Download as pdf or txt
You might also like
- Old Oregon Wood Store Case Analysis: or Group 11: Sravan Barbie Vignesh Rittik Mihira Shruti GotarkarDocument20 pagesOld Oregon Wood Store Case Analysis: or Group 11: Sravan Barbie Vignesh Rittik Mihira Shruti GotarkarBarbie JainNo ratings yet
- Introduction To Data Mining Using OrangeDocument72 pagesIntroduction To Data Mining Using OrangeMighty SinghNo ratings yet
- Curves Bezier CADDocument47 pagesCurves Bezier CADVenkatesh Sathya HarisyamNo ratings yet
- DFC10103 Dis2019 Pbe03Document9 pagesDFC10103 Dis2019 Pbe03Haziqhv GamingNo ratings yet
- Simulasi CPU SchedulingDocument7 pagesSimulasi CPU SchedulingRa DoNo ratings yet
- M 2 1 2 M 2 1 2 GM - Analytic - Curves 300120241134Document45 pagesM 2 1 2 M 2 1 2 GM - Analytic - Curves 300120241134Prince KumarNo ratings yet
- CSCI 8080 Design and Analysis of Algorithms: Greedy AlgorithmDocument4 pagesCSCI 8080 Design and Analysis of Algorithms: Greedy AlgorithmashwathyashokanNo ratings yet
- MAK 536E Midterm 2012+Document4 pagesMAK 536E Midterm 2012+Cemre YavuzNo ratings yet
- Bezier 6PDocument6 pagesBezier 6PSharon kaur katyalNo ratings yet
- Bezier Curve 1 PDFDocument4 pagesBezier Curve 1 PDFAnsuman MahantyNo ratings yet
- L12 Cubic SplineDocument15 pagesL12 Cubic SplinemannuvpatelNo ratings yet
- Different Approaches of Approximating A Cycloid Using Bezier Curves-FINALDocument30 pagesDifferent Approaches of Approximating A Cycloid Using Bezier Curves-FINALHarsh ShrivNo ratings yet
- Exercises7 SolDocument2 pagesExercises7 SolSichzeugNo ratings yet
- Linear Array: Jyotika JainDocument22 pagesLinear Array: Jyotika JainSurendra Singh KushwahNo ratings yet
- M2-1-2-Parametric Geom Model Analytic CurvesDocument38 pagesM2-1-2-Parametric Geom Model Analytic CurvesNANDULA GOUTHAM SAINo ratings yet
- Bezier Curve and Its Application: Dušan Páleš, Jozef RédlDocument7 pagesBezier Curve and Its Application: Dušan Páleš, Jozef Rédlrohit mittalNo ratings yet
- Affine Barycentric and ConvexDocument8 pagesAffine Barycentric and ConvexAbhinav ApurvaNo ratings yet
- Parametric CurveDocument28 pagesParametric Curveavi200894No ratings yet
- Equation PlaneDocument2 pagesEquation PlaneZHY HUNo ratings yet
- Finding The Equation of A Plane: A (X-X) +B (Y-Y) +C (Z-Z) 0Document2 pagesFinding The Equation of A Plane: A (X-X) +B (Y-Y) +C (Z-Z) 0BJERNo ratings yet
- The Handbook of Formulas and Tables For Signal ProcessingDocument13 pagesThe Handbook of Formulas and Tables For Signal ProcessingAmod ShankerNo ratings yet
- 3computer Numerical Control LEC 3Document28 pages3computer Numerical Control LEC 3regassa rajiNo ratings yet
- DATE: 31-12-2017: Hints & SolutionsDocument18 pagesDATE: 31-12-2017: Hints & SolutionsSubbu SarabuNo ratings yet
- Brocard S ConjectureDocument5 pagesBrocard S ConjectureemilioNo ratings yet
- Using Python CompEcon EnglishDocument25 pagesUsing Python CompEcon Englisharkapravo palNo ratings yet
- (Clipping Eksplisit 2D) : Soal IDocument5 pages(Clipping Eksplisit 2D) : Soal Ipranatha31071990No ratings yet
- Graphics Tutorial Solution 02Document1 pageGraphics Tutorial Solution 02seventhhemanthNo ratings yet
- Bezier Curves and SurfacesDocument10 pagesBezier Curves and SurfacesAniruddho RayNo ratings yet
- SOLUTIONS TUTORIALS ASSIGNMENT 6 2023 24 Sem II 14022023Document1 pageSOLUTIONS TUTORIALS ASSIGNMENT 6 2023 24 Sem II 14022023f20212419No ratings yet
- 11 Salsabila 2210312120044Document47 pages11 Salsabila 2210312120044Salsa BilaNo ratings yet
- Round RobinDocument6 pagesRound Robinanuradha RoyNo ratings yet
- Example 1Document11 pagesExample 1Dr. Maqsood Ahmed KhanNo ratings yet
- Tugas Rutin 2Document6 pagesTugas Rutin 2DindaNo ratings yet
- Hardware and Software InterpolatorDocument78 pagesHardware and Software Interpolatorngthanhtam20000No ratings yet
- Steiner Ratio PaperDocument16 pagesSteiner Ratio PaperDan IsmailescuNo ratings yet
- Practical No 1 Cive 416 1.9.2022 Final - Studentsand Technicians FDocument4 pagesPractical No 1 Cive 416 1.9.2022 Final - Studentsand Technicians FCOLLEN KGAODINo ratings yet
- Topic Three Solution To Homework Exercise: Lassic Odels OF LigopolyDocument11 pagesTopic Three Solution To Homework Exercise: Lassic Odels OF LigopolyashNo ratings yet
- CG QnaDocument13 pagesCG QnaabcNo ratings yet
- FinalExam SolutionDocument11 pagesFinalExam SolutionpranavjibhakateNo ratings yet
- Correlator Receiver - Probability of Error - Line CodingDocument7 pagesCorrelator Receiver - Probability of Error - Line Codingmeriam keriakosNo ratings yet
- Cubic SplineDocument40 pagesCubic SplineAgam SaxenaNo ratings yet
- 2.6 M Uller's Method: Chapter 2. Solutions of Equations of One VariableDocument9 pages2.6 M Uller's Method: Chapter 2. Solutions of Equations of One VariableXyzNo ratings yet
- W5 Ps Fourier Acoustic 2dDocument7 pagesW5 Ps Fourier Acoustic 2dvitucho92No ratings yet
- M 2 1 2 Parametric Geom Model Analytic CurvesDocument39 pagesM 2 1 2 Parametric Geom Model Analytic CurvesAbhinav KumarNo ratings yet
- Fast Fourier Transform On HexagonsDocument7 pagesFast Fourier Transform On HexagonsYufangNo ratings yet
- Derivatives of Rational B Ezier CurvesDocument16 pagesDerivatives of Rational B Ezier Curvestomica06031969No ratings yet
- Using Matlab in Robotic Kinematics: Assoc. Prof, Nguyen Truong Thinh Department of Mechatronics - HCMUTEDocument19 pagesUsing Matlab in Robotic Kinematics: Assoc. Prof, Nguyen Truong Thinh Department of Mechatronics - HCMUTETrương Việt HoàngNo ratings yet
- Bsplines UniDocument3 pagesBsplines Uninitimishra111No ratings yet
- DM 15 2018Document2 pagesDM 15 2018seb.bussonNo ratings yet
- Erwin Kreyszig - Advanced Engineering Mathematics 10th Edition (Chapter 14) AnswersDocument1 pageErwin Kreyszig - Advanced Engineering Mathematics 10th Edition (Chapter 14) AnswersShah RiyanNo ratings yet
- Compute FFT Twiddle FactorsDocument4 pagesCompute FFT Twiddle FactorsNagabhooshan HegdeNo ratings yet
- Splines & QuaternionsDocument12 pagesSplines & Quaternionszhaodong.liangNo ratings yet
- 1 Org LogDocument60 pages1 Org LogBassel SafwatNo ratings yet
- Digital Circuits and Logic Design: Lecture4-3Document17 pagesDigital Circuits and Logic Design: Lecture4-3ramanaidu1No ratings yet
- MAK 536E Advanced Computer Aided Design: 1. (10) Write Down The List of Hardcopy Device TechnologiesDocument6 pagesMAK 536E Advanced Computer Aided Design: 1. (10) Write Down The List of Hardcopy Device TechnologiesAbdulmuttalip ÇekliNo ratings yet
- سوال 25Document12 pagesسوال 25alijasipoNo ratings yet
- JEE Main 2023 6 April Shift 2Document39 pagesJEE Main 2023 6 April Shift 2Madhu RathNo ratings yet
- Case Study-Question-3Document2 pagesCase Study-Question-3EliaNo ratings yet
- OS LAB Task 1Document36 pagesOS LAB Task 1maxproooooo9No ratings yet
- CSC 2405 - CPU Scheduling Exercises: Exercise 1 (Predicting Lengths of CPU Bursts)Document8 pagesCSC 2405 - CPU Scheduling Exercises: Exercise 1 (Predicting Lengths of CPU Bursts)Yacine MoussaouiNo ratings yet
- Single Workstation Factory Models: (A) (B) P (C) W IP 2.437 (D) E (# Lost Jobs) 35.64/day (E) TH 3.513/hr (F) CTDocument6 pagesSingle Workstation Factory Models: (A) (B) P (C) W IP 2.437 (D) E (# Lost Jobs) 35.64/day (E) TH 3.513/hr (F) CTandres lara laraNo ratings yet
- Application of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsFrom EverandApplication of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Textbook PDFDocument846 pagesTextbook PDFDarsh MenonNo ratings yet
- Intro To Dev Studies NotesDocument78 pagesIntro To Dev Studies NotesDarsh MenonNo ratings yet
- VC Solutions PDFDocument1,112 pagesVC Solutions PDFDarsh MenonNo ratings yet
- Cad TextDocument846 pagesCad TextDarsh MenonNo ratings yet
- L7 PDFDocument37 pagesL7 PDFDarsh MenonNo ratings yet
- L2 PDFDocument29 pagesL2 PDFDarsh MenonNo ratings yet
- L1 PDFDocument52 pagesL1 PDFDarsh MenonNo ratings yet
- L1 MergedDocument247 pagesL1 MergedDarsh MenonNo ratings yet
- L3 PDFDocument26 pagesL3 PDFDarsh MenonNo ratings yet
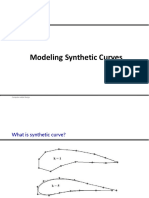
- Modeling Synthetic Curves: Computer-Aided DesignDocument31 pagesModeling Synthetic Curves: Computer-Aided DesignDarsh MenonNo ratings yet
- L4 PDFDocument38 pagesL4 PDFDarsh MenonNo ratings yet
- VC Merge PDFDocument530 pagesVC Merge PDFDarsh MenonNo ratings yet
- Opti Merge PDFDocument289 pagesOpti Merge PDFDarsh MenonNo ratings yet
- Ilovepdf Merged PDFDocument8 pagesIlovepdf Merged PDFDarsh MenonNo ratings yet
- Quiz-1 Question Paper PDFDocument2 pagesQuiz-1 Question Paper PDFDarsh MenonNo ratings yet
- Tutorial Problems Powerplant PDFDocument2 pagesTutorial Problems Powerplant PDFDarsh MenonNo ratings yet
- Tilak Slides PDFDocument72 pagesTilak Slides PDFDarsh MenonNo ratings yet
- Ppemerge PDFDocument1,132 pagesPpemerge PDFDarsh MenonNo ratings yet
- Tilak Slides PDFDocument72 pagesTilak Slides PDFDarsh MenonNo ratings yet
- Pressure Vessels: DARSH MENON 2020A4PS0771GDocument5 pagesPressure Vessels: DARSH MENON 2020A4PS0771GDarsh MenonNo ratings yet
- Hydraulic Pumps Lec NotesDocument30 pagesHydraulic Pumps Lec NotesDarsh Menon100% (1)
- Steam TableDocument9 pagesSteam TableDarsh MenonNo ratings yet
- Question QuizDocument33 pagesQuestion QuizDarsh MenonNo ratings yet
- VC Test 1Document2 pagesVC Test 1Darsh MenonNo ratings yet
- PPE Midsem 17-18 PDFDocument2 pagesPPE Midsem 17-18 PDFDarsh MenonNo ratings yet
- PPE Midsem 17-18 PDFDocument2 pagesPPE Midsem 17-18 PDFDarsh MenonNo ratings yet
- Quiz 1 PDFDocument1 pageQuiz 1 PDFDarsh MenonNo ratings yet
- Q1 PDFDocument4 pagesQ1 PDFDarsh MenonNo ratings yet
- Quiz-1 Solution PDFDocument1 pageQuiz-1 Solution PDFDarsh MenonNo ratings yet
- Ppe Stream1Document22 pagesPpe Stream1Darsh MenonNo ratings yet
- Answer: C: Presentation of DataDocument4 pagesAnswer: C: Presentation of DataambiliNo ratings yet
- Employee Salary Prediction SlidesDocument21 pagesEmployee Salary Prediction SlidesrushipanchalNo ratings yet
- Cat2vec Learning Distributed Representation of Multi Field Categorical DataDocument9 pagesCat2vec Learning Distributed Representation of Multi Field Categorical DataManikanta SreekakulaNo ratings yet
- The Programmers Guide To TheoryDocument214 pagesThe Programmers Guide To Theory3chelonNo ratings yet
- Question Paper - CIMDocument2 pagesQuestion Paper - CIMHariNo ratings yet
- 4 MCQ Ann Ann Quiz SelectedDocument18 pages4 MCQ Ann Ann Quiz SelectedĐồng DươngNo ratings yet
- CH1Document33 pagesCH1Ahmad ZikriNo ratings yet
- Assignment 3 Quality Core Tool 2Document9 pagesAssignment 3 Quality Core Tool 2lovepreetsk0465No ratings yet
- 1 - ML Introduction1Document23 pages1 - ML Introduction1Hriday ShettyNo ratings yet
- Lab No 3Document27 pagesLab No 3Ali MohsinNo ratings yet
- Theory of Automata and Formal Languages Ecs403Document3 pagesTheory of Automata and Formal Languages Ecs403compiler&automataNo ratings yet
- Neural Network Time SeriesDocument42 pagesNeural Network Time SeriesboynaduaNo ratings yet
- Excel Solver Sensitivity AnalysisDocument47 pagesExcel Solver Sensitivity AnalysisJishnu Chakraborty50% (2)
- 1983 Wood Gust FactorDocument3 pages1983 Wood Gust FactorAlejandro López LlanusaNo ratings yet
- Red Bin Analysis PDF Notes - 10020477 - 2023 - 10 - 13 - 09 - 28Document7 pagesRed Bin Analysis PDF Notes - 10020477 - 2023 - 10 - 13 - 09 - 28Sameer SutarNo ratings yet
- Mini Project Report On Heart Disease PreDocument23 pagesMini Project Report On Heart Disease PregayuNo ratings yet
- Assignment - DCA1103 - BCA - 1 - Set 1and2 - March2022uDocument2 pagesAssignment - DCA1103 - BCA - 1 - Set 1and2 - March2022uGagan KumarNo ratings yet
- II - Illustrative Example Blending ProcessDocument6 pagesII - Illustrative Example Blending ProcessIshita BhattacharyyaNo ratings yet
- Amsterdam Petroleum Geoscience: Seismic InversionDocument2 pagesAmsterdam Petroleum Geoscience: Seismic InversionsolomonNo ratings yet
- SKR Engineering College Department of Electronics and Communication Engineering Internal Test - 1 Ap7202 - Asic and Fpga DesignDocument1 pageSKR Engineering College Department of Electronics and Communication Engineering Internal Test - 1 Ap7202 - Asic and Fpga DesignSuresh CgandarNo ratings yet
- Sakshi ThermodynamicsDocument16 pagesSakshi Thermodynamicssakshi aroraNo ratings yet
- Matlab Course BrochureDocument8 pagesMatlab Course Brochuresakshi_singh_25No ratings yet
- Four Page PDFDocument4 pagesFour Page PDFabhishekNo ratings yet
- Chapter5 Calculus of VariationsDocument30 pagesChapter5 Calculus of VariationsRaja RamachandranNo ratings yet
- Predictive Modelling ProjectDocument29 pagesPredictive Modelling ProjectPranjal SinghNo ratings yet
- Fake News Detection by Using Machine LearningDocument50 pagesFake News Detection by Using Machine LearningSameer KumarNo ratings yet
- DSP Examen p1 2013Document2 pagesDSP Examen p1 2013i.am.amitNo ratings yet
- Logic AssignmentDocument4 pagesLogic AssignmentYeshiwas KefaleNo ratings yet