Download as pdf or txt
You might also like
- Digital Modulations using MatlabFrom EverandDigital Modulations using MatlabRating: 4 out of 5 stars4/5 (6)
- NX Post-Builder PDFDocument65 pagesNX Post-Builder PDFThe Anh100% (3)
- SCRIPT Christmas PartyDocument3 pagesSCRIPT Christmas PartyRaffy Bello67% (6)
- 0.1 Guilherme Marthe - Boston House Pricing ChallengeDocument15 pages0.1 Guilherme Marthe - Boston House Pricing ChallengeGuilherme Marthe100% (1)
- Week9 Apdl 2Document19 pagesWeek9 Apdl 2Ananto Yusuf WNo ratings yet
- Manu Kant: Executive SummaryDocument6 pagesManu Kant: Executive SummarymanukleoNo ratings yet
- IBwave Release NotesDocument42 pagesIBwave Release NotesMayar ZoNo ratings yet
- DMC 1000Document206 pagesDMC 1000luislucas13100% (1)
- Monitoringreactiveapplications Webinar 160728171015Document33 pagesMonitoringreactiveapplications Webinar 160728171015Vladimir SimićNo ratings yet
- Hardware-Software Codesign Lab ReportDocument15 pagesHardware-Software Codesign Lab ReportvaljokNo ratings yet
- Testlab Software Reference Manual - Functions and FormulasDocument12 pagesTestlab Software Reference Manual - Functions and Formulasmuhammad irfanNo ratings yet
- Segment Lidar v0.2.1Document21 pagesSegment Lidar v0.2.1dorandhosNo ratings yet
- Traffic Sign Classification: BY Qasim Lakdawala (19BT04020) Husain Kalolwala (19BT04016)Document18 pagesTraffic Sign Classification: BY Qasim Lakdawala (19BT04020) Husain Kalolwala (19BT04016)Kasim LakdawalaNo ratings yet
- 4.3.2.4 Lab - Internet Meter Anomaly DetectionDocument8 pages4.3.2.4 Lab - Internet Meter Anomaly DetectionNurul Fadillah JannahNo ratings yet
- Prometheus Grafana SetupDocument5 pagesPrometheus Grafana SetupAslam Ansari100% (1)
- Lab Sheet 4Document3 pagesLab Sheet 498140207No ratings yet
- XCELIUM BASIC Vs ADVANCED PROFILERDocument9 pagesXCELIUM BASIC Vs ADVANCED PROFILERPriya Jeejo0% (1)
- Sspmdcrel NotesDocument36 pagesSspmdcrel NotessamadraslanNo ratings yet
- Assignment GNCDocument3 pagesAssignment GNCAyush JhaNo ratings yet
- Chapter 3: Code Optimization and Code Version ControlDocument30 pagesChapter 3: Code Optimization and Code Version ControlAstha AggarwalNo ratings yet
- ML0101EN Reg Mulitple Linear Regression Co2 Py v1Document5 pagesML0101EN Reg Mulitple Linear Regression Co2 Py v1Rajat SolankiNo ratings yet
- Verilog AMS TutorialDocument29 pagesVerilog AMS TutorialSiva KrishnaNo ratings yet
- Fpga Implementation of Fir Filter in Signal Processing: AbstractDocument4 pagesFpga Implementation of Fir Filter in Signal Processing: AbstractShafiullaShaikNo ratings yet
- Lab ViewDocument48 pagesLab Viewsuresh270No ratings yet
- DMIS Note Analyzers With Separated Scenarios For ABAP-based Migration and Replication Technology (DMIS2011/DMIS2018/DMIS2020/SAP S/4HANA)Document5 pagesDMIS Note Analyzers With Separated Scenarios For ABAP-based Migration and Replication Technology (DMIS2011/DMIS2018/DMIS2020/SAP S/4HANA)Anonymous mZ54AbOuNo ratings yet
- Seisspace®/Promax®/ Promax® Depthcharge: Release NotesDocument71 pagesSeisspace®/Promax®/ Promax® Depthcharge: Release NoteschenxqNo ratings yet
- Review On Word Length Optimization: Pandi G Sabareeswari, Bhuvaneswari S DR Manivannan SDocument4 pagesReview On Word Length Optimization: Pandi G Sabareeswari, Bhuvaneswari S DR Manivannan Sbhuvana_eeeNo ratings yet
- Embedded System DesignDocument92 pagesEmbedded System DesignMubeen MusthakeemNo ratings yet
- Lab 4 - ReportDocument17 pagesLab 4 - Reportmayowae6No ratings yet
- rADINA Elnotes - 94Document33 pagesrADINA Elnotes - 94Sç-č AbabiiNo ratings yet
- SN-IND-1-004 CANalyzer Panel With SendFunctionalityDocument4 pagesSN-IND-1-004 CANalyzer Panel With SendFunctionalityPriyanka SubhuNo ratings yet
- Assignment1 FNDocument8 pagesAssignment1 FNVân Anh NguyễnNo ratings yet
- Hypermesh BasicsDocument230 pagesHypermesh Basicsanup_22988No ratings yet
- Ceilometer Introduction PDFDocument25 pagesCeilometer Introduction PDFSaravanaRaajaaNo ratings yet
- GSM ActixDocument64 pagesGSM ActixNenad100% (1)
- 17IT8029Document7 pages17IT8029AlexNo ratings yet
- Gcod Pentru ArduinoDocument11 pagesGcod Pentru ArduinominossotaNo ratings yet
- Computer Application in Mining Ii Part 1Document56 pagesComputer Application in Mining Ii Part 1Isha IssahNo ratings yet
- FPGA Design of A Fast 32-Bit Floating PointDocument3 pagesFPGA Design of A Fast 32-Bit Floating PointNguyễn CườngNo ratings yet
- CM3068 en Alarm Criteria 010512Document6 pagesCM3068 en Alarm Criteria 010512FazliJaafarNo ratings yet
- FINE Marine PDFDocument8 pagesFINE Marine PDFebwNo ratings yet
- Aeroquad Flight Software Developer'S GuideDocument9 pagesAeroquad Flight Software Developer'S GuideleiserhartbeckNo ratings yet
- Devices 6212 Reference GuideDocument128 pagesDevices 6212 Reference GuideMohamed El-TokhyNo ratings yet
- Manual Gocator GDK PDFDocument23 pagesManual Gocator GDK PDFDimitriNo ratings yet
- No More Sad Pandas: Optimizing Pandas Code For Performance: Lead Data ScientistDocument48 pagesNo More Sad Pandas: Optimizing Pandas Code For Performance: Lead Data ScientistSiddarth BhusanshettyNo ratings yet
- 09 AcceleratorsDocument47 pages09 AcceleratorsgkudrethayaNo ratings yet
- ProMAX SeisSpace 5000.0.1Document103 pagesProMAX SeisSpace 5000.0.1samadraslanNo ratings yet
- Internet of ThingsDocument5 pagesInternet of Thingsshaikrafi 13022001No ratings yet
- Eecs 151/251A Asic Lab 2: Simulation: Prof. John Wawrzynek Tas: Quincy Huynh, Tan NguyenDocument12 pagesEecs 151/251A Asic Lab 2: Simulation: Prof. John Wawrzynek Tas: Quincy Huynh, Tan NguyenNguyen Van ToanNo ratings yet
- Dspace Control Development PDFDocument123 pagesDspace Control Development PDFMuhammad Ali Masood CheemaNo ratings yet
- How To Access The Rapid Adoption Kits?Document11 pagesHow To Access The Rapid Adoption Kits?Kumar KumarNo ratings yet
- Creating Signal Coverage Contour Plots With Surfer Software From Measured Data Captured With ZTI Drive-Test SystemsDocument17 pagesCreating Signal Coverage Contour Plots With Surfer Software From Measured Data Captured With ZTI Drive-Test SystemsMuhammad Rizky Aulia HarahapNo ratings yet
- Fir Compiler Ds534Document83 pagesFir Compiler Ds534Manasa UpadhyayaNo ratings yet
- Functions and PackagesDocument7 pagesFunctions and PackagesNur SyazlianaNo ratings yet
- Robust Controller Design Using Multi-Objective Optimization Power Management DesignLineDocument5 pagesRobust Controller Design Using Multi-Objective Optimization Power Management DesignLineIvana PrezimeNo ratings yet
- FIR FilterDocument5 pagesFIR FilterManasa UpadhyayaNo ratings yet
- Lab # 07 IIR PDFDocument13 pagesLab # 07 IIR PDFIrfan HaiderNo ratings yet
- Navi Pac 46Document54 pagesNavi Pac 46Nur SofyanNo ratings yet
- Implementation of Carry Select Adder Using Verilog On FPGA: Sapan Desai (17BEC023) & Devansh Chawla (17BEC024)Document9 pagesImplementation of Carry Select Adder Using Verilog On FPGA: Sapan Desai (17BEC023) & Devansh Chawla (17BEC024)Sapan DesaiNo ratings yet
- Python Advanced Programming: The Guide to Learn Python Programming. Reference with Exercises and Samples About Dynamical Programming, Multithreading, Multiprocessing, Debugging, Testing and MoreFrom EverandPython Advanced Programming: The Guide to Learn Python Programming. Reference with Exercises and Samples About Dynamical Programming, Multithreading, Multiprocessing, Debugging, Testing and MoreNo ratings yet
- Schwippbogen Flucht VorlageDocument1 pageSchwippbogen Flucht Vorlagetobajej752No ratings yet
- V-Core 3 - Ballscrews Z UpgradeDocument18 pagesV-Core 3 - Ballscrews Z Upgradetobajej752No ratings yet
- Orbiter v1.5 Firmware Configuration Card v1.1Document4 pagesOrbiter v1.5 Firmware Configuration Card v1.1tobajej752No ratings yet
- Read Me 1000 Times V1Document6 pagesRead Me 1000 Times V1tobajej752No ratings yet
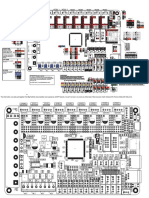
- BIGTREETECH Octopus V1.0 - PINDocument2 pagesBIGTREETECH Octopus V1.0 - PINtobajej752No ratings yet
- V-Core Assembly Guide - Complete PDFDocument73 pagesV-Core Assembly Guide - Complete PDFtobajej752No ratings yet
- Stepper Decoupling and Visual Belt ModDocument1 pageStepper Decoupling and Visual Belt Modtobajej752No ratings yet
- Dragon - Hotend Assembly Disassembly InstructionsDocument6 pagesDragon - Hotend Assembly Disassembly Instructionstobajej752No ratings yet
- APG IdentifyProcessesDocument2 pagesAPG IdentifyProcessesMitul PatelNo ratings yet
- CV & Proposal Fiqhan Fadillah Makky (1) en-USDocument23 pagesCV & Proposal Fiqhan Fadillah Makky (1) en-USFiqhan Fadillah MakkyNo ratings yet
- Samsung Galaxy Z Fold3 5g - DatasheetDocument1 pageSamsung Galaxy Z Fold3 5g - Datasheetsnehal puthalath shanmughanNo ratings yet
- Calculus+1+ +limits+ +worksheet+5+ +Limits+Involving+Trig+FunctionsDocument28 pagesCalculus+1+ +limits+ +worksheet+5+ +Limits+Involving+Trig+FunctionsWanchomNo ratings yet
- Foto DiscDocument12 pagesFoto DiscFaris TheRizmiNo ratings yet
- Ultrasonic Guided Wave Damage Localization in Hole-Structural Bearing Crossbeam Based On Improved RAPID AlgorithmDocument13 pagesUltrasonic Guided Wave Damage Localization in Hole-Structural Bearing Crossbeam Based On Improved RAPID AlgorithmGuillermo AzuaraNo ratings yet
- User's Manual of RDC6332G Control System: RD Co., LTDDocument47 pagesUser's Manual of RDC6332G Control System: RD Co., LTDcassioalvarengaNo ratings yet
- 02 - Catch The Beetle 2022 NEWDocument2 pages02 - Catch The Beetle 2022 NEWKunj PatelNo ratings yet
- Logistics 4.0 and Future of Supply Chains-Springer (2022)Document287 pagesLogistics 4.0 and Future of Supply Chains-Springer (2022)Minh Quân Đặng LêNo ratings yet
- Foxboro RTT20 Temp Transmitter - 2Document24 pagesFoxboro RTT20 Temp Transmitter - 2Carlos GuilarteNo ratings yet
- 123Document5 pages123Nguyen Tang KyNo ratings yet
- Day 3. GPIO (p2)Document17 pagesDay 3. GPIO (p2)Hoàng NguyễnNo ratings yet
- Health ManagementDocument2 pagesHealth Managementcabansag cnikjay35No ratings yet
- It3000ex - Dbe Min 1Document4 pagesIt3000ex - Dbe Min 1M Yogi TriansyahNo ratings yet
- Infomercial 5Document17 pagesInfomercial 5Mark Lowie Acetre ArtillagasNo ratings yet
- K MapDocument30 pagesK MapJENATH223No ratings yet
- INF1102F - S Tutor Job - Description 2023Document2 pagesINF1102F - S Tutor Job - Description 2023tebatsomadigoe1No ratings yet
- Final ReportDocument79 pagesFinal Reportmarjana bharaliNo ratings yet
- 6 CurriculumDocument1 page6 Curriculumapi-237183310No ratings yet
- Hashing PPT For StudentDocument53 pagesHashing PPT For StudentshailNo ratings yet
- Final JEMS at Renault - Looker Custom VisDocument10 pagesFinal JEMS at Renault - Looker Custom VisEmna BeyNo ratings yet
- Analyzing Oracle Workflow Data For Increased System Performance Whitepaper v1.1 PDFDocument64 pagesAnalyzing Oracle Workflow Data For Increased System Performance Whitepaper v1.1 PDFboualem.iniNo ratings yet
- StatsDocument4 pagesStatsYour NameNo ratings yet
- DTE MPDocument17 pagesDTE MPHarsh tandelNo ratings yet
- L&T Acb ManualDocument26 pagesL&T Acb ManualMohanNo ratings yet
- Final Fantasy - WikipediaDocument50 pagesFinal Fantasy - WikipediaRichard R.IgnacioNo ratings yet
- Listening SoalDocument5 pagesListening SoalanggiyumikaNo ratings yet
- 6-Laboratoriya Ishi Parallеl Tеbranish Konturining Tadqiq Etish Ishning maqsadi - parallеl tеbranish konturining chastotaviy tavsiflarini,Document45 pages6-Laboratoriya Ishi Parallеl Tеbranish Konturining Tadqiq Etish Ishning maqsadi - parallеl tеbranish konturining chastotaviy tavsiflarini,A FargoniyNo ratings yet