Download as pdf or txt
You might also like
- AWS Module 2 - Cloud Economics and BillingDocument67 pagesAWS Module 2 - Cloud Economics and Billingdsadasdasdas100% (4)
- CS32 Homework 1, Spring 2019 PDFDocument10 pagesCS32 Homework 1, Spring 2019 PDFZachary PuckettNo ratings yet
- 040 X52-62-72 UNIC-flex V1Document63 pages040 X52-62-72 UNIC-flex V1Антон Сорока100% (3)
- Triangle and PWM GeneratorDocument7 pagesTriangle and PWM GeneratorJafar SadiqNo ratings yet
- Chbi502 Chapter 2Document24 pagesChbi502 Chapter 2Chau MaiNo ratings yet
- Best Win 10 Deployment Guide PDFDocument1,387 pagesBest Win 10 Deployment Guide PDFp8lite huawei0% (1)
- PLL-Prob&Sols (9 5 03) PDFDocument46 pagesPLL-Prob&Sols (9 5 03) PDFJavier Postigo CamposNo ratings yet
- Mathcad - Postfilter-Feedback-Halfbridge-Single-Supply-170VDocument6 pagesMathcad - Postfilter-Feedback-Halfbridge-Single-Supply-170Vfarid.mmdNo ratings yet
- University of Hartford - ECE DepartmentDocument10 pagesUniversity of Hartford - ECE DepartmentMaharshiGohelNo ratings yet
- Julao, John Angel - Flexural - Steel 1Document6 pagesJulao, John Angel - Flexural - Steel 1Lavern JohnzenNo ratings yet
- Final04 221 EC2 Resonance CircuitDocument41 pagesFinal04 221 EC2 Resonance CircuitDip GhoshNo ratings yet
- Asumsi Panjang Poros L Gaya Vertikal Cek KekuatanDocument1 pageAsumsi Panjang Poros L Gaya Vertikal Cek KekuatanAli FananiNo ratings yet
- Homework Assignment #3 Graphical Construction Techniques Unit 8.2Document3 pagesHomework Assignment #3 Graphical Construction Techniques Unit 8.2Srinivasarao KavurUNo ratings yet
- Title: Design of Members For Flexure and ShearDocument16 pagesTitle: Design of Members For Flexure and ShearFrancis KoNo ratings yet
- Homebrew RF Siganl Generator Colpitts Fet OscillatorDocument28 pagesHomebrew RF Siganl Generator Colpitts Fet OscillatorHans wernerNo ratings yet
- Transmission Line Zero Seq ReactanceDocument39 pagesTransmission Line Zero Seq ReactanceShyamkant VasekarNo ratings yet
- Amplifiers Frequency Response Examples: Pole-Splitting EquationsDocument7 pagesAmplifiers Frequency Response Examples: Pole-Splitting EquationsDušan KrčumNo ratings yet
- FormulasDocument4 pagesFormulasniro arwin e. bendicioNo ratings yet
- Line Reactance, Zero Sequence Reactance and Mutual Zero Sequence ReactanceDocument39 pagesLine Reactance, Zero Sequence Reactance and Mutual Zero Sequence ReactanceHanh-Trang DangNo ratings yet
- Input LC FiltersDocument14 pagesInput LC FiltersAnshuman MohantyNo ratings yet
- Test 1 Sem 10607 ADocument2 pagesTest 1 Sem 10607 AYang WenNo ratings yet
- Consider An LM324 OpampDocument4 pagesConsider An LM324 Opampusamadar707No ratings yet
- Lifting ClampDocument10 pagesLifting ClampwallachiaNo ratings yet
- Lab 11 - RC and RL FiltersDocument8 pagesLab 11 - RC and RL FiltersTanzim ElahiNo ratings yet
- AIM To Design and Implement An Integrator and Differentiator Using Op-Amp. Tools UsedDocument7 pagesAIM To Design and Implement An Integrator and Differentiator Using Op-Amp. Tools UsedSomesh MuruganNo ratings yet
- ECEG 351 Electronics II Spring 2019Document3 pagesECEG 351 Electronics II Spring 2019KazaValiShaikNo ratings yet
- Files 3-Lesson Notes Lecture 17Document6 pagesFiles 3-Lesson Notes Lecture 17kingboyNo ratings yet
- Low-Pass Butterworth Filter DesignDocument10 pagesLow-Pass Butterworth Filter Designsohagiut50% (2)
- L 19.5697 NH L 19.5697 NH: S-ParametersDocument19 pagesL 19.5697 NH L 19.5697 NH: S-Parametersali.syahputraNo ratings yet
- Input Filter Design For SMPSDocument21 pagesInput Filter Design For SMPSsenkum812002No ratings yet
- Mathcad - Clump Winch AnalysisDocument5 pagesMathcad - Clump Winch AnalysisL. A. WillisNo ratings yet
- Application Note 1004 Understanding Noise Equivalent Power in Radiometric Detectors and InstrumentsDocument7 pagesApplication Note 1004 Understanding Noise Equivalent Power in Radiometric Detectors and InstrumentsaslamziaNo ratings yet
- Chapter - (7) B14-25Document12 pagesChapter - (7) B14-25Kev Geri ZanabriaNo ratings yet
- Design Aids 2 2018 PDFDocument5 pagesDesign Aids 2 2018 PDFOsama Abd ElghanyNo ratings yet
- Vortrag Da Wu LiangjunDocument33 pagesVortrag Da Wu LiangjunsubuhpramonoNo ratings yet
- HomeworkDocument7 pagesHomeworkDoutimiye Tonlagha EddieNo ratings yet
- Lab 7: Amplitude Modulation and Complex Lowpass Signals: ECEN 4652/5002 Communications Lab Spring 2020Document28 pagesLab 7: Amplitude Modulation and Complex Lowpass Signals: ECEN 4652/5002 Communications Lab Spring 2020bushrabatoolNo ratings yet
- Ex - No 2 Integrator and Differentiator Using OpDocument32 pagesEx - No 2 Integrator and Differentiator Using OpBharath kNo ratings yet
- StressDocument15 pagesStresskhaledmegahedNo ratings yet
- Wein Bridge Oscillators PresentationDocument15 pagesWein Bridge Oscillators PresentationHarish KumarNo ratings yet
- (A) Explain The Frequency Response Characteristics and Compensation of Op-AmpDocument52 pages(A) Explain The Frequency Response Characteristics and Compensation of Op-Ampapollo97890No ratings yet
- Timber TableDocument29 pagesTimber Tableye548599No ratings yet
- Problem 3.59 PDFDocument1 pageProblem 3.59 PDFKauê BrittoNo ratings yet
- Rf-Gap Model Presentation: V.A.Moiseev, INR of RAS, Moscow, Russia Moiseev@Document3 pagesRf-Gap Model Presentation: V.A.Moiseev, INR of RAS, Moscow, Russia Moiseev@Khaoula SamaaliNo ratings yet
- Static Logigates 12Document19 pagesStatic Logigates 12api-3750190No ratings yet
- Test 2 - Q2 AnswerDocument1 pageTest 2 - Q2 AnswerFaisal MumtazNo ratings yet
- Ex - No 7 RC Phase Shift and Wien BridgeDocument9 pagesEx - No 7 RC Phase Shift and Wien BridgeBharath kNo ratings yet
- Data Kapal:: Type Container DWT Loa LWL LPP Breadth (B) Depth (H) Draft (T) Speed (VS)Document11 pagesData Kapal:: Type Container DWT Loa LWL LPP Breadth (B) Depth (H) Draft (T) Speed (VS)asrunNo ratings yet
- List of Experiments: Part - A: Design and Implement The Analog Circuits Using Linear IcsDocument26 pagesList of Experiments: Part - A: Design and Implement The Analog Circuits Using Linear IcsVenkatGollaNo ratings yet
- Intro Ducci OnDocument5 pagesIntro Ducci OnIsabel Pij Valenzuela MendozaNo ratings yet
- Typical Radio Receivers Commercial AM: Envelope Detection AM PowerDocument24 pagesTypical Radio Receivers Commercial AM: Envelope Detection AM PowerbalkyderNo ratings yet
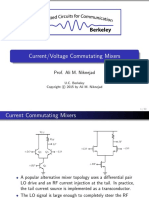
- Lect22 IV MixersDocument50 pagesLect22 IV Mixersbhasin_hemantNo ratings yet
- Hazardous ZonesDocument12 pagesHazardous ZonesIsrael GarciaNo ratings yet
- AC LIC-ManualDocument46 pagesAC LIC-Manualanupamj4uNo ratings yet
- Ind Model D PDFDocument3 pagesInd Model D PDFHerb GassNo ratings yet
- Solution To Microwave Engineering Pozar Chapter 14 Exercise 22 With MATLABDocument4 pagesSolution To Microwave Engineering Pozar Chapter 14 Exercise 22 With MATLABJohn Bofarull GuixNo ratings yet
- Vi. Penyelesaian Tugas 1. Desain Antena A. Desain Elemen 1. Gambar AntenaDocument6 pagesVi. Penyelesaian Tugas 1. Desain Antena A. Desain Elemen 1. Gambar AntenaDeliantiNo ratings yet
- EC2272 Formulario 3Document1 pageEC2272 Formulario 3AngelNo ratings yet
- Ind Model CalcDocument2 pagesInd Model CalcHerb GassNo ratings yet
- Ee4501f18 HW 5Document4 pagesEe4501f18 HW 5al-muntheral-mairikiNo ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Inertia FormulasDocument11 pagesInertia FormulasHerb GassNo ratings yet
- Ind Model XXD PDFDocument3 pagesInd Model XXD PDFHerb GassNo ratings yet
- Ind Res Other CalcsDocument1 pageInd Res Other CalcsHerb GassNo ratings yet
- Ind Model D PDFDocument3 pagesInd Model D PDFHerb GassNo ratings yet
- Ind Model CalcDocument2 pagesInd Model CalcHerb GassNo ratings yet
- Shanay Parikh and Keith Rivera - Monday 26th October PDFDocument5 pagesShanay Parikh and Keith Rivera - Monday 26th October PDFShanay ParikhNo ratings yet
- Barangay Resident Information Management With Issuance System.Document13 pagesBarangay Resident Information Management With Issuance System.Jessa MantacNo ratings yet
- TASK1Document14 pagesTASK1Marvin CincoNo ratings yet
- Lenovo SL300 SL400 - ASUS ROCKY30 DDR2 UMA - REV 1.0sec PDFDocument94 pagesLenovo SL300 SL400 - ASUS ROCKY30 DDR2 UMA - REV 1.0sec PDFCiprianIfrimNo ratings yet
- MirroringDocument3 pagesMirroringabdul moizNo ratings yet
- OpenText AppWorks Platform 22.4 Release NotesDocument14 pagesOpenText AppWorks Platform 22.4 Release NotesSumit GuptaNo ratings yet
- 9 15 13 Phase-Locked Loop Tutorial PLL PDFDocument12 pages9 15 13 Phase-Locked Loop Tutorial PLL PDFSummer KoNo ratings yet
- Availability and Fade Margin Calculations For 5G MDocument22 pagesAvailability and Fade Margin Calculations For 5G Mili ilievNo ratings yet
- Ax2012 Enus Imp 05 PDFDocument40 pagesAx2012 Enus Imp 05 PDFminardmiNo ratings yet
- Custome Raspberry Pi ImageDocument4 pagesCustome Raspberry Pi ImagegejibNo ratings yet
- Compal Cy25Document175 pagesCompal Cy25Jozsef JuskaNo ratings yet
- VTSP Vsphere Product OverviewDocument3 pagesVTSP Vsphere Product OverviewJimNo ratings yet
- Simple Op Amp Measurements: by James M. BryantDocument3 pagesSimple Op Amp Measurements: by James M. BryantFer TgNo ratings yet
- Bus Reservation System Slides PDFDocument25 pagesBus Reservation System Slides PDFUmâir Khan0% (1)
- Step by Step Installation of Oracle Apps R12Document13 pagesStep by Step Installation of Oracle Apps R12khiljisNo ratings yet
- Basic Summary of X-Ray Equipment - Naver BlogDocument7 pagesBasic Summary of X-Ray Equipment - Naver BlogMalikAlrahabiNo ratings yet
- TDS Profile Catalog TDSDocument28 pagesTDS Profile Catalog TDSวิระศักดิ์ วัตถุNo ratings yet
- Huawei Bts 3900 Series ConfigurationDocument5 pagesHuawei Bts 3900 Series ConfigurationminoothwinNo ratings yet
- Install Oracle Enterprise ManagerDocument15 pagesInstall Oracle Enterprise ManagerJENIFA JEYAKUMAR100% (1)
- CCBoot Internet Cafe SolutionDocument25 pagesCCBoot Internet Cafe Solutionhuracanrojo94No ratings yet
- MOTOPLUS SDK-Install166241-1CDDocument55 pagesMOTOPLUS SDK-Install166241-1CDMihail AvramovNo ratings yet
- Esecos LogDocument2 pagesEsecos LogNiumar SpinolaNo ratings yet
- WolphilinkmanualDocument3 pagesWolphilinkmanualJosé Jaime Herrera CortésNo ratings yet
- WK 01Document328 pagesWK 01Gaye VillapandoNo ratings yet
- SoC Module Desc2013Document57 pagesSoC Module Desc2013AndyNo ratings yet
- Command Reference: Optima/Econo DMC-2xxx SeriesDocument263 pagesCommand Reference: Optima/Econo DMC-2xxx SeriesAnimesh GhoshNo ratings yet