Download as pdf or txt
You might also like
- Western Digital Industrial iNAND 7250 e MMC 5 1 With HS400 Interface Data Sheet DOC 56 34 01460 IX EM122Document48 pagesWestern Digital Industrial iNAND 7250 e MMC 5 1 With HS400 Interface Data Sheet DOC 56 34 01460 IX EM122GRANGENo ratings yet
- Berner Air Curtain Installation InstructionsDocument16 pagesBerner Air Curtain Installation InstructionsAldrich ColladoNo ratings yet
- Multi Level Inverter DocumentationDocument25 pagesMulti Level Inverter Documentationn anushaNo ratings yet
- Low Losses PWM For High Power Press-Pack IGBT InvertersDocument9 pagesLow Losses PWM For High Power Press-Pack IGBT InvertersMohamed BerririNo ratings yet
- Selective Harmonic Elimination by Programmable Pulse Width Modulation in InvertersDocument6 pagesSelective Harmonic Elimination by Programmable Pulse Width Modulation in InvertersseventhsensegroupNo ratings yet
- Hardware Implementation of Neural Network Controlled Optimal InverterDocument6 pagesHardware Implementation of Neural Network Controlled Optimal InvertersamNo ratings yet
- Analysis of 3-Phase 3-Level Diode Clampe PDFDocument5 pagesAnalysis of 3-Phase 3-Level Diode Clampe PDFGRANDHI LAKSHMINARAYANANo ratings yet
- Carrier Based Sinusodial PWM Scheme For The Nine Switch ConverterDocument6 pagesCarrier Based Sinusodial PWM Scheme For The Nine Switch ConverterShankar MukalNo ratings yet
- Basic Matrix ConverterDocument6 pagesBasic Matrix ConverterSaranya MenonNo ratings yet
- Selective Harmonics Elimination Technique in Single Phase Unipolar H-Bridge InverterDocument4 pagesSelective Harmonics Elimination Technique in Single Phase Unipolar H-Bridge InverterFatih KayaNo ratings yet
- Integrated Analog Electronics Design of Two-Stage Opamp Project ReportDocument24 pagesIntegrated Analog Electronics Design of Two-Stage Opamp Project ReportGülçin Köse50% (2)
- A Simple and Ultra-Fast DSP-Based Space Vector PWM Algorithm andDocument6 pagesA Simple and Ultra-Fast DSP-Based Space Vector PWM Algorithm andShiviAroraNo ratings yet
- Selective Harmonic Elimination of PWM ACAC Voltage Controller Using Hybrid RGAPSDocument7 pagesSelective Harmonic Elimination of PWM ACAC Voltage Controller Using Hybrid RGAPSSamrat PvNo ratings yet
- AM Modulation and Demodulation CircuitsDocument13 pagesAM Modulation and Demodulation Circuitsموسى سعد لعيبيNo ratings yet
- Ieee Bakker 1996Document5 pagesIeee Bakker 1996kurabyqldNo ratings yet
- Different PWM Modulation Techniques Indexes Performance Evaluation, 1993.Document7 pagesDifferent PWM Modulation Techniques Indexes Performance Evaluation, 1993.Ali H. Numan100% (1)
- On Continuous Control of PWM Inverters in The Overmodulation RanDocument6 pagesOn Continuous Control of PWM Inverters in The Overmodulation RanAshish KushwahaNo ratings yet
- Neural Network Based Optimal Switching Pattern Generation For Multiple Pulse Width Modulated InverterDocument6 pagesNeural Network Based Optimal Switching Pattern Generation For Multiple Pulse Width Modulated InverterIJMERNo ratings yet
- 6.selective Harmonic Elimination of Multilevel Inverter Using SHEPWM TechniqueDocument4 pages6.selective Harmonic Elimination of Multilevel Inverter Using SHEPWM Techniqueanji.guvvalaNo ratings yet
- High Gain GBW and SR P 5mWDocument8 pagesHigh Gain GBW and SR P 5mWLucas Compassi SeveroNo ratings yet
- Modeling and Analysis On PWM Techniques For AC Voltage ControllersDocument6 pagesModeling and Analysis On PWM Techniques For AC Voltage ControllersMani KandanNo ratings yet
- Regular Sampled PWMDocument11 pagesRegular Sampled PWMg.jayakrishnaNo ratings yet
- Minimization of Harmonics in Multi-Level Inverters Using Bat AlgorithmDocument8 pagesMinimization of Harmonics in Multi-Level Inverters Using Bat AlgorithmAkku TyagiNo ratings yet
- Ilyin2016 PDFDocument6 pagesIlyin2016 PDFAnonymous fqHGrbwxeFNo ratings yet
- Low Power Ring Oscillator at 180nm CMOS Technology: Aman Shivhare M. K. GuptaDocument4 pagesLow Power Ring Oscillator at 180nm CMOS Technology: Aman Shivhare M. K. GuptaRam MNo ratings yet
- Integration of Distributed Generation Using Multilevel Invertor For Grid Connected Energy SystemsDocument39 pagesIntegration of Distributed Generation Using Multilevel Invertor For Grid Connected Energy SystemsMaaz AhmadNo ratings yet
- Friday,: I February Hi, IDocument3 pagesFriday,: I February Hi, IYJ ZHANGNo ratings yet
- A 2.5 V High Gain CMOS Differential Input, Differential Output Single Stage AmplifierDocument6 pagesA 2.5 V High Gain CMOS Differential Input, Differential Output Single Stage AmplifierRaghuveerprasad IppiliNo ratings yet
- Please Specify The Important Parameters For Semiconductor DevicesDocument5 pagesPlease Specify The Important Parameters For Semiconductor DevicesAlice LiewNo ratings yet
- B19Document34 pagesB19Suganthi ShanmugasundarNo ratings yet
- THD Reduction in Multilevel Inverters Using Real-Time AlgorithmDocument12 pagesTHD Reduction in Multilevel Inverters Using Real-Time AlgorithmInternational Organization of Scientific Research (IOSR)No ratings yet
- Low Dropout Regulator With Temperature Coefficient Curvature Correction TopologyDocument4 pagesLow Dropout Regulator With Temperature Coefficient Curvature Correction TopologyParindraNo ratings yet
- Design of A Telescopic Fully Differential OTADocument7 pagesDesign of A Telescopic Fully Differential OTAUdai ValluruNo ratings yet
- DC Voltage Control and Stability Analysis of PWM-voltage-type Reversible RectifiersDocument12 pagesDC Voltage Control and Stability Analysis of PWM-voltage-type Reversible RectifiersAli ErNo ratings yet
- CTRL Sys Lab ManualDocument46 pagesCTRL Sys Lab Manualabixek100% (2)
- Research Paper A Novel Method For Near State Pulse Width Modulation (NSPWM) Based Chopper DrivesDocument4 pagesResearch Paper A Novel Method For Near State Pulse Width Modulation (NSPWM) Based Chopper Drivesdivyamanikandan007No ratings yet
- A Cmos Switching Mode Amplifier With 3 V Output Swing For Continuous-Wave Frequencies Up To 4 GHZDocument3 pagesA Cmos Switching Mode Amplifier With 3 V Output Swing For Continuous-Wave Frequencies Up To 4 GHZwbnetNo ratings yet
- Doc-A.9-Driver Card For Single Phase Inverter Using Skhi22br PDFDocument66 pagesDoc-A.9-Driver Card For Single Phase Inverter Using Skhi22br PDFsivananda11No ratings yet
- A Novel Low-Power CMOS Operational Amplifier With High Slew Rate and High Common-Mode Rejection RatioDocument7 pagesA Novel Low-Power CMOS Operational Amplifier With High Slew Rate and High Common-Mode Rejection RatioJanon MitnickNo ratings yet
- Wilkinson Power DividerDocument13 pagesWilkinson Power DividerMaira IslamNo ratings yet
- A Low Power Preamplifier Latch Based ComparatorDocument5 pagesA Low Power Preamplifier Latch Based ComparatorSachin SethNo ratings yet
- Multilvel Inverter ControlDocument125 pagesMultilvel Inverter ControlVenkata Ramdas BonamNo ratings yet
- CMOS Voltage Level Up Shifter A ReviewDocument4 pagesCMOS Voltage Level Up Shifter A ReviewtrephenaNo ratings yet
- MATLAB Based Analysis and Simulation of Multilevel InvertersDocument3 pagesMATLAB Based Analysis and Simulation of Multilevel InvertersMalikAlrahabiNo ratings yet
- 100% SEF Case StudyDocument5 pages100% SEF Case StudyO P Sridharan PerumalNo ratings yet
- ArticleST 000559Document7 pagesArticleST 000559hamza mesaiNo ratings yet
- Discontinuous SVPWM TechniquesDocument6 pagesDiscontinuous SVPWM TechniquesAnonymous 1D3dCWNcNo ratings yet
- Lecture 7-8-9Document65 pagesLecture 7-8-9Asad MumtazNo ratings yet
- Optimizing The Design of A Switched-Capacitor Dynamic-Element-Matching AmplifierDocument6 pagesOptimizing The Design of A Switched-Capacitor Dynamic-Element-Matching Amplifierreza12368No ratings yet
- Multi-Modular Multi-Level Pulse Width Modulated Inverters: Mon W LDocument6 pagesMulti-Modular Multi-Level Pulse Width Modulated Inverters: Mon W LveguruprasadNo ratings yet
- Trapezoidal PWM Scheme For Cascaded Multilevel InverterDocument5 pagesTrapezoidal PWM Scheme For Cascaded Multilevel InverterRodovarNo ratings yet
- Genetic 15 LDocument6 pagesGenetic 15 LMasudur RahmanNo ratings yet
- An Integrated Low Power Buck Converter With A Comparator Controlled Low-Side SwitchDocument4 pagesAn Integrated Low Power Buck Converter With A Comparator Controlled Low-Side SwitchEngr Nayyer Nayyab MalikNo ratings yet
- High PSRR Voltage Reference Circuit With Dual-Output For Low Power ApplicationsDocument4 pagesHigh PSRR Voltage Reference Circuit With Dual-Output For Low Power Applicationsmd istiyakNo ratings yet
- 25 - Sinusoidal Pulse Width Modulation (SPWM) With Variable Carrier PDFDocument6 pages25 - Sinusoidal Pulse Width Modulation (SPWM) With Variable Carrier PDFDevendra HoleyNo ratings yet
- Two-Stage Operational Amplifier Design Using Gm/Id MethodDocument7 pagesTwo-Stage Operational Amplifier Design Using Gm/Id Methodabhinav kumarNo ratings yet
- 4.1: The Comparator: IN REFDocument12 pages4.1: The Comparator: IN REFMadhanDhonianNo ratings yet
- A Study of Comparative Analysis of Different PWMDocument6 pagesA Study of Comparative Analysis of Different PWMwilliam chaconNo ratings yet
- DTC-SVM Scheme For Induction Motors Fed With A Three-Level InverterDocument5 pagesDTC-SVM Scheme For Induction Motors Fed With A Three-Level Inverterdam_dar666No ratings yet
- A High Frequency Modular Resonant Converter For The Induction HeatingDocument7 pagesA High Frequency Modular Resonant Converter For The Induction HeatingŽarko DačevićNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Training Pack On Electrical Safety & PI For MTT July 25Document52 pagesTraining Pack On Electrical Safety & PI For MTT July 25madhulika100% (1)
- Digital Electronics ExamDocument4 pagesDigital Electronics ExamPeter JumreNo ratings yet
- LM567/LM567C Tone Decoder: Features ApplicationsDocument18 pagesLM567/LM567C Tone Decoder: Features ApplicationsNurcholisNo ratings yet
- 4x3500 Operation ManualDocument25 pages4x3500 Operation ManualHector QuevedoNo ratings yet
- Probset in Semiconductor Theory Diodes and Application Topics 2 March 2019Document2 pagesProbset in Semiconductor Theory Diodes and Application Topics 2 March 2019Ralph Jayson SilangNo ratings yet
- 1.0SMB SeriesDocument6 pages1.0SMB SeriesPablo AllosiaNo ratings yet
- M/S Brand Matirx M/s Shaheen TradersDocument12 pagesM/S Brand Matirx M/s Shaheen TradersJ IKhanNo ratings yet
- Nerd Club - How SPI Works With An SD CardDocument7 pagesNerd Club - How SPI Works With An SD CardJay SharmaNo ratings yet
- IECEx BAS 14.0097X 003Document11 pagesIECEx BAS 14.0097X 003Marcos SiqueiraNo ratings yet
- Product Data Sheet: Dehnguard® Modular For North America DG Mu 3py 208 3W+G (908 300)Document1 pageProduct Data Sheet: Dehnguard® Modular For North America DG Mu 3py 208 3W+G (908 300)leonardomarinNo ratings yet
- A Project On Overclocking PDFDocument16 pagesA Project On Overclocking PDFAnkit JindalNo ratings yet
- Design of A Sensor-Based Adaptive Smart Home System Using NXP ARM Cortex-M3Document4 pagesDesign of A Sensor-Based Adaptive Smart Home System Using NXP ARM Cortex-M3Poulami RoyNo ratings yet
- 7SJ661 V4 - 3 QD110 - PRN - 08 - 32 - 15Document6 pages7SJ661 V4 - 3 QD110 - PRN - 08 - 32 - 15giathi957835No ratings yet
- STK681-210-E: Forward/Reverse Motor DriverDocument0 pagesSTK681-210-E: Forward/Reverse Motor Driverfredy51No ratings yet
- EM 6400 Manual PDFDocument80 pagesEM 6400 Manual PDFvaibhavnriitmNo ratings yet
- N75 Checking Procedure - PierburgDocument2 pagesN75 Checking Procedure - PierburgSrđan PavićNo ratings yet
- Narrative Report On School Safety Framework Sept 8,2017Document2 pagesNarrative Report On School Safety Framework Sept 8,2017Maria Ramona FelixNo ratings yet
- Mos Inverter PDFDocument44 pagesMos Inverter PDFhet shahNo ratings yet
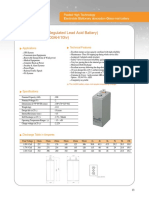
- (Valve Regulated Lead Acid Battery) ESG 200 (2V, 200AH/10hr)Document1 page(Valve Regulated Lead Acid Battery) ESG 200 (2V, 200AH/10hr)RosiinNo ratings yet
- Globe Telecom Globe Telecom: 5G Database Pre - SurveyDocument54 pagesGlobe Telecom Globe Telecom: 5G Database Pre - SurveyJamil Baraquiel LucenaNo ratings yet
- 2G Paging Analysis: NOVATEL - IT - Algeria - Internal - Document - V032016 RNO - DepartementDocument10 pages2G Paging Analysis: NOVATEL - IT - Algeria - Internal - Document - V032016 RNO - DepartementtadjouaminaNo ratings yet
- Yamaha NS-P270 User ManualDocument40 pagesYamaha NS-P270 User ManualStefanoViganóNo ratings yet
- Pair-Ion Plasma Generation Using FullerenesDocument5 pagesPair-Ion Plasma Generation Using FullerenesAhmad Imran KhanNo ratings yet
- Chapter 6 Power Factor Improvement (Compatibility Mode)Document53 pagesChapter 6 Power Factor Improvement (Compatibility Mode)katlegoNo ratings yet
- Girma Moges PDFDocument117 pagesGirma Moges PDFmengistu AddisNo ratings yet
- Free USBiDocument13 pagesFree USBirastaa1No ratings yet
- Delta Electronics Inc Dps-650xb X 650w Ecos 3293 ReportDocument1 pageDelta Electronics Inc Dps-650xb X 650w Ecos 3293 ReportHector Villarreal100% (1)
- PH Meter Sku Sen0161 - Robot WikiDocument6 pagesPH Meter Sku Sen0161 - Robot WikiPanji SiregarNo ratings yet