Download as pdf or txt
You might also like
- FANUC Robotics VariablesDocument488 pagesFANUC Robotics VariablesAndres Romero83% (12)
- Fanuc Rj3 Manual PDFDocument2 pagesFanuc Rj3 Manual PDFAdam0% (4)
- FANUC Profinet TIA Portal Integration PDFDocument96 pagesFANUC Profinet TIA Portal Integration PDFTryclop Automation86% (7)
- IRVision 3DL Operator Manual (A-86994EN01) (Preliminary)Document146 pagesIRVision 3DL Operator Manual (A-86994EN01) (Preliminary)Raphael Gomes RodriguesNo ratings yet
- FANUC-Fronius CommunicationDocument26 pagesFANUC-Fronius CommunicationSreema Aruvi71% (7)
- R30iB Plus Profinet I-Device, IO-Controller, and Safety (CP1604) Configuration With Firmware 2.7Document48 pagesR30iB Plus Profinet I-Device, IO-Controller, and Safety (CP1604) Configuration With Firmware 2.7Maycon Santos Da Silveira100% (3)
- Setting Up A Password System On Fanuc Robots (R-30iB V8.30P)Document7 pagesSetting Up A Password System On Fanuc Robots (R-30iB V8.30P)Amine AbassiNo ratings yet
- FANUC Rack MappingDocument2 pagesFANUC Rack MappingHenrique Trebilcock80% (5)
- Fanuc Robot ProfinetDocument10 pagesFanuc Robot ProfinetDamian RamosNo ratings yet
- ModBusTCP Setup&Operation Manual (B-82844EN 01)Document55 pagesModBusTCP Setup&Operation Manual (B-82844EN 01)Juan Francisco Sanchez MassadiNo ratings yet
- Fanuc User Socket MessagingDocument1 pageFanuc User Socket MessagingTensaiga100% (1)
- FANUC Software OlpcPRODocument2 pagesFANUC Software OlpcPROJavierJBVNo ratings yet
- 600 ECU Tuning Manual 3v00 PDFDocument61 pages600 ECU Tuning Manual 3v00 PDFLIMBERTOLEDONo ratings yet
- M-410iB450 Maintenance Manual (B-81925EN 04)Document194 pagesM-410iB450 Maintenance Manual (B-81925EN 04)Alejandro LedezmaNo ratings yet
- Tip WearDocument21 pagesTip WearMario DuranNo ratings yet
- Variables de Sistema FANUCDocument770 pagesVariables de Sistema FANUCLakisha Blevins50% (4)
- ROBO TRAINING PowerPoint PresentationDocument56 pagesROBO TRAINING PowerPoint Presentationravindra191274No ratings yet
- User's Manual For REMIND EPC 50Document50 pagesUser's Manual For REMIND EPC 50Power Flower100% (4)
- 07 - HUAWEI - Service PresentationDocument47 pages07 - HUAWEI - Service PresentationSav SashaNo ratings yet
- ServogunSetupUsersManual v1.0Document64 pagesServogunSetupUsersManual v1.0Rodrigo_Roboter100% (6)
- Fanuc Modbus CommunicationDocument10 pagesFanuc Modbus Communicationfenix5114No ratings yet
- Mastering Procedures (R-J Through R-30iB)Document13 pagesMastering Procedures (R-J Through R-30iB)Meet PAtel100% (1)
- Global Tip Dress Setup Users Manual For 7.50122013 REV 1.4Document48 pagesGlobal Tip Dress Setup Users Manual For 7.50122013 REV 1.4arturo100% (1)
- Fanuc RoboguideDocument22 pagesFanuc RoboguideMarcelo Nogueira100% (3)
- FANUC Educational Cell Exercises PDFDocument240 pagesFANUC Educational Cell Exercises PDFjorgemoody100% (2)
- Fronius Ethernet Interface Single GroupDocument24 pagesFronius Ethernet Interface Single GroupSandro Lourenço100% (1)
- Spot Welding Function R30iB Manual Del OperarioDocument130 pagesSpot Welding Function R30iB Manual Del Operariopedro100% (2)
- R J2 RemasteringDocument16 pagesR J2 RemasteringGerritNo ratings yet
- FANUC IO Products PDFDocument4 pagesFANUC IO Products PDFtom100% (1)
- R-30iA Cimplicity Operator Manual (B-82604EN 01)Document90 pagesR-30iA Cimplicity Operator Manual (B-82604EN 01)YoganandhK100% (1)
- FANUC Series: Operator'S ManualDocument104 pagesFANUC Series: Operator'S ManualZied RaouakNo ratings yet
- Payload SettingDocument22 pagesPayload SettingBobyNo ratings yet
- V6.40 ServoGun Training GuideDocument57 pagesV6.40 ServoGun Training GuideVickocorp Slp100% (3)
- Software Options FANUCDocument12 pagesSoftware Options FANUCIvanMakarovNo ratings yet
- FANUC R-J3iB - Maintenance Manual For Europe - B-81465EN-1-02Document345 pagesFANUC R-J3iB - Maintenance Manual For Europe - B-81465EN-1-02sierrapr92% (12)
- Series: Operator'S ManualDocument152 pagesSeries: Operator'S ManualZied Raouak100% (1)
- Tutorial CX ProgrammerDocument193 pagesTutorial CX ProgrammerDejan MihailovicNo ratings yet
- PLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingFrom EverandPLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingRating: 4 out of 5 stars4/5 (1)
- Error List PS 5000 / PS 6000 Technical InformationDocument53 pagesError List PS 5000 / PS 6000 Technical InformationAlexNo ratings yet
- PL-USB Quick Start Guide SEPT2018Document2 pagesPL-USB Quick Start Guide SEPT2018Alex100% (1)
- VisionR 30iaDocument14 pagesVisionR 30iaNahum Alamilla100% (3)
- Fanuc I/O Unit-Model A: Connection and Maintenance ManualDocument246 pagesFanuc I/O Unit-Model A: Connection and Maintenance Manualcamgz32No ratings yet
- R-30iB IRVision Introduction (FANUC)Document3 pagesR-30iB IRVision Introduction (FANUC)amapoloNo ratings yet
- FANUC Robot Series R-30iB CONTROLLER - MantenanceDocument8 pagesFANUC Robot Series R-30iB CONTROLLER - MantenanceRicardo André Pereira100% (1)
- Student Exercises - Summary: Education CellDocument217 pagesStudent Exercises - Summary: Education CellJasmin MrkaljevićNo ratings yet
- Fanuc SerieDocument56 pagesFanuc SerieMary BelNo ratings yet
- R-J3iC Robot Link User ManualDocument88 pagesR-J3iC Robot Link User ManualSebautomatisme0% (1)
- IPendant Customization Guideline Software EngineeringDocument119 pagesIPendant Customization Guideline Software Engineeringerwin_teichmannNo ratings yet
- RJ Controller Maintenance ManualDocument435 pagesRJ Controller Maintenance ManualKien Nguyen TrungNo ratings yet
- Software Installation - FanucDocument190 pagesSoftware Installation - FanucFernando FigueredoNo ratings yet
- FANUC's Standard SCA Sealing Programming (Version4.0)Document20 pagesFANUC's Standard SCA Sealing Programming (Version4.0)Leinad OicaloNo ratings yet
- Interference Prevention Area Function: Output SignalDocument4 pagesInterference Prevention Area Function: Output SignalNAIT OTMANENo ratings yet
- Torque Robotics & Solutions: WWW - Torquerobotics.inDocument9 pagesTorque Robotics & Solutions: WWW - Torquerobotics.inChandra sekhar Battu100% (1)
- 30ia DCS Cartesian Position Limit Avoidance and RecoveryDocument8 pages30ia DCS Cartesian Position Limit Avoidance and RecoveryJorge Valdez100% (1)
- Fanuc Thickness Check ManualDocument5 pagesFanuc Thickness Check ManualChandra sekhar Battu100% (1)
- FANUC Ladder III Software V6.81Document248 pagesFANUC Ladder III Software V6.81Pablo Hernandez50% (2)
- TOYOPUC - Lineup - E - M2063-8E - Seleccion de Modulos + PLCDocument64 pagesTOYOPUC - Lineup - E - M2063-8E - Seleccion de Modulos + PLCdimarclNo ratings yet
- Mikom Remote Unit Software ManualDocument35 pagesMikom Remote Unit Software ManualealforaNo ratings yet
- AU2 PLC Conveyo 28may2010Document13 pagesAU2 PLC Conveyo 28may2010scribdweeNo ratings yet
- 10G EPON OLT Quick Operation GuideDocument13 pages10G EPON OLT Quick Operation GuideStcAzad100% (1)
- Toyopuc Line Up EngDocument28 pagesToyopuc Line Up Engdollare100% (1)
- 0 Series ControllerDocument13 pages0 Series ControllerSuresh RamachandranNo ratings yet
- OEE Toolkit RC Revised ManualUSDocument49 pagesOEE Toolkit RC Revised ManualUSapi-3708143100% (1)
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- User Manual: Original Instructions (En) US VersionDocument205 pagesUser Manual: Original Instructions (En) US VersionAlexNo ratings yet
- GX Work 3 Manual BasicoDocument156 pagesGX Work 3 Manual BasicoAlexNo ratings yet
- RV-3S/3SJ/3SB/3SJB Series: Mitsubishi Industrial RobotDocument96 pagesRV-3S/3SJ/3SB/3SJB Series: Mitsubishi Industrial RobotAlexNo ratings yet
- CC-Link IE Field Network Basic Reference ManualDocument70 pagesCC-Link IE Field Network Basic Reference ManualAlexNo ratings yet
- Robot Model Codes PDFDocument5 pagesRobot Model Codes PDFAlexNo ratings yet
- Installation Manual: Smart Vision SystemDocument29 pagesInstallation Manual: Smart Vision SystemAlexNo ratings yet
- Grove Yb 5515-2Document32 pagesGrove Yb 5515-2Frank William Romero OrjuelaNo ratings yet
- XPDP56 Release NotesDocument140 pagesXPDP56 Release Notesdiegomatta13No ratings yet
- Installing and Routing Cables BWS 1600GDocument30 pagesInstalling and Routing Cables BWS 1600GCristian NeacsuNo ratings yet
- Installation CASB383Document2 pagesInstallation CASB383Yuri OliveiraNo ratings yet
- Gis MCQDocument8 pagesGis MCQPuneet Kumar JadonNo ratings yet
- EPC-Logistics Planning Factsheet R1-0 ENUDocument2 pagesEPC-Logistics Planning Factsheet R1-0 ENUĂĦmađ ẼßidiiNo ratings yet
- CRM Vs CemDocument12 pagesCRM Vs Cemnehal10No ratings yet
- Principles of Digital Communications Digital Modulation TechniquesDocument12 pagesPrinciples of Digital Communications Digital Modulation TechniquesAnanyan KalepalliNo ratings yet
- MANUAL AUDIFONOS KSM-750BK DynamikDocument23 pagesMANUAL AUDIFONOS KSM-750BK DynamikFredy MolinaNo ratings yet
- Rman Case StudiesDocument34 pagesRman Case StudiesThirumal ReddyNo ratings yet
- Voltex ElectricalDocument80 pagesVoltex Electricalmustang460100% (1)
- PIX-36 Catalogue Schneider 1Document46 pagesPIX-36 Catalogue Schneider 1ARYA JENANo ratings yet
- Embedded Systems: ComputerDocument115 pagesEmbedded Systems: Computermgr_ganeshNo ratings yet
- Comprehensive List of Excel Keyboard Shortcuts - 97 Shortcuts To Boost Your Productivity - ChandooDocument23 pagesComprehensive List of Excel Keyboard Shortcuts - 97 Shortcuts To Boost Your Productivity - ChandoonrscNo ratings yet
- FADEC PresentationDocument76 pagesFADEC PresentationWeerapat Siri100% (1)
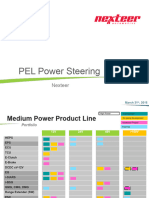
- Pel Nexteer 2016-03-31 Customer RlsDocument26 pagesPel Nexteer 2016-03-31 Customer Rlsmonutilisation0No ratings yet
- Kraft Food Australia Case Analysis: Maricris M. Usita Oliver M. Dimaano Marcelo C. MendozaDocument7 pagesKraft Food Australia Case Analysis: Maricris M. Usita Oliver M. Dimaano Marcelo C. MendozaKhris UsitaNo ratings yet
- Siemens - G120 - 04 STARTER Connection To Target Device enDocument41 pagesSiemens - G120 - 04 STARTER Connection To Target Device enKoertBNo ratings yet
- International StandardDocument3 pagesInternational Standardavandervort578No ratings yet
- Comunicador Hart Yokogawa YHC5150XDocument99 pagesComunicador Hart Yokogawa YHC5150XFrancisco Navarro BarrientosNo ratings yet
- MSC CS Syllabus 2Document44 pagesMSC CS Syllabus 2Alexis BlackNo ratings yet
- WhatsApp MessengerDocument5 pagesWhatsApp MessengerFabiano AndradeNo ratings yet
- Allestec 800 F&G PanelDocument66 pagesAllestec 800 F&G PanelyasserdekNo ratings yet
- Wiring-diagram-Avanza Combination Meter Manual OnlyDocument2 pagesWiring-diagram-Avanza Combination Meter Manual OnlyMurham Munir100% (4)
- XGC80 I PDFDocument14 pagesXGC80 I PDFDIBNESH PANDITANo ratings yet
- NEW - Civil Engineering Board Exam CoverageDocument10 pagesNEW - Civil Engineering Board Exam Coveragehetler luceroNo ratings yet
- RX 360 GMP Audit Manual Data Governance and Data IntegrityDocument24 pagesRX 360 GMP Audit Manual Data Governance and Data Integrityjess100% (2)
- Audition User ManualDocument4 pagesAudition User ManualLuis AgeroNo ratings yet