Download as pdf or txt
You might also like
- Unitat 7 Electropneum TicaDocument21 pagesUnitat 7 Electropneum Ticalluís llevatNo ratings yet
- Unitat 4 Electropneum TicaDocument25 pagesUnitat 4 Electropneum TicaPROF - David LaparraNo ratings yet
- Unitat 4 ElectropneumaticaDocument17 pagesUnitat 4 ElectropneumaticaSergio KastNo ratings yet
- Unitat 3Document26 pagesUnitat 3Sergio KastNo ratings yet
- Unitat 2Document14 pagesUnitat 2Sergio KastNo ratings yet
- Unitat 1 Electropneum TicaDocument7 pagesUnitat 1 Electropneum TicaMarc GordoNo ratings yet
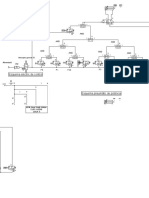
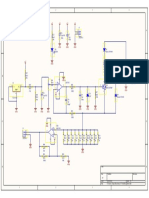
- Esquema Micro - FuenteDocument1 pageEsquema Micro - FuenteLuis OrtegaNo ratings yet
- Pràctica 6 (Pneumàtica) - Duarte Alcázar ArnauDocument1 pagePràctica 6 (Pneumàtica) - Duarte Alcázar ArnauArnau Duarte AlcazarNo ratings yet
- RD-M960 RD-M960: SHIMANO XTR Rear DerailleurDocument1 pageRD-M960 RD-M960: SHIMANO XTR Rear DerailleurJonah HexNo ratings yet
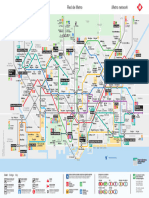
- Plànol Xarxa de MetroDocument1 pagePlànol Xarxa de Metroqkdx.rsrek87No ratings yet
- 000-001-003-Ensamble Extrusor-Rev-BDocument1 page000-001-003-Ensamble Extrusor-Rev-BRichardNo ratings yet
- Esquema LantronixDocument1 pageEsquema Lantronixtimoteo garroNo ratings yet
- Practica 5B Duarte Alcázar ArnauDocument4 pagesPractica 5B Duarte Alcázar ArnauArnau Duarte AlcazarNo ratings yet
- T8a SENAI PDRFEDocument1 pageT8a SENAI PDRFEmbornelliNo ratings yet
- 3 ASTRA HD9 MY 2016 E3 ESP Vol 5 A3Document70 pages3 ASTRA HD9 MY 2016 E3 ESP Vol 5 A3Maykel CruzNo ratings yet
- Iso A-7Document1 pageIso A-7Valeria BravoNo ratings yet
- OVALO HUANCHACO - NcEV dO-ModeloDocument1 pageOVALO HUANCHACO - NcEV dO-Modelomaria caquiNo ratings yet
- Implantacion Bloque 12 MedellinDocument1 pageImplantacion Bloque 12 Medellincamila-70103No ratings yet
- Plan MaestroDocument1 pagePlan MaestroDiego SFNo ratings yet
- Zona Monumental Hyo Dividido en 9 (2) - ModelDocument1 pageZona Monumental Hyo Dividido en 9 (2) - ModelAnghel GarciaNo ratings yet
- PL GM10 - 01.03.03 - Mod Tapa Sup I Inf - A001Document1 pagePL GM10 - 01.03.03 - Mod Tapa Sup I Inf - A001claudia.nativitat.mirNo ratings yet
- Desen Ansamblu BK 055IE 400kVA RMU - LLTDocument1 pageDesen Ansamblu BK 055IE 400kVA RMU - LLTAndrei BrinzoiNo ratings yet
- Esquematico Puente HDocument1 pageEsquematico Puente Hdiego isaacNo ratings yet
- Mini PLCDocument3 pagesMini PLCtnenNo ratings yet
- Mater Mea - Marcha de ProcesionDocument1 pageMater Mea - Marcha de Procesionalvaro0molina0iglesiNo ratings yet
- Mater Mea - Marcha de ProcesionDocument1 pageMater Mea - Marcha de ProcesionAlejandro Cabrera RamirezNo ratings yet
- C Users Dani Desktop Practiques Quadres QUADRE ELECTRICDocument10 pagesC Users Dani Desktop Practiques Quadres QUADRE ELECTRICtrunderNo ratings yet
- Seccion 1Document1 pageSeccion 1Nehemias Esquivel EsquibelNo ratings yet
- IMA3 - Résultats Annuels - Session 1 - 2022-2023Document3 pagesIMA3 - Résultats Annuels - Session 1 - 2022-2023Nikolay KhachatryanNo ratings yet
- PCB DTMF Bethel Radio Top 06Document1 pagePCB DTMF Bethel Radio Top 06Frank's Ĵalanok'a CruzNo ratings yet
- ELI INVENTARIADO-Layout1Document1 pageELI INVENTARIADO-Layout1norma marithza choquecota quispeNo ratings yet
- PLANO - BRACKET COMBA DTM 0° A 3° - Rev 1-BRACKETDocument1 pagePLANO - BRACKET COMBA DTM 0° A 3° - Rev 1-BRACKETEstefanía BahamondesNo ratings yet
- 02 Layout1Document1 page02 Layout1INVERTOP GEODESIATOPOGRAFIANo ratings yet
- Diagrama Unifilar GeneradorDocument1 pageDiagrama Unifilar GeneradororlandoNo ratings yet
- ELCTRICA 1fDocument1 pageELCTRICA 1fsandra paolaNo ratings yet
- 2018.05.24 - 9.detaliu Grinda - Prefabricate MereniDocument2 pages2018.05.24 - 9.detaliu Grinda - Prefabricate MereniMariusLungescuNo ratings yet
- Schema AKO 17635351763510Document2 pagesSchema AKO 17635351763510Amic BanatNo ratings yet
- Mapa Demosntrativo-Model AssinadoDocument1 pageMapa Demosntrativo-Model AssinadomarlisonbrandaoNo ratings yet
- 01 Rs Villa Pasco v5 (A3) - A3Document1 page01 Rs Villa Pasco v5 (A3) - A3vetmanNo ratings yet
- Catre Turn: Prin Curtile InterioareDocument1 pageCatre Turn: Prin Curtile InterioareRosu MariusNo ratings yet
- Sisa Pengeboran 5 Des 2022Document1 pageSisa Pengeboran 5 Des 2022Arif CahyonoNo ratings yet
- Circuit Diagram 3606967Document11 pagesCircuit Diagram 3606967BHAUSAHEB TAMBARENo ratings yet
- Plano Cho - 2800-003 - Et-01 y 02 LocalDocument1 pagePlano Cho - 2800-003 - Et-01 y 02 LocalComercializadora S&ENo ratings yet
- Site Plan Monocrom A0Document1 pageSite Plan Monocrom A0Lucky LuckNo ratings yet
- Carga Electronica V3Document1 pageCarga Electronica V3Guillermo ArevaloNo ratings yet
- C.1 RPP SupervisiDocument1 pageC.1 RPP SupervisiAzima TunisaNo ratings yet
- Moltes FelicitatsDocument1 pageMoltes FelicitatsJuanjo RuizNo ratings yet
- T5 - Successions I ProgressionsDocument13 pagesT5 - Successions I Progressionssemeniucmateea50No ratings yet
- LCDSCHDocument1 pageLCDSCHcuserNo ratings yet
- Horarios Trenes y BusesDocument6 pagesHorarios Trenes y Busesdeniserod2499No ratings yet
- Layout Nha Xuong Chu Lai (2023) V2 - 3Document1 pageLayout Nha Xuong Chu Lai (2023) V2 - 3ngocNo ratings yet
- Sbbe Rnp-Rwy-24 Iac 20211202Document1 pageSbbe Rnp-Rwy-24 Iac 20211202Luiz SantosNo ratings yet
- Màndale Una Carta A Tu MaridoDocument1 pageMàndale Una Carta A Tu MaridoOscar Ferney Mirquez CespedesNo ratings yet
- Hoja de Corrección y PerfilesDocument3 pagesHoja de Corrección y PerfilesJosselyn JuárezNo ratings yet
- Continúa IdemDocument1 pageContinúa IdemWalter Flores SernaqueNo ratings yet
- Informações Técnicas RollairDocument4 pagesInformações Técnicas RollairJunio MartinsNo ratings yet
- Plano Editado Final Blanco y NegroDocument1 pagePlano Editado Final Blanco y Negroaby14150No ratings yet
- Replanteo EstacionamienstoDocument1 pageReplanteo Estacionamienstoelpiwi124No ratings yet
- DL 10Document1 pageDL 10Ricardo MoralesNo ratings yet
- M1 - UF2 - NF2 - AEA1 Pràctica Electropneumàtica 1.1Document3 pagesM1 - UF2 - NF2 - AEA1 Pràctica Electropneumàtica 1.1Sergio KastNo ratings yet
- UF2 NF2 Tema2Document15 pagesUF2 NF2 Tema2Sergio KastNo ratings yet
- Unitat 9 Electropneum TicaDocument20 pagesUnitat 9 Electropneum TicaSergio KastNo ratings yet
- UF2 NF2 Tema1 PDFDocument6 pagesUF2 NF2 Tema1 PDFSergio KastNo ratings yet
- M1 - UF2 - NF2 - AEA3 Pràctiques Electropneumàtica 2Document3 pagesM1 - UF2 - NF2 - AEA3 Pràctiques Electropneumàtica 2Sergio KastNo ratings yet
- Unitat 4 ElectropneumaticaDocument17 pagesUnitat 4 ElectropneumaticaSergio KastNo ratings yet
- Unitat 2Document14 pagesUnitat 2Sergio KastNo ratings yet
- UF1 - NF1 - A2 - Activitat 2Document1 pageUF1 - NF1 - A2 - Activitat 2Sergio KastNo ratings yet
- Càlcul Aplicat A Actuadors PneumàticsDocument12 pagesCàlcul Aplicat A Actuadors PneumàticsSergio KastNo ratings yet
- Unitat 3Document26 pagesUnitat 3Sergio KastNo ratings yet