Download as pdf or txt
You might also like
- Robotics Simplified: An Illustrative Guide to Learn Fundamentals of Robotics, Including Kinematics, Motion Control, and Trajectory PlanningFrom EverandRobotics Simplified: An Illustrative Guide to Learn Fundamentals of Robotics, Including Kinematics, Motion Control, and Trajectory PlanningNo ratings yet
- Hino BS-III EngineDocument79 pagesHino BS-III EngineMohan Charanchath100% (1)
- Abaqus 1 250Document250 pagesAbaqus 1 250taims taimxNo ratings yet
- Liu Rui 2017Document80 pagesLiu Rui 2017Anonymous lswzqloNo ratings yet
- Sample Computer Motherboard Repair ExpertDocument15 pagesSample Computer Motherboard Repair Expertuntung soebagyoNo ratings yet
- Textbook Train Operation in Emergencies 1St Edition Limin Jia Ebook All Chapter PDFDocument53 pagesTextbook Train Operation in Emergencies 1St Edition Limin Jia Ebook All Chapter PDFray.pilla380100% (6)
- ME8073 - Unconventional Machining Process (Ripped From Amazon Kindle Ebooks by Sai Seena)Document260 pagesME8073 - Unconventional Machining Process (Ripped From Amazon Kindle Ebooks by Sai Seena)Johnson JohnsonNo ratings yet
- Mesb4013 Group 1 Mini Project ReportDocument22 pagesMesb4013 Group 1 Mini Project ReportShahid AmmarNo ratings yet
- S E D OF Mechaincal Engineering: Athmandu NiversityDocument28 pagesS E D OF Mechaincal Engineering: Athmandu NiversitySURESHNo ratings yet
- Train Operation in EmergenciesDocument148 pagesTrain Operation in EmergenciesMuluken MesfinNo ratings yet
- Analysis The Car Engine Connecting Rod of Buckling and Fatigue Failure With Thermal Effect UpdatedDocument28 pagesAnalysis The Car Engine Connecting Rod of Buckling and Fatigue Failure With Thermal Effect UpdatedKarisash AshNo ratings yet
- TennesseDocument96 pagesTennesseAkshathaNo ratings yet
- Pages From 1+1 CoachDocument30 pagesPages From 1+1 CoachSamuelNo ratings yet
- S. P. Bali - Electrical Technology Machines & Measurement Vol 2-Pearson Education (2013) PDFDocument451 pagesS. P. Bali - Electrical Technology Machines & Measurement Vol 2-Pearson Education (2013) PDFRaghul R100% (2)
- Modeling and Simulation PDFDocument657 pagesModeling and Simulation PDFWanki E Phawa SungohNo ratings yet
- Automatic Book Reader: Submitted ByDocument27 pagesAutomatic Book Reader: Submitted ByAprajita shrivastavaNo ratings yet
- Study and Fabrication of Electromagnetic Braking System.: August 2017Document29 pagesStudy and Fabrication of Electromagnetic Braking System.: August 2017SrinathNo ratings yet
- Matrix Converter1Document131 pagesMatrix Converter1Zakaria ElbarbaryNo ratings yet
- Bao Cao DtcsDocument47 pagesBao Cao DtcsNguyên NguyễnNo ratings yet
- Engineering Applications of Discrete Element Method: Xuewen Wang Bo Li Rui Xia Haozhou MaDocument186 pagesEngineering Applications of Discrete Element Method: Xuewen Wang Bo Li Rui Xia Haozhou MaHariharan RamanathanNo ratings yet
- Design and Analysis of A Magneto-Rheological Fluid Damper With Non-Linear Surfaces To Produce Effective Variable Compliance in A Robotic TransmissionDocument58 pagesDesign and Analysis of A Magneto-Rheological Fluid Damper With Non-Linear Surfaces To Produce Effective Variable Compliance in A Robotic TransmissionpavanNo ratings yet
- Book - Nonlinear Estimation and Control of Automotive Drivetrains - Compressed-1Document65 pagesBook - Nonlinear Estimation and Control of Automotive Drivetrains - Compressed-1Γιάννης ΝικόλαNo ratings yet
- Power TrainDocument257 pagesPower TrainStorm SpiritNo ratings yet
- Analysis and Mathematical Models of Canned Electrical Machine Drives in Particular A Canned Switched Reluctance Machine Qiang YuDocument54 pagesAnalysis and Mathematical Models of Canned Electrical Machine Drives in Particular A Canned Switched Reluctance Machine Qiang Yujuanita.langford273100% (21)
- Final Reporton Electromagnetci Braking SystemDocument29 pagesFinal Reporton Electromagnetci Braking Systemrodrigo.cubanoNo ratings yet
- DPM Class-NotesDocument38 pagesDPM Class-NotesZephaniah MuneneNo ratings yet
- Modern Mechanics and Applications Select Proceedings of ICOMMA 2020 1st Edition Nguyen Tien KhiemDocument69 pagesModern Mechanics and Applications Select Proceedings of ICOMMA 2020 1st Edition Nguyen Tien Khiemcandy.garrido657100% (11)
- MSC ThesisDocument125 pagesMSC ThesisSangamithran Duraiswmay100% (1)
- Car - Stereo - For - Repairs BDocument27 pagesCar - Stereo - For - Repairs BSamuelNo ratings yet
- Lin 2017Document4 pagesLin 2017Ajith KumarNo ratings yet
- 978 93 5099 824 3 (1) - Elements of Mechanical Enginering - EbookDocument230 pages978 93 5099 824 3 (1) - Elements of Mechanical Enginering - EbookamarparimiNo ratings yet
- UntitledDocument255 pagesUntitledSung Ryoung LimNo ratings yet
- Open Conductor Faults and Dynamic Analysis Power System (Thesis 2012) PDFDocument97 pagesOpen Conductor Faults and Dynamic Analysis Power System (Thesis 2012) PDFafwdNo ratings yet
- Disertatie AlexDinuDocument15 pagesDisertatie AlexDinuAlex DinuNo ratings yet
- 3-D Computer Vision: Yu-Jin ZhangDocument453 pages3-D Computer Vision: Yu-Jin ZhangWendy ContrerasNo ratings yet
- M02-Assemble Antenna and SignalDocument115 pagesM02-Assemble Antenna and SignalYohannes TesfayeNo ratings yet
- Optimization of Manufacturing Production and ProceDocument35 pagesOptimization of Manufacturing Production and ProceRoger Alonso Zambrano ValeroNo ratings yet
- Grenier Mathieu MSCDocument89 pagesGrenier Mathieu MSCVishal VnNo ratings yet
- LeiWang-Thesis 12202017.1Document90 pagesLeiWang-Thesis 12202017.1Khoa Nguyễn AnhNo ratings yet
- A Pipeline Inspection Robot With A Linkage Type Mechanical ClutchDocument6 pagesA Pipeline Inspection Robot With A Linkage Type Mechanical ClutchNUBIA DIAZNo ratings yet
- Zaverecna PraceDocument45 pagesZaverecna Pracevijay kumarNo ratings yet
- BK92PUB5 Table of ContentDocument6 pagesBK92PUB5 Table of Contentmariomato100% (1)
- Induction Vs Permanent Magnet MotorsDocument150 pagesInduction Vs Permanent Magnet MotorsRomulo AlvarezNo ratings yet
- Current TransformerDocument66 pagesCurrent TransformeraadieNo ratings yet
- Doubly Fed Electrical MachinesDocument282 pagesDoubly Fed Electrical MachinesjalilemadiNo ratings yet
- Final Reporton Electromagnetci Braking SystemDocument29 pagesFinal Reporton Electromagnetci Braking Systemsandeep ThangellapalliNo ratings yet
- Xr-Ee-Eme 2010 08Document80 pagesXr-Ee-Eme 2010 08jkdarsiNo ratings yet
- Study and Fabrication of Electromagnetic Braking System.: August 2017Document29 pagesStudy and Fabrication of Electromagnetic Braking System.: August 2017Dhruv JadavNo ratings yet
- Vol 116Document31 pagesVol 116Alexandru RadulianNo ratings yet
- Nove TMM Angl Metod 2018Document44 pagesNove TMM Angl Metod 2018felix laraNo ratings yet
- Non LineaerDocument324 pagesNon Lineaerharishram123456No ratings yet
- Obstacle Avoiding Robot Using Pid ControllerDocument48 pagesObstacle Avoiding Robot Using Pid ControllerĐặng Duy TùngNo ratings yet
- Pamantasan NG Cabuyao: College of EngineeringDocument32 pagesPamantasan NG Cabuyao: College of EngineeringKarl Angelo ReyesNo ratings yet
- Thesis On Induction MotorDocument5 pagesThesis On Induction Motortonichristensenaurora100% (2)
- Mechatronic System Design Line Following RobotDocument37 pagesMechatronic System Design Line Following RobotPhạm Hữu PhướcNo ratings yet
- Advanced Noncontact Cutting and Joining Technologies: Micro- and Nano-manufacturingFrom EverandAdvanced Noncontact Cutting and Joining Technologies: Micro- and Nano-manufacturingNo ratings yet
- 71 Electrical & Electronic Porjects (With Cd): For beginners, intermediate and engineering studentsFrom Everand71 Electrical & Electronic Porjects (With Cd): For beginners, intermediate and engineering studentsRating: 5 out of 5 stars5/5 (3)
- PrevDocument68 pagesPrevSamuelNo ratings yet
- Proposal of Research BADocument27 pagesProposal of Research BASamuel100% (4)
- LO #1-Planning and Preparing Installation Work: Installing Instrumentation and Control DevicesDocument38 pagesLO #1-Planning and Preparing Installation Work: Installing Instrumentation and Control DevicesSamuelNo ratings yet
- Mel416sudipto rrd17 26apr2013Document73 pagesMel416sudipto rrd17 26apr2013SamuelNo ratings yet
- R.proposal 2-1Document38 pagesR.proposal 2-1Samuel100% (2)
- Pages From 1+1 CoachDocument30 pagesPages From 1+1 CoachSamuelNo ratings yet
- Date Employeer's Name Abnet Eshetu Bereket G/egziabher Meskerem TemesgenDocument94 pagesDate Employeer's Name Abnet Eshetu Bereket G/egziabher Meskerem TemesgenSamuelNo ratings yet
- Car - Stereo - For - Repairs BDocument27 pagesCar - Stereo - For - Repairs BSamuelNo ratings yet
- ch-III R - EthicsDocument10 pagesch-III R - EthicsSamuelNo ratings yet
- Discharge Stimulation of Geothermal Wells Overview and AnalysisDocument21 pagesDischarge Stimulation of Geothermal Wells Overview and AnalysisNurrahmisrNo ratings yet
- Stabilization of Expansive Soil Using Fly Ash: A Dissertation Submitted byDocument72 pagesStabilization of Expansive Soil Using Fly Ash: A Dissertation Submitted byVARUN RANANo ratings yet
- Manual PSAT PDFDocument260 pagesManual PSAT PDFCan Mert KalaycıNo ratings yet
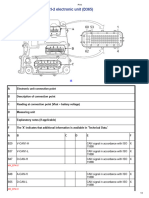
- CAN Connections of PMCI-2 Electronic Unit (D365)Document3 pagesCAN Connections of PMCI-2 Electronic Unit (D365)Oscar De la fuenteNo ratings yet
- A Fan For All Seasons A Fan For All Seasons: CirculationDocument84 pagesA Fan For All Seasons A Fan For All Seasons: CirculationshaikhbwcNo ratings yet
- Cast Iron Welding - Procedures and Free GuideDocument8 pagesCast Iron Welding - Procedures and Free GuideKhin Aung ShweNo ratings yet
- Inhibition of X80 Steel Corrosion in Oilfield Acidizing Environment PDFDocument9 pagesInhibition of X80 Steel Corrosion in Oilfield Acidizing Environment PDFLê CôngNo ratings yet
- ERV Floating ProcedureDocument16 pagesERV Floating ProcedureDipti BhanjaNo ratings yet
- Tidal PowerDocument12 pagesTidal PowerOpenTalkNo ratings yet
- 950H, 962H and IT62H Wheel Loader Hydraulic System: Command Control SteeringDocument2 pages950H, 962H and IT62H Wheel Loader Hydraulic System: Command Control SteeringTeofilo Paredes CosmeNo ratings yet
- Special Theory of ReletivityDocument41 pagesSpecial Theory of ReletivityRM FakharNo ratings yet
- M101c - Costs&Benefits of Digital Technologies: Author: Prof. Dr. Meltem Ucal, KHAS, Turkey Ceren Takımlı, KHAS, TurkeyDocument18 pagesM101c - Costs&Benefits of Digital Technologies: Author: Prof. Dr. Meltem Ucal, KHAS, Turkey Ceren Takımlı, KHAS, Turkeymaia maiaNo ratings yet
- Challenges and Strategies of Rural Electrification Program For Electric Cooperatives in Central Luzon, PhilippinesDocument9 pagesChallenges and Strategies of Rural Electrification Program For Electric Cooperatives in Central Luzon, PhilippinesIOER International Multidisciplinary Research Journal ( IIMRJ)No ratings yet
- 30hr PDFDocument36 pages30hr PDFKevin LeungNo ratings yet
- Backhoe Operator AssessmentDocument27 pagesBackhoe Operator AssessmentGermain DgermainNo ratings yet
- PsychrometricsDocument13 pagesPsychrometricssuirezNo ratings yet
- Minimum and Maximum Voltages: Socorro Lopez Cecs 311 Lab#3 Fall 2013 Due:10/15/13 ID:009162827Document5 pagesMinimum and Maximum Voltages: Socorro Lopez Cecs 311 Lab#3 Fall 2013 Due:10/15/13 ID:009162827marhta lopezNo ratings yet
- Asphalt Pump 5 26Document2 pagesAsphalt Pump 5 26pietrofracassiNo ratings yet
- Improved Hybrid Switched Inductor Switched Capacitor DC-DC ConvertersDocument10 pagesImproved Hybrid Switched Inductor Switched Capacitor DC-DC ConvertersMasoom AhmedNo ratings yet
- 4.effects of Electric Current (New Indian Era) by PrashantDocument7 pages4.effects of Electric Current (New Indian Era) by PrashantJuned MulaniNo ratings yet
- Dme C14 PDFDocument254 pagesDme C14 PDFRajaReddy100% (1)
- Owner'S Instruction Manual: Tractor Driven AlternatorDocument16 pagesOwner'S Instruction Manual: Tractor Driven Alternatormarvin17No ratings yet
- Kl25z SchematicDocument5 pagesKl25z SchematicMenandro AmbanlocNo ratings yet
- Colfax Mechanical Seal LeakageDocument4 pagesColfax Mechanical Seal Leakagesoumya19800000000No ratings yet
- Smockb Assignment1Document5 pagesSmockb Assignment1api-317462017No ratings yet
- CV of Md. Rafiqul Islam PDFDocument3 pagesCV of Md. Rafiqul Islam PDFRafiqul IslamNo ratings yet
- PC130-8 Uess13603 1009 EngDocument28 pagesPC130-8 Uess13603 1009 EngSebastian GeraciNo ratings yet
- Laboratory em 4 Mercury PorosimetryDocument4 pagesLaboratory em 4 Mercury Porosimetrysaikat_cepNo ratings yet
- Chapter No. 5 (Theory Notes)Document23 pagesChapter No. 5 (Theory Notes)Kashif MahmoodNo ratings yet