Download as pdf or txt
You might also like
- Homework For Module 5 : Quiz, 19 QuestionsDocument13 pagesHomework For Module 5 : Quiz, 19 QuestionsJustin Jose P33% (3)
- Functional Specification Export Gas Compressor PDFDocument7 pagesFunctional Specification Export Gas Compressor PDFdndudcNo ratings yet
- Basic Design of A Fluidized Bed Reactor For Wastewater Treatment Using Fenton OxidationDocument6 pagesBasic Design of A Fluidized Bed Reactor For Wastewater Treatment Using Fenton Oxidationsebzelimakarna100% (1)
- ELEC221 HW04 Winter2023-1Document16 pagesELEC221 HW04 Winter2023-1Isha ShuklaNo ratings yet
- A Simple Yet Efficient Two Step Fifth Order Weighted Newton Method For Nonlinear ModelsDocument23 pagesA Simple Yet Efficient Two Step Fifth Order Weighted Newton Method For Nonlinear ModelsAntmel Rodriguez CabralNo ratings yet
- Artigo 2 Convexity Issues in System IdentificationDocument9 pagesArtigo 2 Convexity Issues in System IdentificationclaudyaneNo ratings yet
- Process Control Course 1Document82 pagesProcess Control Course 1Deuel De LisleNo ratings yet
- Tutorial On Control Theory: Stefan Simrock, ITERDocument95 pagesTutorial On Control Theory: Stefan Simrock, ITERAleksandar KošaracNo ratings yet
- Elec2146 L9 RK V03 PDFDocument24 pagesElec2146 L9 RK V03 PDFvince kafuaNo ratings yet
- Automatic Control III Homework Assignment 3 2015Document4 pagesAutomatic Control III Homework Assignment 3 2015salimNo ratings yet
- Lec13 PDFDocument7 pagesLec13 PDFanilNo ratings yet
- TP Sys2Document24 pagesTP Sys2Draw SmailNo ratings yet
- Exam in Automatic Control II Reglerteknik II 5hp: Good Luck!Document10 pagesExam in Automatic Control II Reglerteknik II 5hp: Good Luck!Armando MaloneNo ratings yet
- 1 - Transfer Functions LinearizationDocument13 pages1 - Transfer Functions Linearizationedo marNo ratings yet
- Common Fourier Transforms Questions and Answers - SanfoundryDocument11 pagesCommon Fourier Transforms Questions and Answers - SanfoundrykshambelmekuyeNo ratings yet
- HW1Document11 pagesHW1Tao Liu YuNo ratings yet
- Problem Set No. 6: Sabancı University Faculty of Engineering and Natural Sciences Ens 211 - SignalsDocument6 pagesProblem Set No. 6: Sabancı University Faculty of Engineering and Natural Sciences Ens 211 - SignalsGarip KontNo ratings yet
- Unit Ii-1Document24 pagesUnit Ii-1dr.omprakash.itNo ratings yet
- Sol 1Document4 pagesSol 1anılNo ratings yet
- Math Transform Methods: Dr. P Adraig KirwanDocument57 pagesMath Transform Methods: Dr. P Adraig KirwanXavimVXSNo ratings yet
- SNS (Tae-02, A-59) PDFDocument20 pagesSNS (Tae-02, A-59) PDFPrajwal vishnuji choudhariNo ratings yet
- Cayley Hamilton Theorem Example PDFDocument7 pagesCayley Hamilton Theorem Example PDFNaman GaurNo ratings yet
- 04 ARIMA ModelsDocument45 pages04 ARIMA ModelsCristian MoretaNo ratings yet
- Process Dynamic Control QuestionDocument2 pagesProcess Dynamic Control QuestionRam chandraNo ratings yet
- Finalexam 2013Document5 pagesFinalexam 2013RezaNo ratings yet
- Fourier Transform (For Non-Periodic Signals)Document27 pagesFourier Transform (For Non-Periodic Signals)hamza abdo mohamoudNo ratings yet
- Unesco/Ansti Econtent Development Programme: Mathematical Methods For Scientists and EngineersDocument23 pagesUnesco/Ansti Econtent Development Programme: Mathematical Methods For Scientists and Engineerstinotenda nziramasangaNo ratings yet
- CTFT DTFT BonusDocument9 pagesCTFT DTFT BonusAmreshAmanNo ratings yet
- N N N N Y: Signals & Systems Questions Set 01Document13 pagesN N N N Y: Signals & Systems Questions Set 01Sachin Singh NegiNo ratings yet
- Algorithms and Data Structures: Dynamic Programming Matrix-Chain MultiplicationDocument17 pagesAlgorithms and Data Structures: Dynamic Programming Matrix-Chain MultiplicationnehruNo ratings yet
- Ma Kai-Kuang (Tutorial+Lectures)Document157 pagesMa Kai-Kuang (Tutorial+Lectures)Ang KhengNo ratings yet
- CompFin 2020 SS QF Sheet 11Document3 pagesCompFin 2020 SS QF Sheet 117 RODYNo ratings yet
- BEE-C413: B. Tech. Semester Iv Examination, 2021Document3 pagesBEE-C413: B. Tech. Semester Iv Examination, 2021NamanNo ratings yet
- MODULE 3 FeedbackDocument20 pagesMODULE 3 FeedbackJames CerbitoNo ratings yet
- Signals and Systems QuestionsDocument16 pagesSignals and Systems QuestionsVishal KumarNo ratings yet
- PHYS 381 W23 Assignment 4Document8 pagesPHYS 381 W23 Assignment 4Nathan NgoNo ratings yet
- Time Response of Systems: 10.1 Some Standard Time ResponsesDocument8 pagesTime Response of Systems: 10.1 Some Standard Time ResponseskiranNo ratings yet
- Home My Test My Profile: Solution Report ForDocument13 pagesHome My Test My Profile: Solution Report ForKirti GuptaNo ratings yet
- PO SS2011 05.1 DynamicOptimization p11Document11 pagesPO SS2011 05.1 DynamicOptimization p11Everton CollingNo ratings yet
- Dorcak Petras 2007 PDFDocument7 pagesDorcak Petras 2007 PDFVignesh RamakrishnanNo ratings yet
- 3510 A7 s11Document2 pages3510 A7 s11Savannah CooksonNo ratings yet
- Windkessel ProblemsDocument41 pagesWindkessel Problemsadh30No ratings yet
- Signals and System MATLAB CodeDocument7 pagesSignals and System MATLAB CodeAbhinav ChoudharyNo ratings yet
- LTIDocument67 pagesLTIElectron FlowNo ratings yet
- Ece 3084 Su 14 HW 04Document5 pagesEce 3084 Su 14 HW 04Jay Mehta0% (1)
- Solving Dynare Eui2014 PDFDocument84 pagesSolving Dynare Eui2014 PDFduc anhNo ratings yet
- Numerical Methods For CSE Problem Sheet 4: Problem 1. Order of Convergence From Error Recursion (Core Prob-Lem)Document14 pagesNumerical Methods For CSE Problem Sheet 4: Problem 1. Order of Convergence From Error Recursion (Core Prob-Lem)DANIEL ALEJANDRO VARGAS UZURIAGANo ratings yet
- FinaldspDocument13 pagesFinaldspbedominator34No ratings yet
- MMS 05 Computational MethodsDocument52 pagesMMS 05 Computational MethodsSai pavan kumar reddy YeddulaNo ratings yet
- Econ 512 Box Jenkins SlidesDocument31 pagesEcon 512 Box Jenkins SlidesMithilesh KumarNo ratings yet
- ECE 410 Digital Signal Processing D. Munson University of IllinoisDocument18 pagesECE 410 Digital Signal Processing D. Munson University of IllinoisFreddy PesantezNo ratings yet
- M2an 1977 11 1 93 0Document16 pagesM2an 1977 11 1 93 0Zina SawafNo ratings yet
- Assignment Ex04Document3 pagesAssignment Ex04Melbin SibyNo ratings yet
- Notes On Phasors: 1.1 Time-Harmonic Physical QuantitiesDocument11 pagesNotes On Phasors: 1.1 Time-Harmonic Physical QuantitiesonezimocardosoNo ratings yet
- Signals and Systems - CMP 271 Homework 7: Must NOTDocument2 pagesSignals and Systems - CMP 271 Homework 7: Must NOTsaad aliNo ratings yet
- ECE216H1 2022 SolutionDocument4 pagesECE216H1 2022 SolutionhcxNo ratings yet
- Unit 3 Common Fourier Transforms Questions and Answers - Sanfoundry PDFDocument8 pagesUnit 3 Common Fourier Transforms Questions and Answers - Sanfoundry PDFzohaibNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Mathematics ReminderDocument16 pagesMathematics Reminderpepe sanchezNo ratings yet
- P2-Proposed Problems - Fluid StaticsDocument3 pagesP2-Proposed Problems - Fluid Staticspepe sanchezNo ratings yet
- Ejercicios HTTPDocument2 pagesEjercicios HTTPpepe sanchezNo ratings yet
- Chapter 1Document74 pagesChapter 1pepe sanchezNo ratings yet
- S2 - Solved Problems - Fluid StaticsDocument7 pagesS2 - Solved Problems - Fluid Staticspepe sanchezNo ratings yet
- CPC L10 LQRDocument11 pagesCPC L10 LQRpepe sanchezNo ratings yet
- Tema 6Document12 pagesTema 6pepe sanchezNo ratings yet
- CPC L9 PSDocument9 pagesCPC L9 PSpepe sanchezNo ratings yet
- MPC Intro PDFDocument56 pagesMPC Intro PDFpepe sanchezNo ratings yet
- MPC Constrained PDFDocument6 pagesMPC Constrained PDFpepe sanchezNo ratings yet
- CPC L11 LQG PDFDocument10 pagesCPC L11 LQG PDFpepe sanchezNo ratings yet
- Performance - Ojo - of A Stationary Savonius Rotor With Circular ArcDocument5 pagesPerformance - Ojo - of A Stationary Savonius Rotor With Circular Arcgustavo rodriguezNo ratings yet
- Week2 - CE211 - Topic 2c - TapingDocument39 pagesWeek2 - CE211 - Topic 2c - TapingPrances CloribelNo ratings yet
- Geotechnical Engineering 5Document1 pageGeotechnical Engineering 5YeddaMIlaganNo ratings yet
- Evaluation of Surge-Transferred Overvoltages in Distribution TransformersDocument9 pagesEvaluation of Surge-Transferred Overvoltages in Distribution TransformersdankorankoNo ratings yet
- Lecture 1 Robust and Optimal ControlDocument7 pagesLecture 1 Robust and Optimal ControlRoger BertranNo ratings yet
- Esas Preboard ObjectivesDocument7 pagesEsas Preboard ObjectivesRandy RandyNo ratings yet
- NYJC H2 2021 Prelim P1Document5 pagesNYJC H2 2021 Prelim P1sunguar.sanjayNo ratings yet
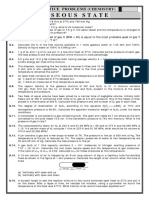
- Cpp-Gaseous State - RGVDocument2 pagesCpp-Gaseous State - RGVGauri KabraNo ratings yet
- Second Law of Thermodynamics - WikipediaDocument131 pagesSecond Law of Thermodynamics - WikipediaPallab ChakrabortyNo ratings yet
- Parametric Optimization of Ferrite Structure UsedDocument14 pagesParametric Optimization of Ferrite Structure UsedTarik BouchalaNo ratings yet
- Elastic Potential Energy: English For PhysicsDocument2 pagesElastic Potential Energy: English For Physicshaura 30anNo ratings yet
- Granta EduPack Release NotesDocument8 pagesGranta EduPack Release Notes3220355No ratings yet
- Heatless Desiccant Compressed Air Dryer: Models Tw10 - Tw55Document20 pagesHeatless Desiccant Compressed Air Dryer: Models Tw10 - Tw55Freddy ChecaNo ratings yet
- UT & PAUT Scan Plan For Branch ConnectionDocument2 pagesUT & PAUT Scan Plan For Branch ConnectionsnndhkNo ratings yet
- ECAT Past Papers (Mathematics Portion) PDFDocument16 pagesECAT Past Papers (Mathematics Portion) PDFtanoligNo ratings yet
- Plate No. 2 Lessons 1 To 5Document3 pagesPlate No. 2 Lessons 1 To 5Sofia Bianca Zerrudo LobosNo ratings yet
- Chapter #6: Bipolar Junction: TransistorsDocument61 pagesChapter #6: Bipolar Junction: TransistorsXolelwa GaselaNo ratings yet
- Digital Microwave Communication PrinciplesDocument113 pagesDigital Microwave Communication PrinciplesMohamed Maged ElgisrNo ratings yet
- Conductor Parameters-SI UnitsDocument17 pagesConductor Parameters-SI UnitsMunesu Innocent Dizamuhupe0% (1)
- API-650 Preguntas y Respuestas ImpresoDocument49 pagesAPI-650 Preguntas y Respuestas ImpresoJuan Bedolla FloresNo ratings yet
- Cross-Sectional Deformation of H96 Brass Double-Ridged Rectangular Tube in Rotary Draw Bending Process With Different Yield CriteriaDocument11 pagesCross-Sectional Deformation of H96 Brass Double-Ridged Rectangular Tube in Rotary Draw Bending Process With Different Yield CriteriaYasser BouktirNo ratings yet
- Geotechnical InvestigationsDocument85 pagesGeotechnical InvestigationsAmpumuza MmukundaNo ratings yet
- Kollmorgen AKM - ServomotorDocument44 pagesKollmorgen AKM - ServomotorMiguel GonzalezNo ratings yet
- Oliver Heaviside Physical MathematicianDocument7 pagesOliver Heaviside Physical MathematicianAKHI9No ratings yet
- Velocity Acceleration Analysis of MechanismsDocument16 pagesVelocity Acceleration Analysis of Mechanismsकरळे सुरजNo ratings yet
- Catalogue ESCOGEAR F Series - 09-23Document64 pagesCatalogue ESCOGEAR F Series - 09-23meftoutkhelafNo ratings yet
- Government of India Ministry of Power Central Electricity Authority New DelhiDocument52 pagesGovernment of India Ministry of Power Central Electricity Authority New DelhiVikrant DeshmukhNo ratings yet
- Module 5 Superposition, Thevenin's and Norton's Analysis MethodDocument73 pagesModule 5 Superposition, Thevenin's and Norton's Analysis MethodJose Miguel JimenezNo ratings yet