Download as pdf or txt
You might also like
- 2Document628 pages2gayeon2511No ratings yet
- 미분적분학 (교재)Document679 pages미분적분학 (교재)a92441744100% (1)
- 7. 중적분Document150 pages7. 중적분이학송 (레미연)50% (2)
- 서울과기대 수리논술Document242 pages서울과기대 수리논술j7younghNo ratings yet
- PETER V. O - NEIL 공학수학 연습문제 1장 2장 PDFDocument11 pagesPETER V. O - NEIL 공학수학 연습문제 1장 2장 PDF조수용No ratings yet
- 2021 5-1-1.함수의 뜻과 그래프Document7 pages2021 5-1-1.함수의 뜻과 그래프서다빈(학부학생/언더우드국제대학 생명과학공학)No ratings yet
- 2 - Chapter.22,23,24,25,26 2Document115 pages2 - Chapter.22,23,24,25,26 220031002dNo ratings yet
- 5. 급수Document81 pages5. 급수이학송 (레미연)No ratings yet
- 국제올림픽물리문제풀이집Document353 pages국제올림픽물리문제풀이집Changhyun BaekNo ratings yet
- 일반물리학 연습문제 풀이 (2장)Document8 pages일반물리학 연습문제 풀이 (2장)박이새No ratings yet
- Flipbook PDF CompressDocument30 pagesFlipbook PDF Compress이준희 / 학생 / 재료공학부0% (1)
- 리만적분연습문제 해석학수준Document20 pages리만적분연습문제 해석학수준변정윤No ratings yet
- 실험2. 그래프매칭Document4 pages실험2. 그래프매칭김민재No ratings yet
- (CMS) 2015 Kmo 1Document15 pages(CMS) 2015 Kmo 1JAE WON ChoiNo ratings yet
- 공리적설계 (황은하)Document54 pages공리적설계 (황은하)박승훈No ratings yet
- 영어작문 템플릿 필수구문 총정리Document17 pages영어작문 템플릿 필수구문 총정리ks5184No ratings yet
- 제 02장 다이오드 응용Document35 pages제 02장 다이오드 응용이승아No ratings yet
- HFSS100 TipsDocument124 pagesHFSS100 TipsInJune Yeo0% (1)
- Max Well 100 TipsDocument118 pagesMax Well 100 Tips김진각No ratings yet
- 고물Document333 pages고물오시영No ratings yet
- 기출의 파급효과 - 삼각함수, 사인법칙, 코사인법칙Document63 pages기출의 파급효과 - 삼각함수, 사인법칙, 코사인법칙강영민No ratings yet
- 기하학 PDFDocument17 pages기하학 PDF준곽No ratings yet
- 전력공학 교재Document612 pages전력공학 교재jong88ksNo ratings yet
- 원소의 주기성Document48 pages원소의 주기성hyunyoung256No ratings yet
- 2.회로기판고장진단및수리기초 기본교안Document110 pages2.회로기판고장진단및수리기초 기본교안bloodyseo083 lolNo ratings yet
- 고급수학Document390 pages고급수학leicNo ratings yet
- 전자부품 가이드북3-인덕터, 발진자Document10 pages전자부품 가이드북3-인덕터, 발진자K SiriusNo ratings yet
- 수학 교과서Document320 pages수학 교과서08jenniferloveisneverinvainNo ratings yet
- 수학독본4권 PDFDocument312 pages수학독본4권 PDF강대현No ratings yet
- 회로이론 및 제어공학 (2015년)Document96 pages회로이론 및 제어공학 (2015년)이승현No ratings yet
- 12장 인버터 응용Document52 pages12장 인버터 응용조용규No ratings yet
- 학부 대수학을 위한 정수론 통합파일Document266 pages학부 대수학을 위한 정수론 통합파일남easyNo ratings yet
- 3학년고급물리학Document2 pages3학년고급물리학justinseo007No ratings yet
- 고) 화학2 교과서Document32 pages고) 화학2 교과서yeeunpark2016No ratings yet
- 반도전 PE의 기능 및 역할Document2 pages반도전 PE의 기능 및 역할Dong Ju ShinNo ratings yet
- 선형대수학의 개요 Introduction to Linear Algebra: Keon M. LeeDocument337 pages선형대수학의 개요 Introduction to Linear Algebra: Keon M. LeeYoungsue HanNo ratings yet
- 고지Document245 pages고지오시영No ratings yet
- 전자회로실험 (부록) PDFDocument52 pages전자회로실험 (부록) PDF김동하No ratings yet
- 해석학 - 미적분의 역사Document24 pages해석학 - 미적분의 역사api-26384312No ratings yet
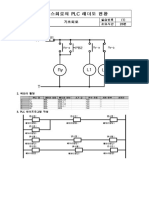
- 시퀀스회로를 plc회로로 변환Document35 pages시퀀스회로를 plc회로로 변환kyeong cheol leeNo ratings yet
- 2024 - 3Document21 pages2024 - 3tgy5mr5mk5No ratings yet
- 02 ChapDocument48 pages02 Chapandytoby1004No ratings yet
- 화학교과세특 (3305손은결) 3Document9 pages화학교과세특 (3305손은결) 3손은결100% (1)
- 전자회로의 기초Document44 pages전자회로의 기초지용No ratings yet
- 기하Document194 pages기하ouchany6No ratings yet
- 24 1 1Document48 pages24 1 1psycopomp13245768No ratings yet
- 신경전도 분석집 - 최종본Document63 pages신경전도 분석집 - 최종본smxl1119No ratings yet
- 양자 역학Document13 pages양자 역학조수용No ratings yet
- 20고등하이탑물리Ⅰ 3권 (01 96)Document96 pages20고등하이탑물리Ⅰ 3권 (01 96)Morning MondayNo ratings yet
- 2025 3 2Document272 pages2025 3 20409jhbNo ratings yet
- (수리논술나침반) 시즌 ⅩDocument521 pages(수리논술나침반) 시즌 ⅩLeonard ByunNo ratings yet
- 20장 기출문제 문제지Document4 pages20장 기출문제 문제지정해민No ratings yet
- 3.5 2계선형미방 (비제차-미정계수) PDFDocument23 pages3.5 2계선형미방 (비제차-미정계수) PDF이세연No ratings yet
- PH F 1280 Sol 20150525Document495 pagesPH F 1280 Sol 20150525Hongmin Jung100% (1)
- 2025학년도 수능 대비 지인선 N제 Season1 문제Document114 pages2025학년도 수능 대비 지인선 N제 Season1 문제wjeong499No ratings yet
- 심화수학2 - 6단원 통계 - 인쇄용 - 19-12-28Document56 pages심화수학2 - 6단원 통계 - 인쇄용 - 19-12-2820201312윤서연No ratings yet
- 로직웍스 설명서Document29 pages로직웍스 설명서Semmi HemmiNo ratings yet
- 물리학추천교재Document4 pages물리학추천교재bigcow60No ratings yet
- 240101 - 다항식의 연산 (난이도상) - 문제지Document11 pages240101 - 다항식의 연산 (난이도상) - 문제지jisung8610No ratings yet
- As 118104 Im-8000 C 635B12 KK KR 2041 2Document44 pagesAs 118104 Im-8000 C 635B12 KK KR 2041 2jsNo ratings yet