Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- TM343686C MHR 360 Deg Radar System Deployment ManualDocument72 pagesTM343686C MHR 360 Deg Radar System Deployment ManualZayar HeinNo ratings yet
- Rapid Fire Able Archer 2019 EditionDocument27 pagesRapid Fire Able Archer 2019 Editionsalzinger100% (2)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- EE4109 Wireless System Design - OBTLDocument7 pagesEE4109 Wireless System Design - OBTLAaron TanNo ratings yet
- 'At The Table or On The Menu?' - The European Union and Turkey's Accession ProcessDocument24 pages'At The Table or On The Menu?' - The European Union and Turkey's Accession ProcessAstro MikeNo ratings yet
- (A C.1 4 Annexes Pt.I) - enDocument46 pages(A C.1 4 Annexes Pt.I) - enAstro MikeNo ratings yet
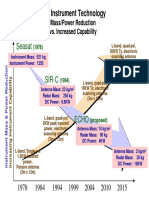
- SAR Instrument Technology: SeasatDocument1 pageSAR Instrument Technology: SeasatAstro MikeNo ratings yet
- AOR/Annapolis/IRE/Iroquois/Mackenzie/St. Laurent Classes - Radio Antenna FittingsDocument15 pagesAOR/Annapolis/IRE/Iroquois/Mackenzie/St. Laurent Classes - Radio Antenna FittingsAstro MikeNo ratings yet
- Broadband Coax-Waveguide Transitions: T. Rizawa#, R. Pendleton Stanford Linear Accelerator Center, CA 94309, USADocument3 pagesBroadband Coax-Waveguide Transitions: T. Rizawa#, R. Pendleton Stanford Linear Accelerator Center, CA 94309, USAAstro MikeNo ratings yet
- README 1515 2929SQ Springs PDFDocument3 pagesREADME 1515 2929SQ Springs PDFAstro MikeNo ratings yet
- He MD: Mu WilllwDocument6 pagesHe MD: Mu WilllwAstro MikeNo ratings yet
- Readme Sqsprings PDFDocument3 pagesReadme Sqsprings PDFAstro MikeNo ratings yet
- Smith Chart For Excel - RFMDDocument6 pagesSmith Chart For Excel - RFMDAstro MikeNo ratings yet
- Optenni Lab 4.1 Installation Instructions - 2017!09!29Document17 pagesOptenni Lab 4.1 Installation Instructions - 2017!09!29Astro MikeNo ratings yet
- Optenni Lab 4.1 Installation Instructions - 2017 - 09 - 29 PDFDocument3 pagesOptenni Lab 4.1 Installation Instructions - 2017 - 09 - 29 PDFAstro MikeNo ratings yet
- 1ap 0182Document3 pages1ap 0182Astro MikeNo ratings yet
- Idsdaddy - GithubDocument3 pagesIdsdaddy - GithubdianneNo ratings yet
- Corporate BEL Brochure - 20 Pages-11-05-23Document20 pagesCorporate BEL Brochure - 20 Pages-11-05-23ManojGRamakrishnaNo ratings yet
- Bel Project & Training ReportDocument91 pagesBel Project & Training Reportvitrone2267% (3)
- HyundaiDocument1,083 pagesHyundaiArchit BhardwajNo ratings yet
- Introduction To Radar Signal ProcessingDocument11 pagesIntroduction To Radar Signal ProcessingEi Cho ZinNo ratings yet
- Ebook Ebook PDF National Association of Broadcasters Engineering Handbook 11Th Edition All Chapter PDF Docx KindleDocument41 pagesEbook Ebook PDF National Association of Broadcasters Engineering Handbook 11Th Edition All Chapter PDF Docx Kindlealberto.sowl745100% (28)
- 2021 Aptiv Whitepaper NextgenadasplatformDocument11 pages2021 Aptiv Whitepaper NextgenadasplatformThomas BourgoinNo ratings yet
- Bridgemaster E Radar Fault Reporting and First Line Servicing Ship'S ManualDocument240 pagesBridgemaster E Radar Fault Reporting and First Line Servicing Ship'S ManualqwpNo ratings yet
- 5 Tutorial Flight 3 - Radar Anti Ice EGPWSDocument45 pages5 Tutorial Flight 3 - Radar Anti Ice EGPWSCarlos Henrique Peroni JuniorNo ratings yet
- BroucherDocument20 pagesBroucherTaimoor MazariNo ratings yet
- Manual Bridge Master E, Furuno, NucleusDocument96 pagesManual Bridge Master E, Furuno, NucleusAinur100% (2)
- European Patent Application G01S 13/02, H04B 1/69,: Ultra-Wideband Radar Motion SensorDocument24 pagesEuropean Patent Application G01S 13/02, H04B 1/69,: Ultra-Wideband Radar Motion SensorGauravRajputNo ratings yet
- Heart-Beat Detection and Ranging Through A Wall Using Ultra Wide Band RadarDocument5 pagesHeart-Beat Detection and Ranging Through A Wall Using Ultra Wide Band RadarPuli Kishore KumarNo ratings yet
- IMO Model Course 1.07 On Radar Navigation at Operational Level (Secretariat)Document302 pagesIMO Model Course 1.07 On Radar Navigation at Operational Level (Secretariat)PETER RAFA100% (2)
- Radar 2009 A - 9 Antennas 2Document70 pagesRadar 2009 A - 9 Antennas 2Sudhanshu VermaNo ratings yet
- United States Patent: Kinghorn Et Al. Apr. 23, 2002Document7 pagesUnited States Patent: Kinghorn Et Al. Apr. 23, 2002Daniela ScobarNo ratings yet
- JLN205MK2 InstructionDocument92 pagesJLN205MK2 InstructionSang Aji Jaya SusenoNo ratings yet
- 8 Important COLREG Rule Must Be KnownDocument6 pages8 Important COLREG Rule Must Be KnownLiminNo ratings yet
- Deep Learning and Computer Vision Will Transform EntomologyDocument10 pagesDeep Learning and Computer Vision Will Transform EntomologyAri Luis HalosNo ratings yet
- Stealth Technology PresentationDocument35 pagesStealth Technology PresentationAshish Zachariah67% (3)
- Nuts & Volts February 2007Document108 pagesNuts & Volts February 2007Steven ClementsNo ratings yet
- RadarDocument356 pagesRadarJonay HernándezNo ratings yet
- Ultrasonic, Electric and Radar Measurements For Living TreesDocument27 pagesUltrasonic, Electric and Radar Measurements For Living TreesRuslan ZhivkovNo ratings yet
- Radar Target and Electroni Counter Measure Simulator PDFDocument1 pageRadar Target and Electroni Counter Measure Simulator PDFKi SeyNo ratings yet
- Identifikasi Problem Clutter, Penyebab Dan Solusinya Pada Pengamatan Radar CuacaDocument29 pagesIdentifikasi Problem Clutter, Penyebab Dan Solusinya Pada Pengamatan Radar Cuacaeko wardoyoNo ratings yet
- AIS Notes PDFDocument7 pagesAIS Notes PDFSandeep SinghNo ratings yet
- Next Generation Gripen (PDF) - SaabDocument16 pagesNext Generation Gripen (PDF) - SaabBrianNo ratings yet