Download as pdf or txt
You might also like
- Varstroj Varin 1700n Inverter Welder SchemaDocument13 pagesVarstroj Varin 1700n Inverter Welder SchemaMilomir KojicNo ratings yet
- Airport Information: Details For Benito Juarez IntlDocument24 pagesAirport Information: Details For Benito Juarez Intljose manuelNo ratings yet
- YSICatalog 1998Document85 pagesYSICatalog 1998danielNo ratings yet
- Analog and Digital Meters Assignment 2Document2 pagesAnalog and Digital Meters Assignment 2Caleb MaffinNo ratings yet
- Anatomy of A Figure: Cheat SheetDocument2 pagesAnatomy of A Figure: Cheat SheetRajachandra VoodigaNo ratings yet
- Mathplot CheatDocument5 pagesMathplot CheatThông Nguyễn MinhNo ratings yet
- Scx1000a-3 Stage3a PRDocument8 pagesScx1000a-3 Stage3a PRДмитрий БакайNo ratings yet
- Screenshot 2023-11-10 at 9.50.27 AMDocument1 pageScreenshot 2023-11-10 at 9.50.27 AMadamtawar44No ratings yet
- Study SeshDocument2 pagesStudy Seshnur izzaidahNo ratings yet
- tube-mic-pre-amp-www.circuitdiagram.netDocument2 pagestube-mic-pre-amp-www.circuitdiagram.netAnonymous Wyb8Y1No ratings yet
- Icando El Armad o Por Ductilid Ad Longitu Dinal) : (Arma Do FinalDocument9 pagesIcando El Armad o Por Ductilid Ad Longitu Dinal) : (Arma Do FinalfelipeNo ratings yet
- CE 2010 - Stability of Cubipod On RoundheadDocument10 pagesCE 2010 - Stability of Cubipod On RoundheadCUONG DINHNo ratings yet
- O.In/O.522, O-335J: en - Njlo.La V-0-5N-Oe - TVDocument1 pageO.In/O.522, O-335J: en - Njlo.La V-0-5N-Oe - TV林宜伈No ratings yet
- Propulsión II 2Document3 pagesPropulsión II 2Mauricio Acevedo GarciaNo ratings yet
- Objetivo 28Document1 pageObjetivo 28a01541972No ratings yet
- Tonepad RebotedelayDocument1 pageTonepad RebotedelayFungi APMNo ratings yet
- Tonepad RebotedelayDocument1 pageTonepad RebotedelaytumundoalternoNo ratings yet
- Tonepad - Rebotedelay PT2399Document1 pageTonepad - Rebotedelay PT2399pepe sanchezNo ratings yet
- Rebote Delay: Resistors IC's Capacitors Parts ListDocument1 pageRebote Delay: Resistors IC's Capacitors Parts ListAri RamwanNo ratings yet
- JEE Ultimate Crash Course 2.0: Maths Sequence and SeriesDocument2 pagesJEE Ultimate Crash Course 2.0: Maths Sequence and SeriesManish RajputNo ratings yet
- B11502016 - Assignment - 4 (100分)Document4 pagesB11502016 - Assignment - 4 (100分)Jasmine YangNo ratings yet
- Circuit AnalysisDocument5 pagesCircuit AnalysisSONAM LHENDUPNo ratings yet
- Solution Mid 2022Document5 pagesSolution Mid 2022minh hoangNo ratings yet
- Ags 23 - A10Document4 pagesAgs 23 - A10Felicia PriskillaNo ratings yet
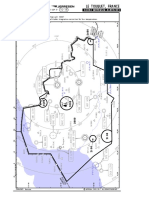
- Lfat/Ltq Le Touquet, France: .Radar - Minimum.AltitudesDocument10 pagesLfat/Ltq Le Touquet, France: .Radar - Minimum.AltitudesAurelien FLUTEAUXNo ratings yet
- DTS Sheet 2 ComponentDocument1 pageDTS Sheet 2 ComponenthimanshuNo ratings yet
- Amalgamation Including AS 14 13 - Class NotesDocument11 pagesAmalgamation Including AS 14 13 - Class NotesMainak AdhikaryNo ratings yet
- L&T Construction: PLAN AT EL (+) 529.750M (TOC)Document1 pageL&T Construction: PLAN AT EL (+) 529.750M (TOC)Powerhouse ShaftNo ratings yet
- Segmen 2, Jun 23Document21 pagesSegmen 2, Jun 23rizkyNo ratings yet
- 165279-CV-CD-001 - 1 - Plan at El - +0-000, Sections & DetailsDocument1 page165279-CV-CD-001 - 1 - Plan at El - +0-000, Sections & DetailsDiengNo ratings yet
- LMK HOP 140x80x5 IZVEŠTAJDocument6 pagesLMK HOP 140x80x5 IZVEŠTAJNIkola918No ratings yet
- CUENCA #44 - KM (51+267) : BADÉN 9.0m X 9.0mDocument1 pageCUENCA #44 - KM (51+267) : BADÉN 9.0m X 9.0mJULIO CESAR SALVATIERRA VEGANo ratings yet
- Anatomy of A Figure: Cheat SheetDocument3 pagesAnatomy of A Figure: Cheat SheetabishekNo ratings yet
- Long Section Rekon Dan Minor JalanDocument6 pagesLong Section Rekon Dan Minor JalanYudi FanizarNo ratings yet
- Triangle 1Document1 pageTriangle 1Toby GregoriusNo ratings yet
- Writereaddata Online TOR 07 Feb 2020 124413973O5WHYU0QSOIMap (Haryana) DelhiKatraExp PDFDocument3 pagesWritereaddata Online TOR 07 Feb 2020 124413973O5WHYU0QSOIMap (Haryana) DelhiKatraExp PDFasalaria1No ratings yet
- Ejemplos ASD FrecuenciaDocument6 pagesEjemplos ASD FrecuenciaPaola AvilaNo ratings yet
- Solthermo Magulong-NotesDocument10 pagesSolthermo Magulong-NotesMonica B. BautistaNo ratings yet
- Forced and Total Response in RL and RC CircuitsDocument11 pagesForced and Total Response in RL and RC CircuitsDr. Omar Sh. AlyozbakyNo ratings yet
- Parallel RLC Circuits Calculation For Electrical SystemDocument1 pageParallel RLC Circuits Calculation For Electrical SystemWilson (Electrical Engineer)100% (1)
- Angles in Quadrilateral: Sum of The Interior Angles 3600Document2 pagesAngles in Quadrilateral: Sum of The Interior Angles 3600Christina T Z-chYnNo ratings yet
- Plate ColumnsDocument3 pagesPlate ColumnsK SrikanthNo ratings yet
- Ilovepdf MergedDocument16 pagesIlovepdf Mergedmatiassantiago0309No ratings yet
- Ejercicios Mecánica de FluidosDocument11 pagesEjercicios Mecánica de Fluidosmatiassantiago0309No ratings yet
- Ilovepdf Merged RemovedDocument14 pagesIlovepdf Merged Removedmatiassantiago0309No ratings yet
- H I J K L M O P R S: Encofrado de Techo Cuarto NivelDocument1 pageH I J K L M O P R S: Encofrado de Techo Cuarto NivelAnthony SangayNo ratings yet
- Lecture 23Document2 pagesLecture 23api-3702538No ratings yet
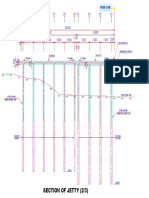
- Section of Jetty (2/3) : Face LineDocument1 pageSection of Jetty (2/3) : Face LineAhsan HabibNo ratings yet
- Aic HW3 110511079Document3 pagesAic HW3 110511079宮能翔No ratings yet
- T 3Document1 pageT 3tassio_petryNo ratings yet
- Build Your PC Online - Customize Your PC - PC StudioDocument3 pagesBuild Your PC Online - Customize Your PC - PC StudioManas BaruaNo ratings yet
- Anatomy of A Figure: Cheat SheetDocument2 pagesAnatomy of A Figure: Cheat SheetЭ. ТэмүүлэнNo ratings yet
- Supplementary WorksheetDocument5 pagesSupplementary Worksheet林妹妹No ratings yet
- HW3 - TH ChenDocument2 pagesHW3 - TH ChensandyNo ratings yet
- Anatomy of A Figure: Cheat SheetDocument2 pagesAnatomy of A Figure: Cheat SheetJHONNY OSORIO GALLEGONo ratings yet
- QC HW2Document4 pagesQC HW2Julie WangNo ratings yet
- Cost of Materials Civil Akij LTDDocument4 pagesCost of Materials Civil Akij LTDEngineering Ked SolutionNo ratings yet
- Pile Diameter BOQ: 14 5 1 P5L2 2 P8R2 P13L1Document2 pagesPile Diameter BOQ: 14 5 1 P5L2 2 P8R2 P13L1Chiranjaya HulangamuwaNo ratings yet
- Pauta Test 1Document4 pagesPauta Test 1Mathias IcarteNo ratings yet
- RSM270 Winter 2024 - Lecture 11Document60 pagesRSM270 Winter 2024 - Lecture 11RishikaNo ratings yet
- Lab 2 - Robotics - Robotics ToolboxDocument7 pagesLab 2 - Robotics - Robotics Toolboxkoko85100pNo ratings yet
- Single Phase AC Circuit - EC-IDocument8 pagesSingle Phase AC Circuit - EC-IMd Johurul IslamNo ratings yet
- Hall Effect Related Problems 2022Document10 pagesHall Effect Related Problems 2022Md Johurul IslamNo ratings yet
- Sinusoidal Function - EC-IDocument5 pagesSinusoidal Function - EC-IMd Johurul IslamNo ratings yet
- ED - Final Exam 2023Document1 pageED - Final Exam 2023Md Johurul IslamNo ratings yet
- Semiconductor - CSE - VU - 2017Document8 pagesSemiconductor - CSE - VU - 2017Md Johurul IslamNo ratings yet
- Energy Storage Elements - EC-IDocument9 pagesEnergy Storage Elements - EC-IMd Johurul IslamNo ratings yet
- Transistor Biasing ND FET BasicsDocument5 pagesTransistor Biasing ND FET BasicsMd Johurul IslamNo ratings yet
- CT-1 On 8-6-22 - PFTDocument1 pageCT-1 On 8-6-22 - PFTMd Johurul IslamNo ratings yet
- Preparation, Characterization and Electronic Properties of Fluorine-Doped Tin Oxide FilmsDocument4 pagesPreparation, Characterization and Electronic Properties of Fluorine-Doped Tin Oxide FilmsMd Johurul IslamNo ratings yet
- Hydrogen Production: ElectrolysisDocument3 pagesHydrogen Production: ElectrolysisMd Johurul IslamNo ratings yet
- A Long Straight Coil of Wire Can Be Used To Generate A Nearly Uniformmagnetic FieldDocument6 pagesA Long Straight Coil of Wire Can Be Used To Generate A Nearly Uniformmagnetic FieldMd Johurul IslamNo ratings yet
- Lesson - Plan - For 2017-2018 Even Semester January-June 2018Document4 pagesLesson - Plan - For 2017-2018 Even Semester January-June 2018Md Johurul IslamNo ratings yet
- Annex-III List of ExperimentsDocument5 pagesAnnex-III List of ExperimentsMd Johurul IslamNo ratings yet
- Correction NotesDocument1 pageCorrection NotesMd Johurul IslamNo ratings yet
- Part-III: Odd Semester (Exam 2013) : APEE3111 Electromagnetic Theory & AntennaDocument10 pagesPart-III: Odd Semester (Exam 2013) : APEE3111 Electromagnetic Theory & AntennaMd Johurul IslamNo ratings yet
- Thevenin's Theorem Lab: Voltage, VDocument3 pagesThevenin's Theorem Lab: Voltage, VMd Johurul IslamNo ratings yet
- Sukumar Roy - Abol TabolDocument46 pagesSukumar Roy - Abol TabolMd Johurul IslamNo ratings yet
- Physics I Problems PDFDocument1 pagePhysics I Problems PDFbosschellenNo ratings yet
- Position-Time and Velocity-Time GraphsDocument21 pagesPosition-Time and Velocity-Time GraphsLucas JerichoNo ratings yet
- Electricity Note DC Current PDFDocument8 pagesElectricity Note DC Current PDFSolomonNo ratings yet
- LEC 6 - CE333 Illumination DesignDocument5 pagesLEC 6 - CE333 Illumination DesignAndry Eloise JacaNo ratings yet
- UOP375 Wmky 5801Document14 pagesUOP375 Wmky 5801amin100% (1)
- Theoretical Problem 1 of Rmpho Romanian PhysicsDocument2 pagesTheoretical Problem 1 of Rmpho Romanian PhysicsLegendaryking PjNo ratings yet
- Solutions NumericalsDocument3 pagesSolutions Numericalsdevesh saiNo ratings yet
- Electrodynamics An Intensive Course by Masud Chaichian, Ioan Merches, Daniel Radu and Anca TureanuDocument675 pagesElectrodynamics An Intensive Course by Masud Chaichian, Ioan Merches, Daniel Radu and Anca TureanuAndrei GobarevNo ratings yet
- Emtl Note Unit IIDocument50 pagesEmtl Note Unit IINooruddin SheikNo ratings yet
- Crash Tests Are Used To Measure The Safety of New Car Designs. in One Type of Test, A CarDocument2 pagesCrash Tests Are Used To Measure The Safety of New Car Designs. in One Type of Test, A CarYu SunNo ratings yet
- Measurement Very Fast Transient Overvoltages (Vfto) in A Gis ModuleDocument4 pagesMeasurement Very Fast Transient Overvoltages (Vfto) in A Gis Moduleajay_kairiNo ratings yet
- Case Study - Capacitor Bank Switching Transients: Dharshana Muthumuni Manitoba HVDC Research CenterDocument62 pagesCase Study - Capacitor Bank Switching Transients: Dharshana Muthumuni Manitoba HVDC Research Centersandeep kumar mishraNo ratings yet
- CH 04Document133 pagesCH 04api-3699340No ratings yet
- Delmars Standard Textbook of Electricity 6th Edition Herman Test Bank 1Document8 pagesDelmars Standard Textbook of Electricity 6th Edition Herman Test Bank 1april100% (52)
- Module Learning Activity Sheet Science 6 3rd Quarter Herrybert ValdezDocument12 pagesModule Learning Activity Sheet Science 6 3rd Quarter Herrybert ValdezDaiserie LlanezaNo ratings yet
- GROWDocument36 pagesGROWmk gandhiNo ratings yet
- EEEN221 Assignment 01 With Answers 01Document15 pagesEEEN221 Assignment 01 With Answers 01Lame MorupisiNo ratings yet
- Response of First-Order RL and RC Circuits: Assessment ProblemsDocument87 pagesResponse of First-Order RL and RC Circuits: Assessment ProblemsHalise GsNo ratings yet
- Mitigacion AC en Ductos Interferencia ACDocument38 pagesMitigacion AC en Ductos Interferencia ACSharon FreemanNo ratings yet
- (Iii) CoupleDocument45 pages(Iii) Coupleashok KumarNo ratings yet
- Rotation Dynamics and Angular Momentum PDFDocument4 pagesRotation Dynamics and Angular Momentum PDFTarun GuptaNo ratings yet
- Problemset 1Document3 pagesProblemset 1Pratap KunathiNo ratings yet
- KWV 12 Physcs Doppler Effect SolutionsDocument34 pagesKWV 12 Physcs Doppler Effect Solutionsmthembukamohelo1100% (1)
- ANNEX. Exploded View & Part List (UN43KU630DFXZA AA01)Document12 pagesANNEX. Exploded View & Part List (UN43KU630DFXZA AA01)Jose AlbanNo ratings yet
- Electric Potential General Physics 2Document36 pagesElectric Potential General Physics 2Johndolf SolerNo ratings yet
- Force Questions: GCE Physics 1.3.2 ForcesDocument19 pagesForce Questions: GCE Physics 1.3.2 ForcesJjrlNo ratings yet
- DC Contactor CB 80 To 200Document10 pagesDC Contactor CB 80 To 200heri fauziNo ratings yet
- Chapter 11 Mcq'sDocument28 pagesChapter 11 Mcq'sTahira JiNo ratings yet