Download as pdf or txt
You might also like
- Code Wizard Workshop NotesDocument29 pagesCode Wizard Workshop NotesRenato SimõesNo ratings yet
- SynthesisDocument51 pagesSynthesissudhir100% (2)
- Final 8051Document79 pagesFinal 8051Mahaboob Shareef100% (1)
- Microcontroller 8051Document76 pagesMicrocontroller 8051Anand GharuNo ratings yet
- Avamar CLI Guide 2020 Docu91838 PDFDocument166 pagesAvamar CLI Guide 2020 Docu91838 PDFindependent tntn0% (1)
- Python and GPS TrackingDocument12 pagesPython and GPS TrackingserfaryNo ratings yet
- Brochure Pss Sincal en s4Document6 pagesBrochure Pss Sincal en s4Jorge CáceresNo ratings yet
- 8051 FullDocument69 pages8051 FullMazo Ahmed ShiponNo ratings yet
- 08.601 MBSD Module 1Document39 pages08.601 MBSD Module 1Assini HussainNo ratings yet
- مسيطرات كاملDocument101 pagesمسيطرات كاملahmed aliraqiNo ratings yet
- Modul E4160 Unit 2 Mikrocontroller Mikro ProcessorDocument12 pagesModul E4160 Unit 2 Mikrocontroller Mikro ProcessorRAJA ARIF SHAH BIN RAJA OSMAN100% (1)
- Esd 1Document40 pagesEsd 1154Soyal LonareNo ratings yet
- Unit 01 (2nd Part)Document50 pagesUnit 01 (2nd Part)Udbhav PachisiaNo ratings yet
- 1.8051 MicrocontrollerDocument34 pages1.8051 MicrocontrollervanithaNo ratings yet
- Lecture 3 Architectureofthe8051microcontrollerDocument32 pagesLecture 3 Architectureofthe8051microcontrollerrosestrikesNo ratings yet
- IOT FILE FinalDocument16 pagesIOT FILE FinalHardik UpasaniNo ratings yet
- 354 33 Powerpoint-Slides CH9Document44 pages354 33 Powerpoint-Slides CH9Saravanan JayabalanNo ratings yet
- Pic 16F877Document115 pagesPic 16F877narendramaharana39100% (1)
- 01 2ESD-lec1Document25 pages01 2ESD-lec1amar amarNo ratings yet
- Biomedical Engineering B.E III Year Embedded Systems: Unit-TWO Microcontroller and Programming Lesson - 1Document18 pagesBiomedical Engineering B.E III Year Embedded Systems: Unit-TWO Microcontroller and Programming Lesson - 1REKHA SENCHA gs0801bm161043No ratings yet
- Embedded System Unit 1 (VTU)Document20 pagesEmbedded System Unit 1 (VTU)GucciNo ratings yet
- COMP 231 Microprocessor and Assembly LanguageDocument55 pagesCOMP 231 Microprocessor and Assembly LanguageAanchalAdhikariNo ratings yet
- FMPM Unit 5Document41 pagesFMPM Unit 5riddheshsawntNo ratings yet
- Implementation of Digital Clock On FPGA: Industrial Training Report ONDocument26 pagesImplementation of Digital Clock On FPGA: Industrial Training Report ONAdeel HashmiNo ratings yet
- New 8051 MeterialDocument113 pagesNew 8051 Meterialpraneeth saiNo ratings yet
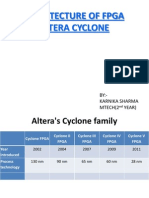
- Architecture of Fpga Altera Cyclone: BY:-Karnika Sharma Mtech (2 Year)Document29 pagesArchitecture of Fpga Altera Cyclone: BY:-Karnika Sharma Mtech (2 Year)karnika143100% (1)
- Lecture OneDocument36 pagesLecture OneMworozi DicksonNo ratings yet
- Microcontroller 8051 - PART1Document65 pagesMicrocontroller 8051 - PART1Shreyash ChaudhariNo ratings yet
- Presentation of 8051Document178 pagesPresentation of 8051sivar22No ratings yet
- Microprocessor ArchitectureDocument80 pagesMicroprocessor Architectureboniface ChosenNo ratings yet
- Human Detection RobotDocument16 pagesHuman Detection Robotdabangajay50% (2)
- Chapter 2 - Embedded System ProcessorsDocument7 pagesChapter 2 - Embedded System ProcessorsStephanie CalabungNo ratings yet
- Module 1Document43 pagesModule 1Yashwanth CseNo ratings yet
- HSECPresentation Lec2 2022Document36 pagesHSECPresentation Lec2 2022Jyda MatSochNo ratings yet
- 57 Ma NotesDocument21 pages57 Ma NotesKajal GoudNo ratings yet
- Avr Risc MicrocontrollerDocument11 pagesAvr Risc MicrocontrollerAmy OliverNo ratings yet
- Microprocessor and ControllerDocument18 pagesMicroprocessor and ControllerSai Murali SirapuNo ratings yet
- 2.classification of PLCsDocument51 pages2.classification of PLCsEmmanuel MatutuNo ratings yet
- Quize 1,2Document98 pagesQuize 1,2GaNo ratings yet
- ECET 209 Introduction To MicrocontrollersDocument62 pagesECET 209 Introduction To MicrocontrollersdhurgackNo ratings yet
- ControllerDocument142 pagesControllerlyalashwanyNo ratings yet
- MCA Sessional1 2023 24Document87 pagesMCA Sessional1 2023 24Jayraj SONINo ratings yet
- IC615 Embedded Systems - 23 - 09 - 2020 PDFDocument154 pagesIC615 Embedded Systems - 23 - 09 - 2020 PDFHussainNo ratings yet
- Lecture 3Document17 pagesLecture 3Himanshu RohillaNo ratings yet
- FChapter 1 - Microcomputer ArchitectureDocument27 pagesFChapter 1 - Microcomputer ArchitectureDharrshen SanmugamNo ratings yet
- MICROCONTROLLERSDocument35 pagesMICROCONTROLLERSEzequiel Posadas BocacaoNo ratings yet
- Embedded System NotesDocument8 pagesEmbedded System NotesSaurabh SinghNo ratings yet
- COMP 231 Microprocessor and Assembly LanguageDocument62 pagesCOMP 231 Microprocessor and Assembly LanguageAarush TimalsinaNo ratings yet
- 1.0 PIC Programming in CDocument18 pages1.0 PIC Programming in CMohd HafizNo ratings yet
- 11.microcontroller NewDocument26 pages11.microcontroller NewPrince AhmerNo ratings yet
- CS 8491 Computer ArchitectureDocument103 pagesCS 8491 Computer ArchitectureMUKESH KUMAR P 2019-2023 CSENo ratings yet
- MP MC Unit 1Document125 pagesMP MC Unit 1M RahilNo ratings yet
- MC Lab Manual-2013Document76 pagesMC Lab Manual-2013saisuchandanNo ratings yet
- Module - 1Document41 pagesModule - 1ManjuanthNo ratings yet
- PC Controlled Wireless Multipurpose Robot For Surveillance SystemDocument41 pagesPC Controlled Wireless Multipurpose Robot For Surveillance SystemFiroz Ahmed KhanNo ratings yet
- Arduinocourse 30-01-23Document327 pagesArduinocourse 30-01-23Phúc NguyễnNo ratings yet
- 89E516RD2 SiliconStorageTechnology PDFDocument91 pages89E516RD2 SiliconStorageTechnology PDFKomsan RodkaewNo ratings yet
- Control System Training - Session 07: PLC ArchitectureDocument25 pagesControl System Training - Session 07: PLC ArchitecturelinkskilNo ratings yet
- JD51单片机sst89e58数据手册Document79 pagesJD51单片机sst89e58数据手册史孟颜No ratings yet
- Pcel4303 Microprocessor & Micro Controllers: MODULE - I (10 Hours)Document35 pagesPcel4303 Microprocessor & Micro Controllers: MODULE - I (10 Hours)sramukNo ratings yet
- Folien Intel NetBurst ArchitectureDocument7 pagesFolien Intel NetBurst ArchitectureHawx GamerNo ratings yet
- MP&MCS Lecture01 May'15Document51 pagesMP&MCS Lecture01 May'15Ch'ng ShufenNo ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- SYIT ES CH 5 & 6 PDFDocument26 pagesSYIT ES CH 5 & 6 PDFtruptiNo ratings yet
- SYIT ES ch3 PDFDocument26 pagesSYIT ES ch3 PDFtruptiNo ratings yet
- Syit Es CH2Document24 pagesSyit Es CH2truptiNo ratings yet
- SYIT ES ch1Document21 pagesSYIT ES ch1truptiNo ratings yet
- Systemantics: How Systems Work and Especially How They Fail by John GallDocument8 pagesSystemantics: How Systems Work and Especially How They Fail by John GallEdsonRigonattiNo ratings yet
- Introduction To Electrical and Computer Engineering: Christopher BattenDocument45 pagesIntroduction To Electrical and Computer Engineering: Christopher BattenanhquanngochoNo ratings yet
- BEMIS SC Bore Erosion Measurement and Inspection System As of 5 AprDocument2 pagesBEMIS SC Bore Erosion Measurement and Inspection System As of 5 AprTYO WIBOWONo ratings yet
- SOFAPP5Document19 pagesSOFAPP5Roxie SilvanoNo ratings yet
- 2018.10.12 RX-RDP 1.4.3 Release NotesDocument17 pages2018.10.12 RX-RDP 1.4.3 Release NotesvladimirNo ratings yet
- 1000+ Microprocessor 8085,8086 MCQDocument164 pages1000+ Microprocessor 8085,8086 MCQSurajAnand48% (29)
- Memory Management 1 PDFDocument42 pagesMemory Management 1 PDFLijo Philip100% (1)
- Optimize Audio in WinDocument39 pagesOptimize Audio in Winian.loydenNo ratings yet
- HPE SimpliVity Rapid DR 3.6.0 Interoperability Guide-A00029769en - UsDocument9 pagesHPE SimpliVity Rapid DR 3.6.0 Interoperability Guide-A00029769en - UsAldo Rafael Gomez GutierrezNo ratings yet
- History Adxtools eDocument10 pagesHistory Adxtools eShirakuNo ratings yet
- Step 5 - Set System ParametersDocument65 pagesStep 5 - Set System ParametersCharbel TadrosNo ratings yet
- Gis & Bim: First Steps To Integrated DataDocument7 pagesGis & Bim: First Steps To Integrated DataCristian Marcos Ramirez CamposNo ratings yet
- Week 1 - Lecture 2 - Basics of C++, Good ProgrammingDocument19 pagesWeek 1 - Lecture 2 - Basics of C++, Good ProgrammingDOHA aqeelNo ratings yet
- MarkviDocument62 pagesMarkviRezaiguia RebaiNo ratings yet
- 2018 Packt - Deep Learning EssentialsDocument271 pages2018 Packt - Deep Learning EssentialsMiguel Angel Pardave BarzolaNo ratings yet
- Blitz-Logs 20230718142125Document22 pagesBlitz-Logs 20230718142125R3 GamingNo ratings yet
- A Virtualisation Case StudyDocument25 pagesA Virtualisation Case StudyKingsley GaiusNo ratings yet
- Lasersystem F-9000 eDocument2 pagesLasersystem F-9000 esmegaNo ratings yet
- CAT Theory NotesDocument15 pagesCAT Theory Notescxhk6tgmybNo ratings yet
- 03 CFD Geom and CFD Ace GuiDocument14 pages03 CFD Geom and CFD Ace GuiLovely JanNo ratings yet
- HDL Verifier™ Getting Started Guide PDFDocument46 pagesHDL Verifier™ Getting Started Guide PDFVictor Colpo NavarreteNo ratings yet
- STAFF - Employee Leave Management System Proposal FinalDocument13 pagesSTAFF - Employee Leave Management System Proposal FinalAb Hamim FarhatNo ratings yet
- User Manual: AI-TECH Video Analytics AppsDocument153 pagesUser Manual: AI-TECH Video Analytics AppsFlorin ȚepârdeaNo ratings yet
- Virtual Personal Assistant Apps DevelopmentDocument4 pagesVirtual Personal Assistant Apps DevelopmentParvez RahamanNo ratings yet
- Jtechphotonics Com P 10204Document34 pagesJtechphotonics Com P 10204David duranNo ratings yet
- How To Install and Import PowerShell Active Directory ModuleDocument8 pagesHow To Install and Import PowerShell Active Directory ModuleAlonsoNo ratings yet