. Also the connection of transformer overheat
must be done in the same manner.
4p
232 Connections in the power supply transformer
Domestic models
Connections for power supply Conneetions for power supply ‘Terminal array of power supply
transformers AA, MB, and MC transformers AA 31 to 36, transformers AA, MB, and MC
(Connection for 31-36 of AA is
as shown right.)
\ u ee
{IIE fust-oae Tar?
repay py, finsy 28 Taare
WIE | boss =| avs
poz0vf MILT ihe
e pe pe
sof wf ow | ww | a |W | aitate ents utr eanie Gate «)
a ce
#05005 26/08 20,30, 308
sect ng
omit rice sale tenes
weace [oor [sen
Be E = E Pulse coder F/¥ gain setting
= 5 L 5
a
ae ¥ u Pulse coder pole number, and
as 5 2 T | pais mater etelng
ae i tu i
- 38
setting ‘Standard setting fants:
ternirat ["2-0,1-0 [0]5 | 10 | 208 | 20,30 | son
SY Compensation cireuit setting
$22
823 e_fele VGHD gain setting (Note 6)
526 eo jefe[o]o | o | o [rw céreute sitter setting
825 e fefe[ ele | « |e
526 Conpensation circuit setting
827
828
529
$30 External analog current Limitter setting
sa Connect GNL(19) pin and OF
is . Ove alarm level setting
sm °
ae ee ee Current feedback gain setting (Note 7)
$36 ele| ole
337 Speed feedback gain setting (Note 8)
538 ele[ ole Compensation circuit setting
= 395
(b)
PCB A20B-1000-0560 (Edition number E)
rete 31206
ee Tian sng =
re L IE L L ‘TOH setting (Note 1)
| L L Loe L
33 i eo oh L | © | compansation eireuit acting
ao [oe pe [oe pep | ane ails Gee
oe pene os Pulse coder F/V gain setting
=
Setting Standard setting
ae Remarks
20,20 [0,5 | 10,208 | 20,30 | 30k
sa
Conpansation circuit setting
S22
323 ° fe Vor gain setting (Note 6)
5% © le | © | o | © | Fiv ctrevie Filter setting
S35 eee [ae
ie Compensetion ctreutt setting
827
528
$30 External analog current Limiter setting
(c) PCB A20B-1000-0560 (Edition number C or D)
Table 3.1.2 ()
Setting ‘Standaré setting eesas,
20,1-0 | 0,5 | 10 | 20,30 | sn
st i e | 2 | t | t | totseteing (wore 0
82 L e |e [ £ [& | teatam setting (ote 2
si 1 Eth eal me oe
eo = E | E | Ft | © | compensation etreuie setting
36 # a [ef a
37 W «[e*[« [a
S10 W u [| w | # | m | qe aterm enable (Note 3)
su # i fay] tr
siz H # | & | © |W | current toop gain setting
813 ¥ @ [ae | |e
S17 @ a
sis H w | 8 [ | & | current timie setting
519 W «fafa [a
20 a uw | # | ¥ | ® | Absotute code output enable (ote 4)
=4i =
2-0,1-0,0,5,10,20,30,.30R
2000P 2500P ~ 30001
sa L a s
Li Pulse coder pole number, and
a a vu
d) PCB A20B-1000-0560 (Edition number A and B)
5
Be ALL Hor AIL L Compensation circuit setting
:
;
- 42 -
=0)1-0,0,5,10,20,30, 308
secctng
eerninat Potse coder Remarks
20007 2500 30007
Zs * e . Pulse coder F/V gain setting
59 # L L
sie L ¥ #
Polse coder pole number, and
315 # L 1 pulse nunber setting
516 W 1 #
Note 1, If either power transformer or regenerative discharge unit is
connected actoss terminals CN2 (4) and (5), set SI to open (L side).
If neither power transformer nor regenerative discharge unit is
connected across terminals CN2 (4) and (5), set SI to short (H
side).
Note 2, Set 52 to open (L side), if the regenerative discharge unit is not
mounted, and set it to short (H side), if the regenerative discharge
unit is mounted.
Note 3, Set S10 to L side, if it is needed to check with motor power cable
disconnected,
Note 4. If S20 is set at L side, absolute codes from the pulse coder is
output to NC while VRDY is on. If VRDY is turned OFF, the alarm
code is output. If $20 4s set at H side, the alarm code is always
output.
Note 5. When the absolute value pulse coder is used, set $32 at H side.
Note 6. If $23 is short-circuited, 7V/2000 rpm will be set. If it is open,
7V/1000 rpm will be set. If models 10, 20, and 30R are used over
1500 rpm, change the above settings and NC parameters (loop gain
multipliers).
Note 7. Models 0, 5, 10, and 20M only may be short-circuited. If S35 and
$36 are short-circuited, conversion of current feedback signals
(CHIO, 11, 12) is 0,183 V/A.
Note 8. If $37 is short-circuited, the rate feedback voltage is changed from
3V/1000 rpm to 1.5¥/1000 rpm. Normally, set it in the open state.
Note 9. The way of setting is shown as following figures.
IH Da
Setting plug
DL du
(a) Setting of H side (o) Setting of L cide
As
(2) For Model 4-0, 3-0 (PCB A20B~1000-0590)
Table 3.1.2(e)
Pulse coder
ing terminal |—s599p | sour | em
setting terminal [~ro90p | 25008 = Remarks
81 R TOH setting (Note 1)
$8 R OPEN | Pulse coder F/V Gain
$10 1G alarm enable (Note 2)
S15 L L__| Pulse coder
518 a H | pote number, pulse number setting
520 i
Note 1, If power transformer is connected across terminals CN2 (4) and (5),
set SI to open (R side).
If power transformer is not connected across terminals CN2 (4) and
(5), set SI to short (L side).
Note 2. Set S10 to R side, if it is needed to check with motor power cable
disconnected.
Note 3, If the absolute pulse coder is used set S32 at ll side.
Note 4. The way of setting is shown as following Figures.
yu Du
Sting las [|
Bh 1
(a) Setting of H side (b) Setting of L side
TW TOR
(c) Setting of L side (a) Setting of R side
(3) For Model 5-0
[rerminal setting | Standard setting Remarks
sl L TOH setting (Wore 1)
82 L Pulse coder setting (Note 2)
83 L ‘Absolute pulse coder setting (Note 3)
Ey L TG, OVC alarm desable setting (Note 4)
Note 1, I€ the power transformer connected to CN2-(4) and (5), set SI at L.
If there is no connection, set $I at H.
Note 2, If the pulse coder is 1000P/rev, set $2 at L, and if 2000P/rev, set
it at a.
Note 3. If the absolute pulse coder is used, set $3 at H, and if not used
set it at L.
Note 4, Tf 7G and OVC alarms are made invalid, set S4 at H.
Note 5. Tf a 1000P/rev pulse coder is used, care should be taken in DMR
setting. (DNR setting should be double that in a normal 2000P/rev
pulse coder.)
Spb
3.1.3. Variable resistor
Toble 2.1.3,
Volune | Standard setting Remarks
RV 40% Gain setting
RV? e Offset voltage adjustment —
RWS - Tachogenerator voltage adjustment |
Rv = +50 power supply fine adjustment
Note 1, RV2-RV4 have been adjusted before the shipment from works.
Note 2. RV4 4s not employed after edition number F of PCB A20B~1000-0560.
SiS
3.1.4 Check terminals
chee!
rentck, | symbot Description
cH 1 0.687 x velocity command voltage (Note 1)
2 0.8 x velocity feedback voltage (Note 2)
3 ov ov
4 ov jov
5
Conpensation circuit
6
7 R | R-phase current command
a $s | S-phase current command
8 T | t-phase current command
4V/A for motor 5-0
10 te | R-phase current feedback | 2.4V/A for motor 4-0, 3-0
0.85V/A Zor motor 2-0, 1-0
n 1s | Sephase current feedback | 0.25V/A for motor 0,5,10,20M
(Note 3)
12 IT ‘T-phase current feedback | 0,125V/A for motor 20, 30
0.1V/A for motor 30R
3 try | Tratangle wave (Note“4)
14 ER Error voltage (Torque command)
1s | sv | +5v
16 +15V | +15V
7 | -1sv | -15v
18 10RF | 1OV reference voltage
Note 1. a = 0.344 when VHD is 7V/1000 rpm
a = 0.687 when VCMD is 7V/2000 rpm
Note 2. Motor Model 4-0 - 30R: 2.4V/1000 rpm
Motor Model 5-0 + 1,2V/1000 rpm
Note 3. 0.183V/A after edition number F of PCB A20B-1000-0560.
KG
Note 4. Triangle wave
12t15V
3602 20850
Note 5. Motor load currents (peak values) can be monitored using the sane
conversion as CHl0-12. Effective value can be obtained by
multiplying 1/72.
- 47 -
vets
a nar sun yornuon
ee oa wonodog,
1:
alia
ue |e
up
Beics
snbiog
_ J ri 2
eno x D0}9,
oot TS ‘p07
5 st sins
i
pursue yusamy “aug
TI odo
ee
U
tC poyo
spjou! oma ay
HUN JonuED AyDo}eA 30 wesbeIQ >YoIg Ze
sins
4, TROUBLESHOOTING
4.1. Protection and Fault Detecting Functions
The AC servo unit provides the following functions to protect the motor
from being overloaded and also detecting abnormal conditions inside the servo
loop.
Table 4.1
No, | Kinds of functions | indications Description
2 | overtos Contacts! signal | If the tenperature of the radiation fin of the
cones out at unit exceeds the set value to operate the
connector CN1 | thermostat or if the thermostat of pover
transformer operates, or if the thermostat of
noter operates, this overlosd alarm is
gonerated,
2 | Velocity feedback | Light-enttting | Tf the feedback cable is disconnected, TG lamp
¢isconnection aiode (LED) 1 | Lights. If 2 motor does not make x speedy start
detection Lights because of extrenely large motor torque, the
rotor 1s stopped by dynamte braking with thie
alara lamp lit,
3 | Mo-use breaker 0m button of NFB | TF an abnormal current exceeding the operating
is protruded current of no-fuse breaker flows, this NFB
operates, causing the motor to be stopped by
dynamic braking.
4 | High vottage alarm | LED HV Tights | If the DC voltage of the main power supply is
abnormally high, the motor {s stopped by éynanic
braking with HV lamp 1it,
5 | tow vottage starn | LED Lv 1ighes | If control voltage ie abnormally low, or {f the
fuse for +5V on the PCB has blown out, the motor
is stopped by dynamic braking vith LV lomp Iie.
6 | cireuie faut LED Hc tights | IF abnormal current flows to the main céreutt,
Detection the motor is stopped by dynamic braking with HC
lamp lit.
LED DC Lights | TF the regenerative discharge circuit becomes
defective, the motor 48 stopped by dynamic
braking with DC lamp Lit. TF the acceleratfon/
eceleration rate is too high, DC Lights.
7 | overcurrent alarm | LEC OVC Lights | If current exceeding spectfted value is
continuously applied longer than @ certain tine,
the motor is stopped by dynanic braking with OVC
lamp itt.
=2e=
42 Troubleshooting
Troubleshooting and fault recovery are discussed in this section. The
manual should be used to determine the causes of problems.
(1) Overload alarm
Teen
Causes of troubles
Check procedures
Countermeasures
PCR setting failure
Check {f setting pin SL of
PCE is set as specified,
Set $1 property.
Themostat of the serva
transformer 4
operating,
Remove the wires connected
to transforser terminals SL
and 52 and measure the
resistence across then,
(See section 2.3.2.)
The normal value 18 10 ohms
or less, if the eireuit is
‘open (nore than 100K), the
thermostat is operating.
If the thermostat is
operating and the surface
tenperature of the
transformer is 80 to 90°C,
check the motor current
@uring cutting. If the
surface texporature is 60°
or less, the transformer is
defective,
Change the cutting conditions.
Replace the transforner.
Radtation fins of the
unit are overheated.
Gheck the motor current.
Change the cutting
conditions.
‘Thermostat of the servo
motor 1s operating.
Gheck the motor current.
Ghange the cutting
conditions.
S69.
(2) 76 alarm
(3) Circuit breaker operates
Teen | Causes of troubles Check procedures Countermeasures
1 | Motor power line is not | TF TC alarm occurs without | Reconnect power cable.
connected to terminals | giving any move conand
(5), (, (7) of after turning on the pover
terminal board T1 of | supply, tt may possibly be
velocity control unit, | caused by the disconnection
or the motor power line| Failure.
is disconnected
hal Fvay.
2 | PCB setting failure Check the set condition
according to 3.1,
3 | Putse coder feedback | Check the feedback cable. | Reconnect the feedback cable.
signal is disconnected
4 | Motor current exceeds | Check the motor current. Change the cutcing
Note | the ratings conditions
Note) OVC alarm is detected after PCR A20B-1000-0560 edition number is d.
other parts are
defective in velocity
control unit
ten | Causes of troubles Check procedures Countermeasures
2 | ctrcute breaker ts The operating condition of | Reset the etreuit breaker
operating the cireuit breaker is es after turning off che power
illustrated below. supply, (IF the eireuit
fof FEE] ts burton ts brealer cannot be reset soon,
C//pratruded forvard | wait for about 10 minutes
during operation. | before resetting it).
DY} depress this button
after turning off
the power supply
for resetting the
ctreuit breaker.
2 | Diode module DS or Te eireutt breaker operates [Replace dioe module DS or
Just when turning on the
over supply after
countermeasure in Item 1,
velocity control unit.
Mechanical loed is
‘abnornal
Observe PCB CHO, HII or
om2-cH3,
0 check
fon an oscilloscope
if the Ioad current.
Of the motor exceeds the
rated current during rapid
Bode.
Eliminate abnormal Toad of
the machine eide,
aise
(4) HV alarm
teen | Causes of croubles ‘heck procedures Countermeasures
1 | Impure AC power voltage | Check 1F the servo Repair tap connection
ie higher chan transformer cape are
specified properly connected,
2 | Serve motor is Check if the insulation Replace motor
defective resistance is normal between
the motor armature (power
Line) and the body.
3 | toed inertia is Increase the acceleration/
excessive deceleration time constant
4 | Pop te defective HV alarm occurs without any | Replace PCB
defect in Items 1, 2, 3.
(5) LV alarm
Tten | Causes of troubles Check procedures Countermeasures
1 | npur AC power voltage | Check {F the input AC power | Correct the tap connection
is lower than specified | voltage and tap connection
of servo transforner are
correct.
2 | connection failure Gheck if 424¥, 45V, and 450 | Correct connections
between servo of PCB are normal. Cheek if
cransformer and PCB CN2 | servo transformer terminals
a1 = 49 (AC 18V) and PCB C2
G, 2, 3) are connected
properly.
3 | Fuse for +5v is blow | check if the fuse for 15V is | Replace the fuse
blown.
4 | Pop is defective The LW alarm occurs without | Replace PCR
any defect in item 1, 2, and
i
= 52-
(6) HC alarm
Teen
Causes of troubles
‘heck procedures
‘Countermeasures
Wrong connection of
motor power Line
NC slarm does not occur when
turning on the pover supply
after disconnecting the
notor poer Line.
(Since the gravity axis may
drop in this case, support
it or disconnect the drive
cable of gravity axis brake)
Reconnect the motor power
Line correctly.
Uf the motor power Line ts
checked with disconnecting
it, set setting terminal S10
to L side, otherwise TG alarm
‘Transistor nodule is
defective
Check If BC alarm occurs
ven turning on the pover
supply after disconnecting
the power Line according to
item 1,
Turn off the power supply,
renove PCB, and observe the
right terminal of the
transistor module by @
ctreuit tester.
‘The transistor module is
defective, if the resistance
between terminals {s several
(within 109),
Replace tranaistor module,
ACheck resistance between
C1-E1, C2 also becween EL,
c2-e2.
wicheck resietence between
CL-E and also between
02-B2,
Internal short-eireutt
fetlure of motor
windings
Cheek motor windings for
normal {nsulation,
Replace motor
POB is defective
Tf HC alarm occurs without
any defect in ftens 1, 2, 3,
POR is defective.
Replace PcB
-535
(7) DC alerm
Teen ] Causes of troubles Check procedures Countermeasures
1 | Discharge transistor Ql | DC alarm occurs soon after | Replace transistor Ql.
ie defective or POS ie | curning on the pover supply. | Replace PCR.
defective
2 | Poe setting is improper | Setting terminal $2 1s set | Set 2 properly
to L aide although the
separate regenerative
aischarge unit ts used.
3 | Frequent acceleration/ | Check {F the positioning Decrease the acceleration/
deceleration Frequency exceeds 1 - 2 deceleration Frequency by
tines/sec at high speed. In | providing the dwell
this case, DC alarm vill not
‘occur when the positioning
frequency is reduced.
(8) Servo ready signal is not output
ten | Causes of troubles ‘Check procedures ‘countermeasures
1 | ac 100 1s not supplied | Check ££ AC 100V 1s supplied | Check the energency stop
to velocity control across terminals No. (3) and | button on the operation panel
unit (4) of terminal board T1 of
velocity control unit.
2 | the velocity control | Check 1f red aterm LED For countermeasures against
unit a in alam status | indicators Light on Fob or | these alarms, see (2),
pot. w=)
3. | Pos control power Gheck the voltage at check | Change the tap connection of
voltage +5V or #15V is | terminals cus, cis, servo transformer.
abnormal (HI7-CH3 on PCB mounting Correct the connection
disses between servo transformer and
Check the connection between | PCB CH2, and replace PCB.
servo transformer cerminals
‘and PCB CH2.
4 | nypria 10 H2 or relays | Check if relays RLYL and Replace PCB
RLYL, RLY2 of PCB are | RLY2 are operating.
defective
5 | circuit breaker off Check the indieating button | See (3).
cireult breaker.
eh te
(9) Motor does not rotate when the move command is given.
Tten | Causes of troubles Check procedure Countermeasures
1 | Power line is not TG alarm cceurs end the Connect the power line
connected motor does not rotate at properly
an.
2 | Enable signai (eNBLa, Check enable signals
BIBL) are not applied (eweua, ENBL2)
to PCR
3 | Pos is defective or PCB | Check iF +2V, 415V, and +5v | Replace PCB or reconnect the
is not properly fon PCB are normal. cable properly
connected
4 | Vetoctey commana Observe PCB Cit (voMD}-cu3 | Give the velocity comand
voltage (CMD) fs not | (GND) on an oscilloscope. | voltage (VCHD)
[_| rptse
(10) ove alarm
(This protection is applied from edition number C of velocity control PCB
‘A20B-1000-0560..)
Tten | Causes of troubles Check procedure Countermeasures
1 | Feedback signal of Check Feedback cable Connect the feedback cable
pulse coder is not connection.
connected
2 | Motor current exceed | Check motor current. Change the cutting condition
nominal value
aa8.a
=965
5. PARTS SPECIFICATIONS AND LOCATIONS ON VELOCITY UNIT
5.1 Model 5-0 Velocity Control Unit (A06B-6050-H301)
Gi
220
f [FANUC LTD macmirsara 2
L 160 — - 160 max
Fig. 5.1
Ee
5.2 Model 4-0, 3-0 Velocity Control Unit (A06B-6050-H001)
2a
rye
| Resistor module
| geouo001-0160 —~|
P| !
a | Capacitor
° + A42L-0001-0121
CJ i. |
° i a
OL o | a
f se
Aad
‘A65L-0001-0135/104
160 max
Fig, 6.2
ipo s
5.3. Model 2-0, 1-0, Velocity Unit (AO6B-6050-H002)
Osh
230
Resistor module
‘AAOL-0001-0147
_ 1 (2) (21 fe) fel
‘Transistor module
‘ASOL-0001-0111
Resistor
‘AaoL-oo01- |
o118/40ws02
Diode module
‘ASOL-2001-
0134
Magnetic conta:tor
‘ASBL-O001-0180
Spark kill
ATAL-000)
‘0008/1050
Circuit breaker
|
ee
‘60L-0001-0143/15A
PCB
Ke
vis
Cecooncrd MOO
Fig. 53
Connector
‘A63L-0001-0222/A1
Spacer
‘A98L-0004-0069/6N
Heat sink
‘ASOL-6001-0240
Surge abso
‘ASOL-2001
Capacitor
139
‘Ad2L-0001-0121
‘Terminal block
‘A65L-00010134
ages
5.4 Model 0, 5 Velocity Unit (AQ6B-6050-H102)
| Resistor module
NOL Poor era
su Holder
czy, PS
seronmrwere] 2) CR] CEI! teasisor module
Sp} caactor
Capacitor
Sri327ee
H2
Pon
‘Transistor
E+ Asok 0001 0097
|____ Connector
U) ~near-eaor-oee2-a1
Heat sink
Bag
Magnetic
contactor
Resistor module
TAOL= 0081-8178
[a
Surge absorber
Terminal block
| aationarae
| TCLerIT |
Fig. 5.4
> pe
5.5 Model 10 Velocity Unit (AOGB-6050:H103)
‘Terminal bosrd
b-— Sy nes Holder
1
t Thermos ‘Transistor module
| H A7L-t001-€013100 ——AsoL-0001-0088
Resistor module
FE 4 S15 }— capacitor
a Cont
Diode module [amor aeieat
ASOL-2001-0175 |
| j—Tansistor__
Heat sink
— ‘SOL 6001-0262
eO |
-O sO
ko sony
"2 70 - a
Ie] oS) assE-wwos avr
wu
Sb Terminal board
LOOM
Ziesasaaa
Breaker
NL 300T-OTATA
Fig. 55 = |
She
5.6 Model 20M Velocity Unit (A06B-G050-H113)
{ | Resistor module
| ‘Aa0L- 0001-0184
‘Thermostat
A571 -0001-0043/100
“Transistor module 651-0001 -0224/A)
Diode =2001-0097/
Transistor module A501 0001-009)
L Lier fo
Ragone AE y S| Capacitor stern
Tat L
| aot oi Sxl ee
LA | ‘i z Connector \63L_-0001-0209/A1
yo aa Diode
} Diode __aso =o01-0135
| : 4 Ht Capacitor Transistor Sepa
rot A “Rig-OOO-OT3B/68| = ae A501 -0001-0099
' = alee 81-000! -0256
ta Capacitor FETED)
5 Tz -0001 OTS 22
| Breaker sice song OU /K
pe} Suet tober Restor modus 440, -0001-0177
SBC OOO OOE57EN
Fig, 56
‘Terminal board 4651-0001 -0154
Gos
5.7 Model 20, 30 Velocity Unit (AU68-6050-H104)
Lu
Holder
“aati
at vou
Transistor module
Diode
Diode module
a501-5001-017
Magnetic
contactor A
Breaker
AGOL-AOD1=O14I194,
Fig. 5.7
Connector
Heat shink
\ spacer _
‘AL, 8009-0060 48
Resistor module
‘Terminal board
‘esk-o061-0138
aE
5.8 Model 30R Velocity Unit (AO6B-6050-H0050)
os
240.
Fan
‘ASOL-0001-0100/A
Holder A98L-0001.0358
a =
vl Terminal block — eI
| stoner : Diode AsoL-2001.0097/0066
| ak Be
| AS TL ODOT OIITEO bs Conner A63L-0001-0222/A1
Diode module Tol i O
! lO}! Ire oo)
4500 2001-0137 ;
be one” xs01-0001.0103
| biose ale
| AOL 2007-0135 8 Sper A961-0004.0069/6N
— Tensor shel a
fraz-0001 0178 | {ASOL-DO0TO09T Obs j—fapactorA421-0001-0100_
oH
Seavey contactor Spark killer A74L-0001-0008/10D50
Aac-0001-018T [See ite Te 0001-80050
Sune absorber ASOL-2001-0139
i ga
Ciro breaker ASOL-0001.0143/208
Pee.
Fig.5.3
Toon
‘Terminal block A6S1-0001-0280
HU : oo
160 max
ayer
5.9 Model 0,5, 10 Velocity Unit (A06B-6050-M003)
20
Terminal lock
Resco 7|_Hovder ase1-oo0.0358
U = eee Lape | biode asoL-2001-0097/0066
D ‘A57L-0001-0043/100 a
i Gonnestor A631-0001-0229/A01
i cupetor = Trantor
| asian nae cot owale™ as0L-o001-0091
7x01 0001-0147
‘Transistor ASOL-0001-0097
Diode module
‘ASOL-2001-0134
Diode —
‘ASOL-2001-0135
Resistor module
J [asoL-0001-0146
ose
Magnetic contactor__—
‘ASSL-0001-0181
Copacitor A42L-0001-0122
Spark killer |
‘A74L-0001-0008/10050
Capacitor A42L-0001-0121
Circular breaker
‘A6OL-000I-0143/158
Terminal
Black A6SL-0001-0134
BAAaeA
OT
150 |
160 max
Fig. 5.9
Surge absorber ASOL-2001-0139
Sine
5.10 Model 20, 30 Velocity Unit (A06B-6050-H004)
ose
230
‘Terminal block
Baa
AdOL-0001-0144
Resistor module
‘A401-0001-
foias
|
]
|
|
|
|
i
‘A6SL-0001-0234/3P0)
‘Thermostat =
‘A57L-0001-0043/100
Diode module
‘ASOL-2001-0134
Diode
‘ASOL-2001-0135
Transistor
ASOL-0001-0097 =~ |
Magnetic contactor
‘S8L-0001-0181
Spark killer
‘ATAL-0001-0008) 10050
Circuit breaker
DB
AGoL-0001-0143/1s4 ~~
Fig. 5.10
Lf Oo
fal = Holder A961-0001-0358
PR) SL tie asox-zoor-c0r7ru00c
ry Connector AG3L-0001-0222/41
[to lo 5
bre £ Transistor
| module” ASOL-0001-0103
OA |r Fy
= [2 = Capacitor A42L-0001-0100
° o —E—E—=—E—_—v
Spacer A981-0004-0069/6N
Heat sink ASOL-6001-0242
Capacitor A421-0001-0122
Surge absorber ASOL-2001-0139
Capacitor A42L-0001-0121
OOOO
150
160 mex
II, AC SERVO UNIT FOR 2 AXES
This chapter describes the maintenance of AC servo unit for 2 axes which
drives AC servo motor Model 2-0, 1-0, 0, 5.
Combination of two motors are described in Table 1.1.1, Refer to Table
eles
1. STRUCTURE
The AC servo unit for 2 axes consists of the velocity control unit and
Power transformer. Three types of velocity control units are available
according to the combinations of AC servo motor models employed. One velocity
control unit applies to two servo motors, The specifications of the power
transformer are the same as those of a power transformer employed when two
servo units for one axis are used according to the combinations of motor
models.
Fig. 1.1 shows a configuration example in an NC system of 2 controlled
axes.
ACservo moter
X axes
Transducer
NC control Velocity control a
unit ‘unit L_
(2axes type)
Zaxes
Transduces|
S-phase input
ower supply Power transformer
Fig. 1 A Configuration Example of Using AC Sorvo Unit for 2 Axes
Ss
Applicable motor
Name Specifications Remarks
L axis |M axis
2-0/1-0 | 2-0/1-0 | ao6n-6050-H201
Velocity —— rs
control | 2-0/1-0 | 0/5 A06B~6050-H202
unit: aml es =p -
ors o/s A06B~6050-H203
5 = Refer to 2.1 in Chapter 2 in the descriptions
Oger Crane tarmer for FANUC AC SERVO MOTOR series (B-54762E).
Input connector (Note) AO6B-6050-K200 Soldering type
Note:
‘The input connector is used for the cable connected to the velocity
control unit, and it comprises the following parts. One set of the
input connector is required for 2 axes.
Parts contained in the input connector (soldered type) are indicated
in the Table 1.1(b).
Parts contained in the input connector (crimp style type) are
indicated in the Table 1.1(c).
Table 1.1 (b)_ Parts Included in Input Connector
Nane aey | Use Model FANUC specifications
Connector + cover | 2 | CNIL,M | MR-20LFH * | _A63L-0001-0134/02
Connecter + cover | 2 | CNSL,M | MR-20LWMH * | _A63L-O001-0134/15
jonnector + cover | 2 | CN6L,M | MR-2OLWFH * | _A63L-0001-0134/05
| tousins 1 | cx2_| suseew-5 ** | _ A631-0001-0202/6"
Pin 5 | on | Rclew-scra ** | 631-001-0226
* Manufacturer: HONDA Tsushin Co., Ltd.
** Manufacturer: Burndy Japan Ltd.
- 70 -
Table 1.1 (c) Parts Included in Input Connector (Crimp style type)
Name Qty] Use Model FANUC specifications
Connector + cover | 2 | CNILsM,N | MR-20L, mRP-20F01 * | A63L-0001-0134/22
Connector + cover | 2 | CNSL,M,N | MR-20LW, MRP-20M01* | A63L~0001-0134/35
Connector + cover | 2 | CN6L,M,N | MR-20LW, MRP-2OFOI* | A63L~0001-0134/25 |
Contact 80 | oN1,6 | MRP-FIi2 * | A63L-0001-0136/8112
Contact 40 Ns | MRP-ML12 * | A63L-0001-0134/m112
Housing U cn2__| suseew-s | A63L-0001-0202/6W
Pin 5 cnz[Rciey-s23a__—-** | ~A63L-0001-0127/8234 |
* Manufacturer:
** Manufacturer:
=a
HONDA Tsushin Co., Led.
Burndy Japan Ltd.
-wu-
2. CONNECTIONS
2.1 Connection Diagram
Note 1, For details of cables Kl - K7, see 9.1.1 - 9.1.7.
Note 2, Connections of cables Kl and K7 differ according to NC control unit.
For details, see the connecting manual for each NC,
Flectromagnetic
contactor Fuse
Power yo LC F
‘Terminal screw Ma
(When 3.5mm? eable i wed,
Use enimp style terminal
358)
souice —o
AC38. ss
Ww
“5
-
Velocity
control
‘unit for
2x
Machine a
Seno moor
(«:) |
@
|
Sere motor
Emergency stop
Nt
Trane
Transducer
2.2. Detailed Servo System Connection Diagram
2.2.1 Details of connections of cable K1
NC control
mae <7, VoMDL.M| CNIL, MC)
PDOOQOOC wenn ernc ae >
= AAS
|
ovirt.a) enrL,ate)
OVL2L. MY CNIL.MGo
VDYIL.MD CNL.
vebY2L.Md CNIL Mtn
=
ENBLIL,M] CNIL Mla
id peo
*~
PRDY ILM? CNL] +
ROYAL, MT CNiL, Mod
SALMIL, MJ, CNIL U6)
Connector MR20LFH (Honda Tsushin Co., Ltd.)
(For the connector terminal arrangement, see 8.4)
Cable employed:
‘VCMDJEC; 0.1~0.18mm? paired
shielded cable
Other cases; 0.18~0.3mm? 200V
vinyl wite
Vinyle sheath
Shield
Paper tape
‘Twisted pair
SeiQ)
now: eee
Fig, 2.2.1
-13-
22.2. Details of connections of eable K2
Power transformer
Ist 2nd 34d
unit
Velocity control unit
2.23 Details of connections of eable K3
Connector | sMsceWs
employed
RCI6M-SCT3
Power transformer
3
Velocity control unit
Screw M4
(Cable employed: 2,0mm?, 600V heat-resstive viny! wire)
Fig, 22.3,
2.24. Deulls of connections of cable K4
cabinet Velocity conteal unit
n
Ae NaS sae a
18 —o4-o——_}
Contact OFF at ane
emergency stop aor
(Cable employed: 0,75 mm?, 200V vinyl wire}
Fig, 22.4
= aa/a
)Bumndy Japan Ltd)
225
wm
@)
Details of connections of cable KS
Model 2-0, 1-0
‘Velocity control unit
T1(5L,M)
Model
2-0
1-0
44
‘Screw Ma \ RMISWTP-45410)
(Cable employed: 30/0.18 (0.75 mm?) “Hirose Electric CO. Gite key
‘4-conductor vinyl cabtyre cable
Model 0 and 5
Velocity control unit 9 os yy
T1(6L,M)
THEM)
screwma _\
Cable employed: 2.0mm? (37/0.26)
‘conductor vinyl cabtyre cable
Fig. 2.2.5 (b)
-15-
Connector smployed
Cable clamp MS30S7-10A
MS3106B18-108 (Straight type)
{1M83108B18-108 (Elbow type)
Guide key
fro on
co OB
2.2.6 Details of connections of cable KE
Velocity contro! unit Motor
crs. marae) |
CNSL Mi)
CNSL Mis)
Connector employed: MR-20LWMHL
(Honda Tsushin Co,, Ltd.)
Guide key
Braided wire
‘Twisted paired
wire
MS3102A 20-29PW
Fig. 22.6
ain.
2.2.7 Details of connections of cable K7
Velocity contro!
unit CNGL M(D/218) PC Sea
cnet
ens, Man,
eNeL.. m9
CNGL,MOD,
Connector employed: MR-20LWFH
(Honda Tsushin Co,, Ltd.)
Cotton fiber
Paper tape
Fig. 22.7
2.3 Connection of Power Transformer
Refer to the same subsections in Chapter I in this manual,
Hae
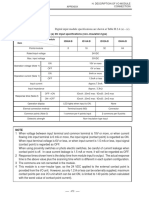
2.4 Connection Diagram of Velocity Control Unit
Sone
CNB wasose NS stanse ONG nanose
Pum cxecutr Eee
Ham [| woe [ wave || “Hosen 4 : a
TEAL ALAL | oma | Tom | som] 4149-1 200-0820
5L-6L 400m2 | 400mN} 120ma
wn | Se
IM-2MSM-IM| 170ma| s0mQ[ _S0ma
[ace [aime] i2ima | 20m
v \z s
Eo
om 5 uk
al - wee
ae a $
&
:
é
or 7 3
rests E
i } Etat
ae
Tee 3
a aT 1
° 201 AC2-0/1-0 + AC2-0/1-0
3 202 ACB-O/1-0 + ACO/S
H203 ACO/5 + acors,
Ete
70 Nc
(vewoy
‘A20B- 1001-0470
PcB2
10 POWER
TRANSFORMER
A16B- 1200-0520
PCB!
10
MoToR
(PuLco}
ONT peau (CNT 10 sexs)
To we
(Pucca)
3, SETTING AND ADJUSTMENT OF VELOCITY CONTROL UNIT
3.1. Setting and Adjustment of Velocity Control Unit PCB
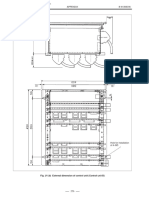
2.1.1. Parts location
(1) A16B-1200-0520 (Mother board)
°
cHiCM
cn? 3
cHIEM
°
cHTM
CHIAL cng.
CHICL
°
CHIL
A16B-|200-0520/ mmm
A20B- 1001-0470
FS/ Fuse
= 80 —
(2) A20B-1001-0470 (child board)
HIT
p 16
HAM
5 HI2M
HII
sl HOM
a] Oov “eh.
tan ipo x0 on
il] Owe woeO fp
Jeno] J cneu| enon} | cnsw 3
g
lo | frowe Ito | free 3
Motor Moto z
- s 3
saa S34 a
[ewe Tone | cNIM TeNc g
q
Note 1. Two PCB is | sets.
Note 2, Part location on PCB may be changed without notice.
-8l-
3.1.2. Sotting terminal
PCB A20B-1001-0470
A16B-1200-0520
Table 3.1.2
Terminal | Standard setting
setting | 2-o/1-0 | 0/5 |
ab he oe “Lt __| TOW setting (ore 1) |
ie x x | DC alarm setting (Note 2)
n | 4 | Te alarm enable _ ___ Gore 3)
W mo! Sao Eae
u W | current limit setcing
iH
H | Absolute code output enable (Note 4)
e © | Compensation circuit setting
@ o | VOMD gain setting (ote 5)
° | P/V circuit Filter setting
sz * _| compensation circuit setting
° °
x x | F/V anput pulse width setting (Note 6)
Le Gurrent Loop gain setting
a W_ | 16 elarm enable
° | Setting for absolute pulse coder (Nate 7)
x x | OVC alarm level setting
Terminal Pulse coder ae
mokteng 2o00r | 2500e | 3000P
ut H__| puise coder F/V gain setting
S9LM u L L
S14L,M L W H
~S1SiM, H L L__| Pulse coder pole nunber and
naa es a pulse number setting
Note 1. I£ the power transformer is connected to terminals CN2(4) and (5),
set Sl at L side.
If the regenerative
short-circuit state.
state,
Note 2.
discharge unit is mounted,
If it is not mounted,
= 82s
set $2 in
set $2 in the open
the
Note 3. If check 1s required without connection of the motor power cable,
set S10 at L side.
Note 4. If S20 is set at L side, absolute codes from the pulse coder is
output to NC while VRDY is on, If VRDY is turned OFF, the alarm
code is output. If $20 is set at H, the alarm code is always
output.
Note 5. If $23 is short-circuited, 7/2000 rpm is set, and if it is open,
7¥/1000 rpm is set.
Note 6, If $29 is short-circuited, the velocity feedback voltage is changed
from 3¥/1000 rpm to 1.5V/1000 rpm. Normally, set it in the open
state.
Note 7. If ABS pulse coder is used, set S32 in the open state.
Note 8. Setting operations are shown in the Pig. below.
Setting plug DH ae
pu Iga c
(a) Set at H side (b) Set at L side
e- “ea
Lek tek
(c) Set at Le side (d) Set at R side
3.1.3. Voriable resistor
Table 3.13
Volume [Standard setting Remarks
RVIL, RVIM, RVIN 50% Gain setting
RV2L, RV2M, RV2N = Adjustment of offset voltage
RV3L, RV3M, RV3N - Adjustment of velocity feedback voltage
Note 1. RV2L, H, N and RV3L, M, N are adjusted before shipping from the
factory.
Note 2. Settings of RVIL, M, and L are the sane regardless of the oumber of
versions.
~ 83 -
8.1.4 Check terminate
Tabla 3.1.4
Check terminal | Symbol Contents
CHIL,H vcMD | a x velocity conmand voltage (ore 1)
CHL.M TSA | 0.8 x velocity feedback voltage
CHIL,M ov | ov
one ov | ov (ote 2)
A Compensation circuit
HEL, M
CH7L,M R current command
CHBL,M current command
CHOL,M T current connand
CHLOLM im current feedback | 1.18 A/V
CHLILM IS current feedback | Motor 1-0, 2-0)
CHI2L.M It__| T-phase current feedback | 4.00 A/V (Motor 0, 5)
cna TR | Triangle wave (ote 3)
CHIAL ER | Error voltage (Torque command voltage) (Note 4)
cHIS av |
HIG +isv_[_+15v
cHi7 =isv | -15v
Note 1. a = 0.344 when VOM is 7V/1000 rpm
2 = 0,687 when VCMD is 7¥/2000 rpm
Note 2. Setting terminal 84 is on the PCB A16B-1200-0520,
Note 3. Maveform of triangle wave is as follows.
azeisv
360+302see ————]
Wote 4. Motor load currents (peak values) can be monitored using the sane
conversion as CHIO-12. Effective values can be obtain by
multiplying 1/72.
= 84 -
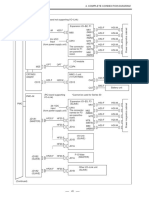
ses
[Regenere,
tive
control
circuit
Curent AC servo motor Detector
T
Tats Pracnic
AP TERA | [oases ncsere motor peter
z ©) Pale coder)
So <* Dynamic
_____ | fs
iru
Torque command
omy ee Ly
ee SY
tsi
command trom PO"D, pw | bprives
pomece 7
Ente og. | Amputie
eee So LJ
ot BS
Es ion detect
carat
To postion paver] | Rece
control unit out + Beat | Cares
Torque command Fig cana
. oe soe Ae =
Vetoity com To=>"Fioa or
postion o%0, i Dag ory
sel cael
SL ar bate fe wy atti it
tw co. *2 Amplifier circuit,
cfm Bis
T owe OF
in
Tete
To position power |_| prec]
contol unt cauit | —[ sea
UN jonueg AyD0[9A Jo uBeIG OIG TE
4. TROUBLESHOOTING
4.1. Protection and Fault Detect Function
4.2. Troubleshooting
For subsection 4 ~ 4.2 refer to the same subsection in Chapter I in this
manual.
= 86S
aii
Resor module
Nameplate
Norse breaker
Tp ae
Nameplate
Terminal block
\ Spank kar
saree
(Capacitor ‘Teansisor module
(sag 0001 0148 Tem san et
Connector
ose
Fin
(LOzH-0S09-890¥) 0-2/0-L I@POW PUR O-Z/O-L IPPON L'S
LINN A.L19073A NO SNOILV907 GNV NOLLVOISIOadS SLUVd “Ss
- 98 -
Spacer
Restor module inde module
Name
we priate
Ate Wpe2-0037 a
Noruse breaker Magnetic contactor
Transistor
“Transistor module
3500-0091 -0094
apacitor
TSP coe
ety
.
{20ZH-0509-890¥) S/0 POW pur O-Z/O-L IPPON Z's
aes
Resistor module
Diode module
— Thermostat
Magnetie contactor 13%. 0001 0083/1
Novfuse breaker
“Transistor module
‘Ase -0001-0091
Connector
Spat
50091-0389.
“Tepmioa lok
Fin
‘Reston sale
(€0ZH-0509-a90¥) S/o IePOW pue s/o ePOW E°S
Ill, AC SERVO UNIT FOR 3 AXES
This chapter describes the maintenance of AC servo unit for 3 axes which
drives AC servo motor Model 0, 5, and 10.
Combination of three motors are described in Table 1.1.1. Refer to Table
Deed
1. STRUCTURE
The AC servo unit for 3 axes consists of the velocity control unit, the
power transformer and the discharge unit.
Four types of velocity control unit are aveileble according to the
combinations of AC servo motor models employed. One velocity control unit
applies to three servo motors.
One power transformer is employed according to the combinations of motor
model.
A regenerative discharge unit is a resistor unit which consumes the
regenerated energy by the motor.
If the AC servo motor models employed are rather small type having a
little regenerative energy, a regenerative discharge unit may be unnecessary.
Fig. 1,1 shows a configuration example of an NC system with 3 controlled axes.
AC SERVO motor
é: Kak
¥ axie
NC contro! Velocity control
‘ait unit for 3 exes
Oo,
Pe
Regenerative
3 phase input Power discharge
power supply transformer unit
Fig. 1-1. A Typical Configuration Using an AC Servo Unit for 3 Axes
=93-
1.1. Types of Unit and Spe
ication Number
Table 1.1 (a) Types of Units and Specification Number
Applicable motor
Name Specification | Remarks
L M N
0/5 ors ors A06B~6050-401
Velocity 0/5 ors 10 A06B-6050-H402
control unit
o/s 10 10 ‘A06B-6050-H403
Note 1 10 10 10 A06B-6050-H404
For Japan Transformer MB | A06B-6047-HO12
200V
220V Transformer MC | A06B~6047-HO13
Power For other Transformer MBE | A06B-6047-HO22
transformer | countries
l9ov - 550v | Transformer MCE | A06B-6047-#023
Common to ‘Transformer ABE | A06B-6050-4022
ALL countries
Note 2 190v - 550V | Transformer ACE | A06B-6050-4023
Regenerative discharge unit DCUA A06B-6050-H050 | Note 3
Regenerative discharge unit DCUB ‘A06B-6050-H052 | Note 4
Regenerative discharge unit DCUC A06B-6050-H051 | Note 5
Input connector (Soldering type) A06B-6050-K202 | Note 6
Input connector (Crimp style type) 4068-6050-K203 | Note 7
Note Specification number differs according to a motor conbination.
Note 2, If the specifications of the velocity control unit are
A06B-6050-H401 or -1402, one of transformers MB, MBE and ABE should
be used.
If the specifications of velocity control units are A06B-6050-H403
or -H404, one of transformers MC, MCE and ACE should be used.
Note 3, To be used when the regenerative energy from the motors of three
axes is rather large employing the velocity control unit
‘A06B-6050-H4O1.
Note 4, To be used when the regenerative energy from the motors of three
axes is rather large employing the velocity control unit
AD6B~6050-H402 or A06B-6050-H403.
Note 5. One set should be used for one velocity control unit A06B-6050-H404.
2.94 =
Note 6.
Input connector includes connectors to be employed on the connecting
cables to the velocity control unit. One set should be used for 3
Parts contained in the input connector (soldered type) are indicated
in the Table 1.1(b).
Parts contained in the input connector (crinp style type) are
indicated in the Table 1.1(c).
Table 1.1 (b} Parts Included in Input Connector (Soldaring type)
Name Q'ty Use Model FANUC specifications
Connector + cover | 3 | CNIL.M,N | MR-20LFH — * | A63L-0001-0134/02
Connector + cover | 3 | CNSL,M,N | MR-20LWm * | A63L-0001-0134/15
Connector + cover | 3 | CN6L,M,N | MR-20LWPH * | _A63L-0001-0134/05
Housing 1 nz | susepw-5 ** | A63L-0001-0202/6w
Pin 5 en2 | Rci6m-scr3 ** | A63L-0001-0226
‘Table 1.1 (c} Parts Included in Input Connoctor (Crimp style type)
Neme Q'ty | Use Model FANUC specifications
Connector + cover | 3 | CNIL.M.N | MR-20L, MRP-20F01 *| A63L~0001-0134/32
Connector + cover | 3 | CNSL,M,N | MR-20LW, MRP-20M01%| A63L-0001-0134/35
Connector + cover | 3 | CN6L,M,N | MR-20LW, MRP-20F01*| AG3L-0001-0134/25
Contact. 120 | cni,6 | mep-ril2 | A63L~0001-0134/F112
Contact. 60 ns | Mrp-m112 | A63L~0001-0134/m112
Housing 1 cn2__| sus6pw-s ‘##| A63L~0001-0202/60
Pin 5 on2 | RCL6M-S23A ‘#*) A63L-0001-0127/823A|
* Manufacturer: HONDA Tsushin Co., Ltd.
** Manufacturer: Burndy Japan Ltd.
= 955
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Fanuc Serise OoDocument313 pagesFanuc Serise Oo25 HanhaNo ratings yet
- 61393e OModelCD (573 615)Document43 pages61393e OModelCD (573 615)25 HanhaNo ratings yet
- 61393e OModelCD (616 633)Document18 pages61393e OModelCD (616 633)25 HanhaNo ratings yet
- 61393e OModelCD (488 572)Document85 pages61393e OModelCD (488 572)25 HanhaNo ratings yet
- 61393e OModelCD (389 487)Document99 pages61393e OModelCD (389 487)25 HanhaNo ratings yet
- 61393e OModelCD (351 388)Document38 pages61393e OModelCD (351 388)25 HanhaNo ratings yet
- 61393e OModelCD (198 264)Document67 pages61393e OModelCD (198 264)25 HanhaNo ratings yet
- 61393e OModelCD (314 350)Document37 pages61393e OModelCD (314 350)25 HanhaNo ratings yet
- 61393e OModelCD (265 284)Document20 pages61393e OModelCD (265 284)25 HanhaNo ratings yet
- 61393e OModelCD (107 197)Document91 pages61393e OModelCD (107 197)25 HanhaNo ratings yet
- 61393e OModelCD (059 106)Document48 pages61393e OModelCD (059 106)25 HanhaNo ratings yet
- Electrical Diagram 6PDocument28 pagesElectrical Diagram 6P25 HanhaNo ratings yet